You might also like
- PHD Research Proposal (Electrical Power & Energy Engineering) PDFDocument13 pagesPHD Research Proposal (Electrical Power & Energy Engineering) PDFSaraMuzaffar33% (3)
- 482 Load ManagementDocument13 pages482 Load ManagementrichierichNo ratings yet
- Appliance Scheduling Optimization in Smart Home NetworkDocument15 pagesAppliance Scheduling Optimization in Smart Home NetworknhatvpNo ratings yet
- Wiring MattersDocument40 pagesWiring MattersYashveer TakooryNo ratings yet
- Hybrid Energy SystemsDocument15 pagesHybrid Energy SystemsChris StillNo ratings yet
- Guideline Introducing Demand Side Management To SmesDocument8 pagesGuideline Introducing Demand Side Management To SmesGaurav SushrutNo ratings yet
- J Apenergy 2019 113530Document12 pagesJ Apenergy 2019 113530John-Sun LalyNo ratings yet
- Energy Management System ReportDocument67 pagesEnergy Management System ReportSiva RajNo ratings yet
- Abstrac 1Document10 pagesAbstrac 1kkkNo ratings yet
- PV PDFDocument25 pagesPV PDFFilmon TNo ratings yet
- Home Energy Management System: Technical ReportDocument6 pagesHome Energy Management System: Technical ReportVIKRAM K 14PHD0358No ratings yet
- Energy Management and Operational Planning of A Microgrid With A PV-Based Active Generator For Smart Grid ApplicationsDocument10 pagesEnergy Management and Operational Planning of A Microgrid With A PV-Based Active Generator For Smart Grid ApplicationsAhmed WestministerNo ratings yet
- Tosato_2009Document41 pagesTosato_2009ParvathyNo ratings yet
- Frequency Control Large BESSDocument4 pagesFrequency Control Large BESSClaysius DewanataNo ratings yet
- Reactive Power Pricing: Komal SethiDocument6 pagesReactive Power Pricing: Komal SethijannatsethiNo ratings yet
- Hybrid Renewable Energy System: A Review: Swati Negi and Lini MathewDocument8 pagesHybrid Renewable Energy System: A Review: Swati Negi and Lini MathewJhennyfer MacanasNo ratings yet
- 2-Stability and Reliability Improvement in Solar Wind Hybrid Power System With Battery Energy Storage StationDocument9 pages2-Stability and Reliability Improvement in Solar Wind Hybrid Power System With Battery Energy Storage StationEngrImranKhanNo ratings yet
- Energy Management Techniques PDFDocument8 pagesEnergy Management Techniques PDFBAHJARI AMINENo ratings yet
- Demand Response by Aggregates of Domestic Water Heaters With Adaptive Model Predictive ControlDocument5 pagesDemand Response by Aggregates of Domestic Water Heaters With Adaptive Model Predictive ControlJaspreetSinghNo ratings yet
- An Intelligent Load Management System With Renewable Energy Integration For Smart HomesDocument14 pagesAn Intelligent Load Management System With Renewable Energy Integration For Smart HomesektNo ratings yet
- Distribution System Reliability in A Deregulated Environment: A Case StudyDocument6 pagesDistribution System Reliability in A Deregulated Environment: A Case Studyapi-3697505No ratings yet
- +J Procs 2014 05 450 PDFDocument8 pages+J Procs 2014 05 450 PDFhadiNo ratings yet
- Role of Power Electronics in Advancing Smart Grid InfrastructureDocument20 pagesRole of Power Electronics in Advancing Smart Grid InfrastructureDevEnvo LtdNo ratings yet
- National and Regional Power PlanningDocument43 pagesNational and Regional Power PlanningrahulNo ratings yet
- +design and Implementation of A Low CostDocument9 pages+design and Implementation of A Low CostmabhatNo ratings yet
- A Survey of A Residential Load Profile For Demand Side Management Systems 2017Document5 pagesA Survey of A Residential Load Profile For Demand Side Management Systems 2017babuthomas23No ratings yet
- User Behavior Prediction in Energy Consumption in Housing Using Bayesian NetworksDocument8 pagesUser Behavior Prediction in Energy Consumption in Housing Using Bayesian Networksm.priyonoNo ratings yet
- 05955177Document9 pages05955177awais saeedNo ratings yet
- Optimal Scheduling of Smart Homes AppliancesDocument4 pagesOptimal Scheduling of Smart Homes Appliancesjorbol827No ratings yet
- Smart Home Energy Management System ReviewDocument7 pagesSmart Home Energy Management System ReviewAdhitya Rahman DwitomoNo ratings yet
- Research Action Plane For Doctoral StudyDocument16 pagesResearch Action Plane For Doctoral StudyGetie Tesfaye ZelieNo ratings yet
- Energy Management Strategies For Hybrid PV/Diesel Energy Systems: Simulation and Experimental ValidationDocument9 pagesEnergy Management Strategies For Hybrid PV/Diesel Energy Systems: Simulation and Experimental Validationollata kalanoNo ratings yet
- The Smart Grid - Enabling Energy Efficiency and Demand Response - C4Document16 pagesThe Smart Grid - Enabling Energy Efficiency and Demand Response - C4Kiên PhạmNo ratings yet
- A Fair Pricing Mechanism in Smart Grids For Low Energy Consumption UsersDocument10 pagesA Fair Pricing Mechanism in Smart Grids For Low Energy Consumption Usersarun rajaNo ratings yet
- Smart GridDocument10 pagesSmart GridAnand SreekumarNo ratings yet
- Real-Time Genetic Algorithm Optimization of Reactive PowerDocument10 pagesReal-Time Genetic Algorithm Optimization of Reactive Powerelias vasquezNo ratings yet
- Chapter IDocument3 pagesChapter IbasikaramakanthNo ratings yet
- Power Grid Synchronization by Controlling Frequency For Hydropower PlantsDocument47 pagesPower Grid Synchronization by Controlling Frequency For Hydropower PlantsTadele AmogneNo ratings yet
- Energy Management Systems Aggregators A Literature SurveyDocument13 pagesEnergy Management Systems Aggregators A Literature SurveyHugo Andres RodriguezNo ratings yet
- Controlled simultaneous birth energy in microgrids with VPD/FQB strategiesDocument4 pagesControlled simultaneous birth energy in microgrids with VPD/FQB strategiesOseeNo ratings yet
- PDFDocument10 pagesPDFAhmed WestministerNo ratings yet
- Project Summery: Development of Renewable Energy Based Micro-Grid For Rural Area ElectrificationDocument4 pagesProject Summery: Development of Renewable Energy Based Micro-Grid For Rural Area ElectrificationM. SaoodNo ratings yet
- Chapter No. 2: This Chapter Include The Review of Previous Research LiteratureDocument33 pagesChapter No. 2: This Chapter Include The Review of Previous Research LiteratureMuhammad Umer Abdullah QureshiNo ratings yet
- Electrical Power and Energy Systems: Mohammad Rastegar, Mahmud Fotuhi-Firuzabad, Hamidreza ZareipourDocument7 pagesElectrical Power and Energy Systems: Mohammad Rastegar, Mahmud Fotuhi-Firuzabad, Hamidreza ZareipourSyamasree RahaNo ratings yet
- Reactive Power Market Based Consolidated Compensation: Abslract-ADocument6 pagesReactive Power Market Based Consolidated Compensation: Abslract-Aapi-3697505No ratings yet
- Energies: Smart Home Energy ManagementDocument5 pagesEnergies: Smart Home Energy ManagementVIKRAM K 14PHD0358No ratings yet
- Battery Energy Storage System For Peak Shaving and Voltage Unbalance MitigationDocument7 pagesBattery Energy Storage System For Peak Shaving and Voltage Unbalance MitigationGonzalo GomezNo ratings yet
- Peak Demand Management 101Document8 pagesPeak Demand Management 101johodadaNo ratings yet
- PhotovolticDocument10 pagesPhotovolticViraj DissanayakeNo ratings yet
- Power Converters and Control of Renewable Energy Systems DADocument52 pagesPower Converters and Control of Renewable Energy Systems DAaliNo ratings yet
- Unit-I Energy Conservation: Details of "Energy" SectorsDocument18 pagesUnit-I Energy Conservation: Details of "Energy" SectorsSandeep SandyNo ratings yet
- Paper For Manipal UniDocument10 pagesPaper For Manipal Univstejwani1No ratings yet
- IEM - 15 - Grid-Connected Photovoltaic Systems An Overview of Recent Research and Emerging PV Converter Technology - 1Document36 pagesIEM - 15 - Grid-Connected Photovoltaic Systems An Overview of Recent Research and Emerging PV Converter Technology - 1Swati KarNo ratings yet
- Journal Paper ODzoboDocument27 pagesJournal Paper ODzoboodzoboNo ratings yet
- Energy Storage in Future Smart GridDocument6 pagesEnergy Storage in Future Smart Gridtushar.wadghuleNo ratings yet
- Europe: Impact of Dispersed and Renewable Generation On Power System StructureDocument38 pagesEurope: Impact of Dispersed and Renewable Generation On Power System StructuredanielraqueNo ratings yet
- Yu 2013Document12 pagesYu 2013marvincabalesNo ratings yet
- Improving Voltage Profile of Residential Distribution Systems Using Rooftop PVs and Battery Energy Storage SystemsDocument11 pagesImproving Voltage Profile of Residential Distribution Systems Using Rooftop PVs and Battery Energy Storage SystemsSoumyabrata BarikNo ratings yet
- Distributed Generation (DG) - An Option For Sustainable EnergyDocument9 pagesDistributed Generation (DG) - An Option For Sustainable EnergyOnwuntaNo ratings yet
- Laser and MaserDocument10 pagesLaser and MaserDrAnkita V. KushwahaNo ratings yet
- Cambridge IGCSE: PHYSICS 0625/42Document16 pagesCambridge IGCSE: PHYSICS 0625/42Kamin Kain SiriwatwetchakulNo ratings yet
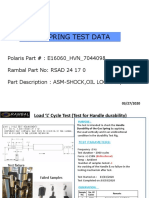
- Gas Spring Test Data Gas Spring Test DataDocument3 pagesGas Spring Test Data Gas Spring Test DataRaja Sekaran SajjaNo ratings yet
- Design & Development of Diverter Damper With Improved Heat DissipationDocument10 pagesDesign & Development of Diverter Damper With Improved Heat DissipationUGCJOURNAL PUBLICATION100% (1)
- Ecaadesigradi2019 465Document10 pagesEcaadesigradi2019 465Rhino ArdiawanNo ratings yet
- David Piña - Resume 2022 MAYDocument3 pagesDavid Piña - Resume 2022 MAYDavid PiñaNo ratings yet
- Nomograph For RCF Determination: ExampleDocument2 pagesNomograph For RCF Determination: Exampleshikhasharma_85No ratings yet
- 180 3 1242 - ItalyDocument11 pages180 3 1242 - ItalyLaura Lara OrtizNo ratings yet
- Electromagnetic Spectrum and Optics AssessmentDocument5 pagesElectromagnetic Spectrum and Optics AssessmentKenneth Roy MatuguinaNo ratings yet
- Thermal CeramicsDocument2 pagesThermal CeramicsJulius ValenciaNo ratings yet
- ABG Measuring Water Flow Through A Geotextile TECH NOTEDocument1 pageABG Measuring Water Flow Through A Geotextile TECH NOTEMACOYNo ratings yet
- Metallography: Standard Terminology Relating ToDocument33 pagesMetallography: Standard Terminology Relating To陳勉中No ratings yet
- Designation: D695 15 Standard Test Method For Compressive Properties of Rigid Plastics 1Document9 pagesDesignation: D695 15 Standard Test Method For Compressive Properties of Rigid Plastics 1วรศิษฐ์ อ๋องNo ratings yet
- Equivalent Circuit Implementation of Demyelinated Human PDFDocument95 pagesEquivalent Circuit Implementation of Demyelinated Human PDFAndres PosadaNo ratings yet
- 7in 29ppf 13Cr-80 JFE BearDocument1 page7in 29ppf 13Cr-80 JFE BearYeit HauNo ratings yet
- Kinematics Particle Straight LineDocument51 pagesKinematics Particle Straight LineisamalhassanNo ratings yet
- Profil Paparan Radiasi Instalasi Radiologi - Dwi RochmayantiDocument5 pagesProfil Paparan Radiasi Instalasi Radiologi - Dwi RochmayantiFadila Nur'AeniNo ratings yet
- Chapter 13 - Magnetic Effects of Electric Current: Class - X ScienceDocument18 pagesChapter 13 - Magnetic Effects of Electric Current: Class - X ScienceGovind DabralNo ratings yet
- The Ins and Outs of Human Cognition in The Construction of MeaningDocument11 pagesThe Ins and Outs of Human Cognition in The Construction of MeaningmarceloNo ratings yet
- RD Sharma Solution Class 9 Maths Chapter 18 Surface Area and Volume of Cuboid and Cube PDFDocument16 pagesRD Sharma Solution Class 9 Maths Chapter 18 Surface Area and Volume of Cuboid and Cube PDFSaravanan MariNo ratings yet
- Cambridge O Level: Mathematics (Syllabus D) 4024/22Document20 pagesCambridge O Level: Mathematics (Syllabus D) 4024/22D.T.CNo ratings yet
- 3L-NPC SVPWM - ApfDocument8 pages3L-NPC SVPWM - Apfsgw.sgwNo ratings yet
- Experimental Analysis of E-Glass /epoxy & E-Glass /polyester Composites For Auto Body PanelDocument8 pagesExperimental Analysis of E-Glass /epoxy & E-Glass /polyester Composites For Auto Body PanelmusebladeNo ratings yet
- Arihant IIT JEE BooksDocument6 pagesArihant IIT JEE BooksAkshat N. Kumar0% (1)
- Metfloor 60 - Composite Deck Slab Concrete VolumeDocument4 pagesMetfloor 60 - Composite Deck Slab Concrete VolumeHardeo Dennis ChattergoonNo ratings yet
- Engineering Experience - Example 1 - The P.Eng. ApplicantDocument26 pagesEngineering Experience - Example 1 - The P.Eng. Applicantgökhan keserNo ratings yet
- Design of Double Lane Road BridgeDocument12 pagesDesign of Double Lane Road Bridgekitti kothapalliNo ratings yet
- Marina Pier Repair Nasugbu BatangasDocument28 pagesMarina Pier Repair Nasugbu BatangasDennis SagaoNo ratings yet
- Fundamentals and Principles of Soil MechanicsDocument13 pagesFundamentals and Principles of Soil Mechanicshuhu heheNo ratings yet
- Science 7 q3 Slm14 RemovedDocument14 pagesScience 7 q3 Slm14 RemovedChristian Emman TesoroNo ratings yet