You might also like
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- Token Ring Technology ReportFrom EverandToken Ring Technology ReportNo ratings yet
- About The Device/PLC Connection ManualsDocument7 pagesAbout The Device/PLC Connection ManualsDenisNo ratings yet
- MW - HW.Ketemalemat - JIGJIGA.EER - 2022 03 16 17 14 38Document6 pagesMW - HW.Ketemalemat - JIGJIGA.EER - 2022 03 16 17 14 38Abera TeshomeNo ratings yet
- MDT10P57: 1. General DescriptionDocument13 pagesMDT10P57: 1. General DescriptionJuan Carlos Ramírez LeónNo ratings yet
- Robot001 BOMDocument9 pagesRobot001 BOMAlenNo ratings yet
- 9600LSY-1 (New VersionEnglish) (CE)Document381 pages9600LSY-1 (New VersionEnglish) (CE)Ulianov Sinforoso100% (1)
- WIZ811MJ Datasheet v1.2Document13 pagesWIZ811MJ Datasheet v1.2ummonkNo ratings yet
- R448 Manual From Mac Far Lane GeneratorsDocument14 pagesR448 Manual From Mac Far Lane Generatorstocanh1990No ratings yet
- 323 1059 190.1Document402 pages323 1059 190.1Tim WalkerNo ratings yet
- CiscoDocument8 pagesCiscoGovindaraju HSNo ratings yet
- Leroy Somer r448 Automatic Voltage RegulatorDocument16 pagesLeroy Somer r448 Automatic Voltage RegulatorTauck Htun Linn100% (3)
- Modulo de Telefono FTM-1Document3 pagesModulo de Telefono FTM-1Andres Varea RomoNo ratings yet
- 05-1. Standard IO MapDocument5 pages05-1. Standard IO MapБахтияр ЮмачиковNo ratings yet
- Pasolink Neo C Manual GuidDocument86 pagesPasolink Neo C Manual GuidBeny NurmandaNo ratings yet
- Steval Ids001v2 SchematicDocument4 pagesSteval Ids001v2 SchematicDian Eko KuncoroNo ratings yet
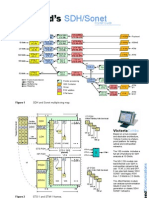
- SDH Multiplex Structure: SDH/SONET Transmission RatesDocument7 pagesSDH Multiplex Structure: SDH/SONET Transmission Ratesiqor valinhosNo ratings yet
- Traffic Light Management SystemDocument19 pagesTraffic Light Management SystemPurva new HambireNo ratings yet
- EM78P156ELDocument39 pagesEM78P156EL鄭建銘(小銘)No ratings yet
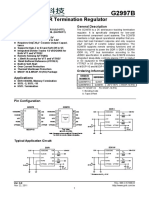
- DDR Termination Regulator: Features General DescriptionDocument1 pageDDR Termination Regulator: Features General DescriptionLina LinuNo ratings yet
- Config v.3.1 Revised)Document6 pagesConfig v.3.1 Revised)Andri Purnawan100% (1)
- 6325 rn017 1Document5 pages6325 rn017 1iaomsuet100% (1)
- TL1 Reference Guide - 323-1059-190.1.r16Document388 pagesTL1 Reference Guide - 323-1059-190.1.r16akrh125No ratings yet
- SILcet FORMULAS 5.0 Sample PDFDocument20 pagesSILcet FORMULAS 5.0 Sample PDFRabah AmidiNo ratings yet
- PTN 6300 Packet Transport Product Hardware IntroductionDocument39 pagesPTN 6300 Packet Transport Product Hardware IntroductionLovaNo ratings yet
- Samsung GT-i9505 Galaxy S4 00 01 02 03 04 05 PDFDocument36 pagesSamsung GT-i9505 Galaxy S4 00 01 02 03 04 05 PDFluiz232315No ratings yet
- Dial-Up Modem For Slc500 Operation Application Note # 6 ModemDocument4 pagesDial-Up Modem For Slc500 Operation Application Note # 6 Modemshawky2010No ratings yet
- SDH QuickDocument8 pagesSDH Quickvosyok1111No ratings yet
- Honeywell 51-52-33-134 - B5M8T2Document9 pagesHoneywell 51-52-33-134 - B5M8T2Anonymous NwnJNONo ratings yet
- Samsung Galaxy Tab S Sm-t805 Service ManualDocument184 pagesSamsung Galaxy Tab S Sm-t805 Service ManualIsaac Canul GNo ratings yet
- Update Stok WH NewDocument14 pagesUpdate Stok WH Newumar suksesNo ratings yet
- Autorizacion Onus en Olt Zte Via CliDocument2 pagesAutorizacion Onus en Olt Zte Via Cliyosi.suarezNo ratings yet
- SM J700F Cover 1Document48 pagesSM J700F Cover 1maribelNo ratings yet
- Siv - Microwave ProjectDocument32 pagesSiv - Microwave ProjectFahmi AbdullaNo ratings yet
- Linear-Gain-Lab PIC Protection v1.1Document9 pagesLinear-Gain-Lab PIC Protection v1.1wowan qwestNo ratings yet
- Samsung GT-S5570 Galaxy Mini Service ManualDocument93 pagesSamsung GT-S5570 Galaxy Mini Service ManualSerty Desck100% (1)
- Comparison Between All Four EnginesDocument5 pagesComparison Between All Four EnginesVikramjeet BanerjeeNo ratings yet
- Engine Simulator Board V1.4 ManualDocument7 pagesEngine Simulator Board V1.4 ManualKi Rekso Aljero50% (2)
- SITE INTEGRATION - LMT GuideDocument23 pagesSITE INTEGRATION - LMT Guideaslam_326580186No ratings yet
- EN For August 7, 2015 - REBD0002Document10 pagesEN For August 7, 2015 - REBD0002Sergio Ramos RiveraNo ratings yet
- MAX1232 Microprocessor Monitor: General Description FeaturesDocument8 pagesMAX1232 Microprocessor Monitor: General Description FeaturesFatih YILDIRIMNo ratings yet
- 03 - GPON - Basic Command OLT ZTE - NETWORKING - FROMDocument14 pages03 - GPON - Basic Command OLT ZTE - NETWORKING - FROMRonaldo YoupLoadNo ratings yet
- APM9926/C: Features ApplicationsDocument11 pagesAPM9926/C: Features ApplicationsMorteza BaratzadehNo ratings yet
- Emanagebasicoperation PDFDocument23 pagesEmanagebasicoperation PDFanthony dizonNo ratings yet
- Treasure Link Technology LTD.: TL995-C15 Dual Tone Door ChimeDocument2 pagesTreasure Link Technology LTD.: TL995-C15 Dual Tone Door ChimeAlberto LimónNo ratings yet
- Mixed Signal Microcontroller: FeaturesDocument70 pagesMixed Signal Microcontroller: Featureslordrichard117No ratings yet
- Power Suply Mac WT7515Document11 pagesPower Suply Mac WT7515Wade DyerNo ratings yet
- Arm Mini: Quick Start ManualDocument37 pagesArm Mini: Quick Start ManualFuture TechnovationNo ratings yet
- 1830Pss-32 R3.6.0 Level 2 Certification Local Test & IntegrationDocument41 pages1830Pss-32 R3.6.0 Level 2 Certification Local Test & IntegrationJonatan SoaresNo ratings yet
- 2A DDR Bus Termination Regulator: Features General DescriptionDocument1 page2A DDR Bus Termination Regulator: Features General DescriptionBhadreshkumar SharmaNo ratings yet
- Pepper Mill Power BoardDocument2 pagesPepper Mill Power BoardDaniel DunnNo ratings yet
- RT9198, Rt9198aDocument19 pagesRT9198, Rt9198aJesusRiveroNo ratings yet
- R6672 Script Generator (5G Phase 2)Document175 pagesR6672 Script Generator (5G Phase 2)fahadNo ratings yet
- FSQ311Document24 pagesFSQ311zektorNo ratings yet
- STF24N60M2, Stfi24n60m2, STFW24N60M2Document18 pagesSTF24N60M2, Stfi24n60m2, STFW24N60M2DalasteriskNo ratings yet
- Radio NEC LiteDocument50 pagesRadio NEC LiteedgarlibanioNo ratings yet
- Laporan Progress Tunjungan TP6Document151 pagesLaporan Progress Tunjungan TP6YogatamaNo ratings yet
- Cmos Asynchronous Fifo 256 X 9, 512 X 9 and 1,024 X 9 IDT7200L IDT7201LA IDT7202LADocument14 pagesCmos Asynchronous Fifo 256 X 9, 512 X 9 and 1,024 X 9 IDT7200L IDT7201LA IDT7202LAnevdullNo ratings yet
- TPS53219A 3-V To 28-V Input, D-CAP, Eco-Mode™, Synchronous Buck ControllerDocument36 pagesTPS53219A 3-V To 28-V Input, D-CAP, Eco-Mode™, Synchronous Buck ControllerGus Khoir SrNo ratings yet
- Tps 53014Document27 pagesTps 53014nebiyu mulugetaNo ratings yet
- Create Windows Forms With C#Document186 pagesCreate Windows Forms With C#Jaider Xavier JuniorNo ratings yet
- Ma Information-Technology-120 en Fs str0cc OccffhDocument263 pagesMa Information-Technology-120 en Fs str0cc OccffhEric KOLONo ratings yet
- V90 TravelToFixedStop S-Mode DOC enDocument15 pagesV90 TravelToFixedStop S-Mode DOC enmanuelsaurioNo ratings yet
- Ir Advance C7260 Brochure EN Europe PDFDocument4 pagesIr Advance C7260 Brochure EN Europe PDFThalex HoyiNo ratings yet
- Attention Is All You Need-Summary by Meghana BDocument2 pagesAttention Is All You Need-Summary by Meghana BMeghana BezawadaNo ratings yet
- Assignment # 02: Fatima Jinnah Women UniversityDocument13 pagesAssignment # 02: Fatima Jinnah Women UniversityLucky Asr AwaisNo ratings yet
- Lecture 04 Classes Part IDocument32 pagesLecture 04 Classes Part IUmer BeshirNo ratings yet
- 8086 Microprocessor Linking and RelocationDocument18 pages8086 Microprocessor Linking and RelocationSasirekha KosalramNo ratings yet
- Informatics 122 Software Design II: Emily NavarroDocument47 pagesInformatics 122 Software Design II: Emily Navarrojwala reddyNo ratings yet
- On Green HouseDocument20 pagesOn Green HouseGanesh MachaNo ratings yet
- Chapter 2-Operating System OverviewDocument3 pagesChapter 2-Operating System OverviewAbdirahin AbdirahimNo ratings yet
- Practice Test GR 11Document2 pagesPractice Test GR 11Prateek Goyal Computer5No ratings yet
- Week 9 ActivityDocument3 pagesWeek 9 Activitykashinath.kbNo ratings yet
- Fundamental of Information Technology (Pgdcca)Document4 pagesFundamental of Information Technology (Pgdcca)rupeshdahake0% (1)
- Aws Observability Handbook ApplicationsDocument504 pagesAws Observability Handbook ApplicationsscribdGMMEGANo ratings yet
- Open Location ConverterDocument3 pagesOpen Location ConverterpiokNo ratings yet
- Flag Register of 8086 MicroprocessorDocument4 pagesFlag Register of 8086 Microprocessor211902020No ratings yet
- TMSCryptoDocument5 pagesTMSCryptoRaga SilinapasNo ratings yet
- TOPCNC TC55V Instruction Manual: TOPCNC Automation Technology Co., Ltd. Felicia JiaDocument13 pagesTOPCNC TC55V Instruction Manual: TOPCNC Automation Technology Co., Ltd. Felicia Jiaanhthong3kNo ratings yet
- Online Gift ShopDocument10 pagesOnline Gift ShopmumarNo ratings yet
- Practical Python Programming: Charlene - Nielsen@Ualberta - Ca May 23Rd and 24Th, 2013 9:00 A.M. To 12:00 Noon Biosci B118Document74 pagesPractical Python Programming: Charlene - Nielsen@Ualberta - Ca May 23Rd and 24Th, 2013 9:00 A.M. To 12:00 Noon Biosci B118derejeNo ratings yet
- DR Husari Control NotesDocument149 pagesDR Husari Control NotesFiras QasemNo ratings yet
- Profinet User Guide v1.00920 PDFDocument12 pagesProfinet User Guide v1.00920 PDFFernandaNo ratings yet
- Aritificial Eye - MergedDocument37 pagesAritificial Eye - Mergedchappidi anushaNo ratings yet
- 002 - Introduction To The GPON ONU Series Products (MA5620&5626)Document66 pages002 - Introduction To The GPON ONU Series Products (MA5620&5626)Mohammad MohammadNo ratings yet
- Brian Kernighan and Dennis Ritchie - The C Programming Language-Prentice Hall PTR (1988)Document289 pagesBrian Kernighan and Dennis Ritchie - The C Programming Language-Prentice Hall PTR (1988)AjdernizNo ratings yet
- Batch Controller BCT-775: Process Control InstrumentationDocument2 pagesBatch Controller BCT-775: Process Control InstrumentationSunil MittalNo ratings yet
- Pure Script BookDocument232 pagesPure Script Bookanon_938817900No ratings yet
- Executive Dinner 2023 - Attendee List - To SentDocument12 pagesExecutive Dinner 2023 - Attendee List - To SentcavalansmNo ratings yet
- OG 7200seriesDocument11 pagesOG 7200seriesmahmoudrmmNo ratings yet