You might also like
- Lecture Notes 2Document4 pagesLecture Notes 2Aswathy CjNo ratings yet
- Sec 10.1 042020Document11 pagesSec 10.1 042020efril estradaNo ratings yet
- 2-1 - Vectors and Tensors - Lesson2-1Document18 pages2-1 - Vectors and Tensors - Lesson2-1emmanuel FOYETNo ratings yet
- S&S - Week 12Document29 pagesS&S - Week 12machasong98No ratings yet
- DRAFT UNIT #2 Class 09 & 10 On 07aug2018 ORBITS-continuedDocument128 pagesDRAFT UNIT #2 Class 09 & 10 On 07aug2018 ORBITS-continuedKnvpavankalyan SunnyNo ratings yet
- 2D TransformationDocument91 pages2D Transformationvishwajeet patilNo ratings yet
- Unit 5 - part-II VectorDocument18 pagesUnit 5 - part-II Vectorbugsme1234No ratings yet
- Lecture 5: Transforms, Fourier and WaveletsDocument38 pagesLecture 5: Transforms, Fourier and WaveletsChou AIBNo ratings yet
- MolecularGeometryandPointGroups 002Document46 pagesMolecularGeometryandPointGroups 002Herwana HermanNo ratings yet
- Permutation PresentationDocument14 pagesPermutation PresentationHuma KhanNo ratings yet
- Slide Chapter 1Document74 pagesSlide Chapter 1Sagar ChaulagaiNo ratings yet
- Chapter3-Two Dimensional TransformationsDocument52 pagesChapter3-Two Dimensional TransformationsPriyadarshini PatilNo ratings yet
- KinematicsDocument83 pagesKinematicsKartik KumarNo ratings yet
- Topic5 Linear TransformationsDocument25 pagesTopic5 Linear TransformationsFilipus Boby Setiawan BudimanNo ratings yet
- 8.sphere, Cone and CylinderDocument13 pages8.sphere, Cone and CylinderPratyush SrivastavaNo ratings yet
- Rotational MotionDocument4 pagesRotational MotionHasib AhmedNo ratings yet
- Me Math 8 q1 0301 PsDocument23 pagesMe Math 8 q1 0301 PsSeb GanaraNo ratings yet
- Topik 5: Dinamika Benda Titik Gaya Dan PercepatanDocument4 pagesTopik 5: Dinamika Benda Titik Gaya Dan PercepatanDhedhe PrasetyaNo ratings yet
- ME-210 Engineering Dynamics: Dr. Tayyab Zafar Tayyab - Zafar@ceme - Nust.edu - PKDocument31 pagesME-210 Engineering Dynamics: Dr. Tayyab Zafar Tayyab - Zafar@ceme - Nust.edu - PKAbdullah JavaidNo ratings yet
- Fixed Point TheoryDocument59 pagesFixed Point TheorykrpNo ratings yet
- Notes On Relativistic Quantum Field Theory: A Course Given by Dr. Tobias OsborneDocument97 pagesNotes On Relativistic Quantum Field Theory: A Course Given by Dr. Tobias Osbornedaniel_teivelisNo ratings yet
- Unit-IV - Differential Geometry Unit-IV - Differential GeometryDocument13 pagesUnit-IV - Differential Geometry Unit-IV - Differential GeometrysathishsowmyaNo ratings yet
- L4 - II Computer GraphicsDocument21 pagesL4 - II Computer GraphicsروابيNo ratings yet
- Real Analysis I: Course Code MTH 321 by Dr. Moiz Ud Din Khan Professor of MathematicsDocument26 pagesReal Analysis I: Course Code MTH 321 by Dr. Moiz Ud Din Khan Professor of Mathematicsinfiniti786No ratings yet
- Level Curves of Functions of Two VariablesDocument34 pagesLevel Curves of Functions of Two VariablesReethikaNo ratings yet
- CG Unit 2Document113 pagesCG Unit 2kariaharsh5No ratings yet
- Fisika Dasar 1Document11 pagesFisika Dasar 1Laurencius Yanuar Aditya SinagaNo ratings yet
- Interkoneksi SistemDocument43 pagesInterkoneksi SistemDini Yasa IstiqomahNo ratings yet
- Lecture 3Document44 pagesLecture 3Huo ZimuNo ratings yet
- VII PT2 AK Worksheet 3.1703681295Document2 pagesVII PT2 AK Worksheet 3.1703681295DikshaNo ratings yet
- CH 04Document62 pagesCH 04emineNo ratings yet
- Emechanics M2Document13 pagesEmechanics M2ELISA LUNARNo ratings yet
- Momentum Space OperatorDocument12 pagesMomentum Space OperatorSri Vanaja S100% (1)
- Homogenous TransformationDocument5 pagesHomogenous TransformationDomjul KumzhiNo ratings yet
- Chapter 03Document72 pagesChapter 03Bảo Tín TrầnNo ratings yet
- Rigid Body Dynamics (I)Document53 pagesRigid Body Dynamics (I)John Pol IgagamaoNo ratings yet
- Polar Coordinates and CurvesDocument61 pagesPolar Coordinates and CurvesBetty Njeri MbuguaNo ratings yet
- Forward and Inverse KinematicsDocument41 pagesForward and Inverse KinematicsJorge CastilloNo ratings yet
- Pre Cal Topics ReviewDocument6 pagesPre Cal Topics ReviewKaren May GarataNo ratings yet
- Basic TransformationDocument10 pagesBasic TransformationsamNo ratings yet
- Exam 2 Skills ListDocument1 pageExam 2 Skills ListMichael Alexander HarrisNo ratings yet
- 2D TransformationsDocument56 pages2D Transformationsguptatulsi31No ratings yet
- C Math-104Document1 pageC Math-104Athar tajNo ratings yet
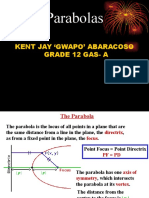
- 9.2 - Parabolas 1Document14 pages9.2 - Parabolas 1Shalengss OiccelNo ratings yet
- Fixed Point ThoremDocument21 pagesFixed Point ThoremsurajyellowkiteNo ratings yet
- Chapter 4 PDFDocument24 pagesChapter 4 PDFirusha100% (1)
- DLL Output 4 - WEEK 1, DAY 4Document6 pagesDLL Output 4 - WEEK 1, DAY 4Merlyn Del Rosario DeitaNo ratings yet
- Theory of Relativity: Unit 1Document45 pagesTheory of Relativity: Unit 1raNo ratings yet
- Week 2Document45 pagesWeek 2salim ucarNo ratings yet
- Circular MotionDocument12 pagesCircular Motionමේනුක සූවින්දNo ratings yet
- Understanding Quaternions From Modern AlDocument28 pagesUnderstanding Quaternions From Modern AlMárcio Martins da SilvaNo ratings yet
- Solving Equations: Direct and Inverse ProcessesDocument17 pagesSolving Equations: Direct and Inverse ProcessesshivamSRINo ratings yet
- 2020 XuDocument15 pages2020 XuTattuuArapovaNo ratings yet
- Week 1: Review Material: C David Berenstein 2009Document8 pagesWeek 1: Review Material: C David Berenstein 2009GNo ratings yet
- STD 11 Maths Paper 1 Maharashtra BoardDocument24 pagesSTD 11 Maths Paper 1 Maharashtra BoardKhushil100% (1)
- Image&Registra, On&based&on& Feature&matchingDocument63 pagesImage&Registra, On&based&on& Feature&matchinglaura torresNo ratings yet
- Differential Geometry - Gabriel Lugo (UNC) PDFDocument61 pagesDifferential Geometry - Gabriel Lugo (UNC) PDFJuanNo ratings yet
- Worksheet 5.1bDocument3 pagesWorksheet 5.1bNadia ImranNo ratings yet
- Haris Assignment 6Document9 pagesHaris Assignment 6Nadia ImranNo ratings yet
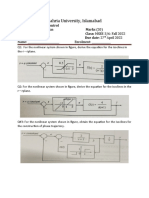
- This Assumption Is Valid Because Most of The Control Systems Behave As Low Pass FiltersDocument1 pageThis Assumption Is Valid Because Most of The Control Systems Behave As Low Pass FiltersNadia ImranNo ratings yet
- Worksheet 5.1aDocument3 pagesWorksheet 5.1aNadia Imran100% (1)
- Asg #4Document1 pageAsg #4Nadia ImranNo ratings yet
- Asg #3Document1 pageAsg #3Nadia ImranNo ratings yet
- Asg 1Document2 pagesAsg 1Nadia ImranNo ratings yet
- Lec - 3 Bisection MethodDocument31 pagesLec - 3 Bisection MethodNadia ImranNo ratings yet
- Asg #2Document1 pageAsg #2Nadia ImranNo ratings yet
- Lec 3 Mathematical ModelsDocument36 pagesLec 3 Mathematical ModelsNadia ImranNo ratings yet
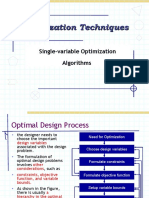
- Lec 2 Opt Problem FormulationDocument31 pagesLec 2 Opt Problem FormulationNadia ImranNo ratings yet
- Lec - 2 Single Variable Opt1Document22 pagesLec - 2 Single Variable Opt1Nadia ImranNo ratings yet
- Lec 1 Intro To OTDocument29 pagesLec 1 Intro To OTNadia ImranNo ratings yet
- Smith Predictor Best OneDocument6 pagesSmith Predictor Best OneNadia ImranNo ratings yet
- 2020 EntropyIF2.494Document27 pages2020 EntropyIF2.494Nadia ImranNo ratings yet
- Physiological Based Motor Control of Postural Balance: July 2019Document7 pagesPhysiological Based Motor Control of Postural Balance: July 2019Nadia ImranNo ratings yet
- Dynamic Three Segment SystemDocument3 pagesDynamic Three Segment SystemNadia ImranNo ratings yet
- Trajectory Calculation: Lab 2 Lecture NotesDocument4 pagesTrajectory Calculation: Lab 2 Lecture NotesDhillonvNo ratings yet
- CreepDocument211 pagesCreepAsif HameedNo ratings yet
- KBC 2016 Example 002Document6 pagesKBC 2016 Example 002C Y Lee (Keith)No ratings yet
- LN Tme240 PDFDocument96 pagesLN Tme240 PDFSsheshan Pugazhendhi100% (1)
- Journal of Cranio-Maxillo-Facial Surgery: Abhay Datarkar, Shikha Tayal, Abhishek Thote, Manlio GalieDocument7 pagesJournal of Cranio-Maxillo-Facial Surgery: Abhay Datarkar, Shikha Tayal, Abhishek Thote, Manlio GalieDIOGENESNo ratings yet
- Basics of Mechanical Engineering:: Integrating Science, Technology and Common SenseDocument142 pagesBasics of Mechanical Engineering:: Integrating Science, Technology and Common SenseNeville TamNo ratings yet
- Pier Pile Cap DesignDocument5 pagesPier Pile Cap DesigndulancivilNo ratings yet
- 02 Taylors Tool Life Problems UpdatedDocument2 pages02 Taylors Tool Life Problems Updated19G133 VASANTH B100% (1)
- 18 Civ 142Document3 pages18 Civ 142Ayushman RaiNo ratings yet
- 3D Heat Conduction Equation DriverationDocument3 pages3D Heat Conduction Equation Driverationルウィンコ オーNo ratings yet
- Forces Lecture NotesDocument27 pagesForces Lecture NotesThanh ChươngNo ratings yet
- Material TechnologyDocument46 pagesMaterial TechnologyVarunNo ratings yet
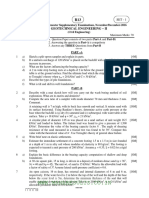
- WWW - Manaresults.Co - In: Geotechnical Engineering - IiDocument1 pageWWW - Manaresults.Co - In: Geotechnical Engineering - IimaheshNo ratings yet
- P-Delta Analysis of Multi Story RC Building: Rajath R T, M RamegowdaDocument4 pagesP-Delta Analysis of Multi Story RC Building: Rajath R T, M RamegowdaEngVuthyNo ratings yet
- Grade 11 Physical Science Finals ExamDocument3 pagesGrade 11 Physical Science Finals ExamHendrix Antonni Amante100% (1)
- Introduction To Mechanical: Workshop 3.1Document13 pagesIntroduction To Mechanical: Workshop 3.1Mario JelečNo ratings yet
- Resistance CalculationDocument111 pagesResistance CalculationRajesh Kumar Reddy0% (1)
- Machine Dynamics: Basic KnowledgeDocument2 pagesMachine Dynamics: Basic KnowledgePaul McNo ratings yet
- Chapter Two: 2.coupling, Clutch & BrakeDocument79 pagesChapter Two: 2.coupling, Clutch & BrakeEskinder Markos Official ChannelNo ratings yet
- Kami Export - Newtons First Law Review Worksheet 1Document2 pagesKami Export - Newtons First Law Review Worksheet 1Braulio Dario HernandezNo ratings yet
- HWIDocument2 pagesHWIJo ToddNo ratings yet
- Displacement MethodDocument16 pagesDisplacement MethodnunpluggedNo ratings yet
- U-Shaped Bolts Fracture Failure Analysis: SciencedirectDocument6 pagesU-Shaped Bolts Fracture Failure Analysis: SciencedirectFarshid TabatabaeeNo ratings yet
- Mcqs On HeatDocument13 pagesMcqs On HeatParshantKumarBajajNo ratings yet
- Hooke's LawDocument5 pagesHooke's Law123No ratings yet
- PHY210Document10 pagesPHY210AhceRah PidaUhNo ratings yet
- SDocument16 pagesSKumar KoteNo ratings yet
- Physics, Paper-I: Part-IiDocument3 pagesPhysics, Paper-I: Part-IiUmer 981No ratings yet
- IPhO41 Theory Problem 1 EnglishDocument3 pagesIPhO41 Theory Problem 1 EnglishrappycatNo ratings yet
- Study of Soil Structure Interaction On RCC BuildingDocument5 pagesStudy of Soil Structure Interaction On RCC BuildingInternational Journal of Innovative Science and Research TechnologyNo ratings yet