You might also like
- 3.coordinate Systems and TransformationsDocument44 pages3.coordinate Systems and TransformationsOlcay KılıçkoçNo ratings yet
- 2D & 3D TransformationsDocument26 pages2D & 3D TransformationsaruNo ratings yet
- Computer Graphics Lecture 6-7Document74 pagesComputer Graphics Lecture 6-7Qazi ShaikhNo ratings yet
- 2d TransformationsDocument47 pages2d TransformationsDevesh SharmaNo ratings yet
- Computer Vision - Transformations, Imaging Geometry and Stereo VisionDocument64 pagesComputer Vision - Transformations, Imaging Geometry and Stereo VisionRobe SolomonNo ratings yet
- Lecture 9: Matrix Operations For OpenglDocument71 pagesLecture 9: Matrix Operations For Openglfrank musaNo ratings yet
- Lecture 2 StudentsDocument73 pagesLecture 2 StudentszaidNo ratings yet
- 课件1Document17 pages课件1Alex WangNo ratings yet
- Ls 1Document26 pagesLs 1Anlimi ThaNo ratings yet
- CAP4730: Computational Structures in Computer GraphicsDocument47 pagesCAP4730: Computational Structures in Computer GraphicsAshik A NezzilianzNo ratings yet
- CAP4730: Computational Structures in Computer GraphicsDocument47 pagesCAP4730: Computational Structures in Computer GraphicsAdityasinh DesaiNo ratings yet
- CAP4730: Computational Structures in Computer GraphicsDocument47 pagesCAP4730: Computational Structures in Computer GraphicsSahib SodhiNo ratings yet
- Inertial Measurement Units II: Gordon Wetzstein! Stanford University!Document37 pagesInertial Measurement Units II: Gordon Wetzstein! Stanford University!mNo ratings yet
- Geometric TransformationDocument8 pagesGeometric TransformationDaljeet SinghNo ratings yet
- Analytical AT-3Document48 pagesAnalytical AT-3BELAY TAFACHUNo ratings yet
- 9 - ParameterizationDocument48 pages9 - Parameterizationandriusjaya787No ratings yet
- Geometric TransformationsDocument40 pagesGeometric TransformationsidheivyaNo ratings yet
- 2D/3D Geometric Transformations: CS485/685 Computer Vision Dr. George BebisDocument40 pages2D/3D Geometric Transformations: CS485/685 Computer Vision Dr. George BebisAmudha SenthilNo ratings yet
- 2D/3D Geometric Transformations: CS485/685 Computer Vision Dr. George BebisDocument40 pages2D/3D Geometric Transformations: CS485/685 Computer Vision Dr. George BebisProgrammer KhNo ratings yet
- Topic5 Linear TransformationsDocument25 pagesTopic5 Linear TransformationsFilipus Boby Setiawan BudimanNo ratings yet
- Final 2D Transformations Heran Baker NewDocument64 pagesFinal 2D Transformations Heran Baker NewImmensely IndianNo ratings yet
- Unit - III 2D-TransformationDocument48 pagesUnit - III 2D-Transformationpankajchandre30No ratings yet
- Lecture4 Single View MetrologyDocument64 pagesLecture4 Single View MetrologyTim LeeNo ratings yet
- Day 3 - Single Image OrientationDocument22 pagesDay 3 - Single Image OrientationAarthi shreeNo ratings yet
- 3D Transformation PDFDocument23 pages3D Transformation PDFshivam007100% (1)
- CAP4730: Computational Structures in Computer GraphicsDocument33 pagesCAP4730: Computational Structures in Computer GraphicsFarid Ali MousaNo ratings yet
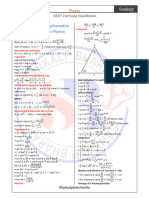
- Physics Formula HandbookDocument54 pagesPhysics Formula Handbook3198chethaNo ratings yet
- Image Transformations: Image Filtering: Change Range of ImageDocument64 pagesImage Transformations: Image Filtering: Change Range of Imagehyfkyhj ;mnk,.No ratings yet
- Rigid Body MotionsDocument17 pagesRigid Body Motionsusama tariqNo ratings yet
- Kinematics ConceptsDocument41 pagesKinematics ConceptsHannan ShahNo ratings yet
- CG 2d TransDocument41 pagesCG 2d TranssanchitahiwraleNo ratings yet
- Easy Rivision For NeetDocument54 pagesEasy Rivision For NeetRaja420No ratings yet
- Teoria Mates NSDocument19 pagesTeoria Mates NSnicolasNo ratings yet
- 14.camera CalibrationDocument25 pages14.camera CalibrationUsman MaqboolNo ratings yet
- Transformations 1Document32 pagesTransformations 1KrishnaNo ratings yet
- Chapter 4 - 2 - Dimensional Geometric TransformationsDocument31 pagesChapter 4 - 2 - Dimensional Geometric TransformationsTanveer Ahmed HakroNo ratings yet
- Signal Space RepresentationsDocument35 pagesSignal Space RepresentationsHuy NguyenNo ratings yet
- Mee307 Cad/Cam: Dr. A.S.Sheytrabalan (Asso - Prof) SmbsDocument32 pagesMee307 Cad/Cam: Dr. A.S.Sheytrabalan (Asso - Prof) SmbsSrivathson EswaranNo ratings yet
- CAP4730: Computational Structures in Computer Graphics 2D TransformationsDocument47 pagesCAP4730: Computational Structures in Computer Graphics 2D Transformationssukhdev0887No ratings yet
- Geometric Image Transformations: Part OneDocument28 pagesGeometric Image Transformations: Part OneRijo Jackson TomNo ratings yet
- 2D Geometric TransformationsDocument21 pages2D Geometric TransformationsRajaRaman.GNo ratings yet
- CAED KJHA 2d TransformationDocument114 pagesCAED KJHA 2d TransformationAnu SinghNo ratings yet
- AGE 212: Mathematics Iii: Luanar 2014/2015 Academic Year Lecturer: Wellam KamthunziDocument98 pagesAGE 212: Mathematics Iii: Luanar 2014/2015 Academic Year Lecturer: Wellam KamthunziDonald NgalawaNo ratings yet
- CAD GM KJHA 2d TransformationDocument91 pagesCAD GM KJHA 2d TransformationAnu SinghNo ratings yet
- Vision 7CameraModelA S09Document28 pagesVision 7CameraModelA S09Kartik DuttaNo ratings yet
- Points and Planes in 3DDocument30 pagesPoints and Planes in 3DAbsarNo ratings yet
- OK Geometria Clase 17 Mayo 2016Document30 pagesOK Geometria Clase 17 Mayo 2016EmmanuelGarduñoTéllezNo ratings yet
- NFVtb3NDbHJOVk94Q0JuODFJV0I2UHN0VUpUdXJ5eWpWRXc0SzdqcklLTQMathematics I Week 1Document14 pagesNFVtb3NDbHJOVk94Q0JuODFJV0I2UHN0VUpUdXJ5eWpWRXc0SzdqcklLTQMathematics I Week 1a21a21911aNo ratings yet
- AB1202 Statistics and AnalysisDocument16 pagesAB1202 Statistics and AnalysisxtheleNo ratings yet
- MTK 3 Sistem KoordinatDocument74 pagesMTK 3 Sistem KoordinatYunita FawzyahNo ratings yet
- Geom 3 DDocument13 pagesGeom 3 DRendi Adi FebrianNo ratings yet
- Cim 23.6Document81 pagesCim 23.6RajeshKumarNo ratings yet
- CST 304 - Computer Graphics: 2D TransformationsDocument34 pagesCST 304 - Computer Graphics: 2D TransformationsMalu VavuNo ratings yet
- Lecture16 StereoDocument41 pagesLecture16 StereoKarthik UppuluriNo ratings yet
- 5 TransformationsDocument66 pages5 TransformationsPratik MalviyaNo ratings yet
- Image Warping: 15-463: Computational Photography Alexei Efros, CMU, Fall 2005Document34 pagesImage Warping: 15-463: Computational Photography Alexei Efros, CMU, Fall 2005xolraxNo ratings yet
- Week 14 - RevisionOutline - 2122Document22 pagesWeek 14 - RevisionOutline - 2122俄狄浦斯No ratings yet
- Introduction To Computer Graphics CS 445 / 645: TransformationsDocument52 pagesIntroduction To Computer Graphics CS 445 / 645: TransformationsVasantha Kumar .VNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- CH 22Document110 pagesCH 22ChristopherNo ratings yet
- Chapter 19Document12 pagesChapter 19Ali AbdullahNo ratings yet
- Space TrussDocument29 pagesSpace TrussPrashant PalNo ratings yet
- Pierre Francastel and Derek Aiken - Criticism and The History of Painting in The Twentieth CenturyDocument10 pagesPierre Francastel and Derek Aiken - Criticism and The History of Painting in The Twentieth CenturyXUNo ratings yet
- Example of Teacher Made TestDocument5 pagesExample of Teacher Made Testangelic riveraNo ratings yet
- Sex Zones: Intimacy, Citizenship and Public SpaceDocument22 pagesSex Zones: Intimacy, Citizenship and Public SpaceValeria PérezNo ratings yet
- Seliss 10 Chapter 20Document29 pagesSeliss 10 Chapter 20Ayushman Dutta ThakurNo ratings yet
- Grade 10 Math ReviewDocument7 pagesGrade 10 Math ReviewnobNo ratings yet
- Radian - Wikipedia, The Free EncyclopediaDocument7 pagesRadian - Wikipedia, The Free Encyclopediaonc30187No ratings yet
- Date: 09-01-2019: Chater # 7 VECTORS (7.1 - 7.3)Document2 pagesDate: 09-01-2019: Chater # 7 VECTORS (7.1 - 7.3)MashaviaNo ratings yet
- LA Assignment 3 PDFDocument4 pagesLA Assignment 3 PDFvinayNo ratings yet
- Applied - Physics - Notes 1Document248 pagesApplied - Physics - Notes 1Ashutosh SinghNo ratings yet
- Strain PDFDocument18 pagesStrain PDFAulia Kurnia HadyNo ratings yet
- CHM 3107 Assignment 1Document7 pagesCHM 3107 Assignment 1Trimal AccraNo ratings yet
- Denavit-Hartenberg Parameters - WikipediaDocument19 pagesDenavit-Hartenberg Parameters - Wikipediavikas16051998No ratings yet
- Functional Analysis Master PDFDocument107 pagesFunctional Analysis Master PDFrapsjadeNo ratings yet
- Abelian Varieties, Theta Functions and The Fourier Transform PDFDocument307 pagesAbelian Varieties, Theta Functions and The Fourier Transform PDFAmeyNo ratings yet
- Gurukul Bharat Dpp:-Complex No: (Problems Based On Fundamentals)Document7 pagesGurukul Bharat Dpp:-Complex No: (Problems Based On Fundamentals)Kumar AtthiNo ratings yet
- 2021 S4 Emath (Bring Home Exam) Emath Test 1Document12 pages2021 S4 Emath (Bring Home Exam) Emath Test 1George ChooNo ratings yet
- Atmospheres of Space The Development of Alvar Aalto S Free Flow Section As A Climate DeviceDocument18 pagesAtmospheres of Space The Development of Alvar Aalto S Free Flow Section As A Climate DeviceSebastian BaumannNo ratings yet
- Unit05 8 Orthographic Projection ExercisesDocument18 pagesUnit05 8 Orthographic Projection ExercisesRahul GuptaNo ratings yet
- Math Linear AlgebraDocument5 pagesMath Linear AlgebraAnanya JainNo ratings yet
- Hilbert EngDocument6 pagesHilbert EngRaphaelNo ratings yet
- Analogy BW Vector ND SignalsDocument7 pagesAnalogy BW Vector ND Signalsgaurav_juneja_450% (2)
- 04 Handout 12 PDFDocument6 pages04 Handout 12 PDFNial HoerunNo ratings yet
- Dealing With Coordinate SystemsDocument9 pagesDealing With Coordinate SystemsEliminated ProNo ratings yet
- Kinematics FREE WORKSHEET/QUESTION BANK BY ANURAG TYAGI CLASSES (ATC)Document3 pagesKinematics FREE WORKSHEET/QUESTION BANK BY ANURAG TYAGI CLASSES (ATC)ANURAG TYAGI100% (2)
- Unit 6 TrigonometryDocument18 pagesUnit 6 TrigonometryRonny JazakoNo ratings yet
- Math 55 Probset 2Document1 pageMath 55 Probset 2John Paulo Dela CruzNo ratings yet
- Lattice Positions, Directions, and PlanesDocument25 pagesLattice Positions, Directions, and PlanesIan Von ArandiaNo ratings yet