Professional Documents
Culture Documents
Motor Skill 1991
Uploaded by
Five DuteOriginal Description:
Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Motor Skill 1991
Uploaded by
Five DuteCopyright:
Available Formats
Movement Science Series
Motor Skill Acquisition
The purpose of this article is to provide a framework for understanding motor
skill and the process by which it is acquired. A selective historical overview ispre-
sented to demonstrate how the study of movement is a necessary preliminary to
the study of motor skill learning. The phenomenon of skill is explored as a n in-
herentfeature of goal-directed olganisms whose effectivefunctioning depends o n
achieving a degree of competence in solving problems that are encountered in the
everyday world. The relationship between problems and solutions is discussed.
Movement is examined as a problem-solving tool and as the means by which the
individual expresses skill. Factors that influence the individual's level of skill are
fully explored, along with the implications for functional behavior. The creative
use of resources in problem solving is thoroughly examined, and tasks are dis-
cussed in t e r n of the demands imposed o n the individual. [HigginsS. Motor skill
acquisition. Pbys Ther. 1991;71:123-139.1
Key Words: Learning, Motor skills, Problem solving.
Historical Overview the analysis of movement was consid- Gentile's1 article was shortly followed
ered the province of kinesiologists by an influential article by Schmidt.14
It would be safe to say that the issue and biomechanists. The study of Schmidt, influe~cedby Adams,l5 pro-
of learning has not been addressed by learning was largely restricted to the posed a schema theory of motor
movement scientists in any systematic study of the outcomes of movement learning that was, in part, to take the
way since the early 1970s. At that (ie, speed, accuracy, movement time, field in the direction of examining the
time, a seminal article by Gentile1 reaction time) rather than on the pro- underlying processes supporting the
appeared that addressed learning cess by which these outcomes were production of movement that was
from an interactional point of view, produced. The focus of Gentile's arti- considered a derivative of a centrally
that is, one that examined learning as cle was on understanding movement represented and generalizable motor
a function of the interaction of the as it becomes organized and differen- program. (The work of Keele,16 Stel-
individual and the environment in the tiated in varying environmental con- mach,l7 and Marteniuk18 was also con-
pursuit of goal attainment. (Gentile1 texts (which she called "open" and sidered influential in this regard.) The
was influenced by the earlier works "closed" environments after Poul- work of this period marked the entry
of such psychologists of skill as Bart- ton4). Motor skill acquisition was of the field of motor learning into an
lett,2 Welford? P ~ u l t o nConnolly,5
,~ viewed as a stage-related process di- intense focus on understanding move-
Whiting,6 Bilodeau,7 Kay? Cratty,9 rected toward the understanding of ment itself and on understanding is-
Fitts,loHenry and Rogers,ll Henry,12 the goal and the subsequent develop- sues of control.
and Adams13) Gentile's article offered ment of an information-based motor
a framework for studying not only plan and motor response that suited Considered polemical at the time,
learning, but movement in relation- the attainment of the goal. because of its departure from the en-
ship to context-dependent, goal- trenched, strictly anatomical-
directed behavior. Prior to this time, biomechanical approach to the study
of movement, was a book by Hig-
gins.19 Influenced strongly by the
work of Bernstein,z0Higgins viewed
S Higgins, EdD, is Professor of Education and Director of the Program in Human Movement Stud- an individual's movement as a win-
ies, Department of Health and Physical Education, Hunter College of the City University of New dow into the underlying neural pro-
York, 695 Park Ave, New York, NY 10021 (USA).
48 / 123 Physical Therapy/Volume 71, Number 2 /February 1991
cesses supporting it. Distinctly dif- example, articles by Arend and Hig- in the environment, and of movement
ferent from the perspective of gins*l and Gentile and colleagues23). as a means for goals to be achieved,
kinesiologists and biomechanists, As a result of this work, a theoretically the field is again ready to address is-
movement was considered an exter- derived taxonomy of skill developed sues about learning. (See recent arti-
nal manifestation of the resolution of that allowed the co-analysis of context cles by Ger1tile3~and Jeka and Kelso39
interacting internal and external con- and movement. Movement differentia- addressing issues of learning from
straints surrounding its production. tion was analyzed as a function of differing, although overlapping,
Higgins sought to specify the factors, task; environmental condition; and perspectives.)
or "constraints" as he called them, nature of the postural, limb manipula-
influencing the organization and con- tory, and perceptual demands, given Purpose and Perspective
trol of movement, again from an in- any number of variables (see articles
teractional,point of view, and pro- by HigginsZ4and Higgins and This article offers a framework, along
posed a model for the multi- Spaeth25). with exemplary references, for view-
dimensional analysis of movement ing movement as the means by which
(also see article by Arend and It took nearly 20 years to develop a problems are solved, for viewing skill
HigginsZ1). viable integrative framework for the as the degree of effectiveness in the
study of motor skill (which, of course, deployment of movement, and for
The study of movement, both as a is still evolving). During that time, viewing learning as context-
process arid as a product, became the many movement scientists were at- dependent problem solving. The view
essential focus of the field. Movement tracted to the ecological perspective presented, although essentially a dy-
was examined as the means by which offered by Gibsonz6for the study of namical system's approach, is often an
the individual interacts within the en- perceptual processes. There was an amalgam of ideas and findings of
vironment and as a product of the interest in developing parallels for many researchers and theoreticians
processes underlying movement. At- viewing goal-directed adaptive move- who have contributed to our under-
tempts were made to examine pro- ment in a similar and inclusive vein. standing of movement and learning
cesses that were viewed to deal with That viewpoint allowed the study of over the past 20 years. Reference to
the environmental, morphological, movement as an emergent property their work does not imply agreement
and biomechanical constraints sur- of the organism, based on the extrac- with their perspective, but rather is
rounding a particular goal-directed tion of information from pertinent intended to encourage the reader to
performance. The study of learning sources rather than an internally built seek out these important works as
was temporarily abandoned for want model of the world and responses to rich sources of ideas for practice.
of a better understanding of the rela- its conditions. Work in this direction
tionships that would have a direct was spearheaded by TurveyZ7and fur- The initial focus of the article will be
bearing on how learning could be ther developed by movement scien- to examine the relationship between
viewed: for example, relationships of tists and developmental psychologists problems and solutions-between
the individual to the world; of move- such as Kels0,~8Kugler et al,Z9 Thelen action, movement, and skill. The con-
ment to functional behavior; and of et a1,3O Thelen,3l von H0fsten,3~and cept of skillfulness will be fully ex-
neuromotor, musculoskeletal, biome- Goldfield.33 (See the special issue of plored and then used to discuss the
chanical, and environmental Human Movement Science3* for a phenomenon of learning as the acqui-
phenomena. selection of articles examining and sition of skill.
further extending the emergent view-
Perhaps the most important realiza- point and the special issue of Devel- Ultimately, as therapists, we are inter-
tion of this period was the impor- opmental Psychology35 for a selection ested in the development of compe-
tance of context and task in the orga- of articles applying a dynamical sys- tence, that is, how individuals become
nization of skillful movement. A tems approach to the study of motor effective problem-solvers at any point
systems perspective of human behav- development.) (or condition) in their lives, and on
ior was replacing an associationist how their degree of competence is
point of view, and paradigms were With the recent development of mod- reflected in their behavior and affects
being developed that could be ap- els for the study of self-organizing their function. Skill is viewed as a
plied to the study of behavior (see, systems (see especially works by form of competence (ie, as a degree
for example, such classical papers as Kelso and Schoner28 and Hake1-13~) of effectiveness), and skillful behavior
those presented at the Alpbach Sym- and the consideration of the role of is viewed as an application of the re-
posium in 196822).Skill and move- mental processes in the genesis of sources available to the individual for
ment, from this perspective, were m0vement,3~the explanatory power achieving goals. Learning is viewed as
viewed as dynamic, relative, and adap- of the emergent viewpoint regarding the process by which the individual
tive. In order to better define the rela- movement became a viable alternative organizes available resources, with
tionship o f the individual as problem to the more entrenched representa- reference to a specific problem, and
solver to the external world, a system- tional point of view. With a fuller un- gains control over that organization.
atic study of tasks ensued (see, for derstanding of the individual as actor
Physical Therapy /Volume 71, Number 2 /February 1991
In order to understand learning in understand what the problem or task individual and the e n v i r ~ n m e n t . ~ ~ ~ ~ ~
this context, one must view the indi- demands of the individual solving it In this sense, they can be considered
vidual as, by nature, a problem- and how the individual's resources as resources to the individual. At the
solving organism engaged in mean- are pertinent to the specific problem. same time, they may serve to con-
ingful interaction with the environ- strain our problem-solving behavior.
ment and possessing the capacity to Actions, Movement, and Skill Our pool of available actions is sub-
mars hall his o r her resources in ser- ject to change as the individual o r the
vice of adaptive behavior to varying Problems and actions. The prob- environment changes. For example,
degrees of effectiveness. Understand- lems we engage in may be viewed as with a particular trauma, "looking"
ing learning becomes a function of a goal to be achieved by the individ- may no longer be an available mode
understanding the interaction be- ual. These problems present a task(s), of interaction. If the individual wishes
tween problems and the available having an inherent set of demands, to to achieve the goals that demanded
resources of the individual and envi- the individual. The demands of the looking, an alternative @resumably
ronment. Importantly, the individual's problem specify the nature of the ac- equivalent) action would have to be
degree of effectiveness in the learning tivity that the individual will be in- marshalled in order for the goal to
process (and thus in problem solving volved in (a more specific analysis of remain viable. Similarly, the move-
in general) will be limited by his or task demands is provided later in this ment capabilities of the individual
her ability for critical self-analysis and article). may change, influencing the way in
environmental analysis in light of the which an action may be realized. For
problems encountered and by his or Attaining goals may involve many ac- example, a neck injury might alter the
her ability to generate and control the tions on the part of the individual, movement(s) used to enact the action
solutions to these problems. each subserving the demands of the of looking; however, the individual
task. For example, the goal of cross- can still accomplish the goal through
What Is Skill? ing the street poses demands that the act of looking. With a particular
specify the actions of orienting (eg, environmental condition, a particular
Skill may be viewed as an aspect of looking, listening, o r touching) and mode of interaction or movement
the ongoing function of an individual locomoting. The task demands match- may be more or less appropriate.
in his o r her daily encounters with ing one's solution to the movement These indeterminacies must be dealt
the world. A person's skill is his or or position of vehicles, pedestrians, with for us to be competent in our
her degree of competence in han- and traffic signals, and it demands an problem solving. That is, we learn to
dling those encounters." 'That is, skill excursion of the individual over the be consistent and reliable problem
is an individual's ability to consistently surface. Our actions describe an oper- solvers under indeterminant condi-
achieve a goal(s) under a wide variety ation on the environment (or on the tions-as a fact of life.
of conditions. Specific to the study of self in the environment) by the indi-
motor skill, the goals are considered vidual. Actions are realized, to varying Therapists (and teachers) often define
motor problems (ie, to lift a cup) that degrees of effectiveness, through goals and actions as motor skills that
are to be achieved by the execution movement. In this example, orienting the individual needs to acquire: dress-
of an appropriately organized move- might be realized through an eye/ ing, walking, driving a car. The attain-
ment. A person's motor skill is thus head movement and locomoting ment of the goal in these activities or
expressed by some level of control through a walking movement. skills requires an appropriately orga-
over goal-directed movement. The nized behavioral product. For motor
greater the ability to analyze prob- The particular action and the particu- skills, this behavioral product is a
lems and to marshal the resources to lar movement(s) that evolve during movement.
use movement as a problem-solving problem solving are context depen-
tool, the greater the degree of skill. dent and thus are indeterminate. For Movement and skill. Movements
example, the action of pushing sub- are the means by which motor prob-
We must study problems in order to serves many goals; however, the lems or motor skills are solved. A
understand skill. Problems are goals movement(s) used to enact the push movement is viewed as a kinematic
that arise as a function of an encoun- depend on the unique problem, the chain of motion having spatial and
ter between the individual and the state of the individual, and the state of temporal coherence relevant to the
surround, occurring under an infinite the environment at that time. Simi- task at hand. The structure of the
variety of conditions across a life-span. larly, the action of walking subserves movement is emergent, dynamic, and
Skill is the ability to solve problems many goals o r tasks. However, the responsive to the task, the individual,
with a degree of consistency and kinematic details of the walking and the environment (see article by
economy. To understand skill, we movements emerge as conditions Higgins43 for a full discussion of this
seek to understand the kinds of prob- unfold. issue). As the context of the task
lems that are encountered and the changes, so does the kinematic struc-
resources that are available to solve Actions may also be viewed as modes ture of the movement change.
them at any point in time. We seek to of available interaction between the
Physical Therapy/Volume 71, Number 2 /February 1991
The structure of the movement may If individuals are not capable of ganization of coherent movements to
be relatively stereotypical (ie, kine- movement as the organized behav- support it (eg, the control of eye
matically consistent) or nonstereotypi- ioral product, they cannot reflect o r movements for observing o r reading,
cal (junematically variable), depend- exercise their skill. This is an unlikely the control of the hand for explor-
ing on the problem and its context. and extreme case. Even quadriplegic atory touch).
Conttm refers to the momentarily individuals can reflect their skill by
effective environmental conditions organizing a movement response to Movement remains the ultimate re-
surrounding the problem and the solve problems-ven if their source to the individual and, to be
state of the individual at the time of problem-solving tool is limited to an effective, must be responsive to the
performance (ie, the constraints sur- eye movement. Skill is the effective context-specific demands of the task.
rounding performance). The nar- use of any behavioral product capa- Skillful movements are organized
rower the context, the narrower the ble of externally manifested action. products that are task-specific,well-
solution and the more consistent the timed, well-directed, conforming to
movement.ls25 The broader the con- If movements, be they kinematically constraints imposed by the morphol-
text, the broader the range of solu- consistent o r variable, are the means ogy of the indvidual and the environ-
tions and the less consistent the by which motor problems are solved, ment, exploitative of external forces,
movement. In both cases, the skill of the individual's capacity to produce and compensatory in their relation-
the individual lies in his o r her ability and control a wide range of move- ship among body segments. It is these
to consistently achieve the goal. In ments bears a direct relationship to characteristics of movement that con-
the narrow case, the goal may indeed the scope of his or her problem- cern us as facilitators of skill (ie, that
be a kinematically consistent move- solving capacity. That is, a larger field the movement be appropriate to the
ment (ie, a cartwheel). In the broad of tasks and solutions is potentially task and be effective in achieving the
case, the goal is anathema to a kine- available to the individual. It is as- goal in a way that is personally eco-
matically consistent movement; rather, sumed that an individual's potential to nomical and least likely to cause un-
the movement solutions are as varied produce and control movement and due stress or strain on the body).
as the contexts (eg, crossing a city the knowledge bases supporting this
street). (See chapter by Gentile38 for a behavior develop as a function of ge- Levels of Skill
full discussion of this issue.) netic and experiential history (see the
special issue of Quest4*devoted to the All movements represent a blend of
In the clinic, we are largely exposed issue of motor development). As facil- internal and external forces. Skillful
to narrowly defined tasks in con- itators of skill development, it be- movements approach an optimal
trolled environmental conditions with hooves us to enhance the movement blend; that is, a blend that is best
relatively stereotypical movements capabilities of the individual to the suited to the task at hand and to the
emerging as solutions. This is perhaps greatest extent possible because that individual and his o r her surround at
a necessary first step in the therapeu- would extend the individual's that point in time. The progressive
tic process, o r a final step if the con- problem-solving capacity. At the same incorporation of external forces into
ditions are severe. The study of skill, time, we should Edcilitate the develop- the organization of movement occurs
however, necessitates the examination ment of the cognitive and perceptual as a function of development and
and genesis of movement solutions in knowledge bases that support the learning. Bernstein20identified this
all contexts. As facilitators of skill, we meaningful organization of movement phenomenon and aptly called it "seiz-
must be prepared to develop inter- over a wide range of problems and a ing the moment of least resistance."
vention techniques that ensure suc- wide range of conditions.
cess in as many contexts as possible. Skillful movements, whether they are
Summary the movements that subserve percep-
In the real world, we encounter con- tion or those that subserve perfor-
texts that exist on a continuum of nar- Skill is one's degree of effectiveness mance, are well-organized move-
row to broad, and we must be effec- in achieving the goal using any appro- ments. Both the strategy supporting
tive in all of these contexts. An priate solution. It is a statement about the genesis of the movement and the
individual's overall skillfulness is eval- one's problem-solving capacity. For kinematic details of the movement are
uated by the ability to embrace all motor skills, it is a statement about well-adapted to the task. Skillful
contexts and all solutions. The skillful- one's degree of effectiveness in using movements achieve the goal with an
ness of the individual will be re- movement as a problem-solving tool. economy of effort (see articles by
flected in his o r her degree of effec- Skillful movements underly all forms Sparrow45 and Sparrow and Irigarry-
tiveness in using movement as a of behavior; that is, movements sub- Lopez46 for a more indepth discus-
problem-solving tool for any number serve both perceptual processes and sion). In order for an economy of
of tasks or in actions that are inherent performatory processes. Too often we effort to occur, it is necessary to mini-
in those tasks. forget that the active extraction of in- mize muscular effort and maximize
formation (exploratory-orienting be- the use of external power sources
havior) is also dependent on the or- when possible and when appropri-
Physical Therapy/Volume 71, Number
ate.43External power sources include restriction: Solving the problem with pists, parents, or peers can play a crit-
motive forces such as gravity, momen- an economy of effort implies that the ical role in influencing the level of
tum, friction, wind and water resis- highly skilled individual exhibits the skill that an individual attains (ie, by
tance, and ground-reaction forces. biomechanically and physiologically setting goals and standards of perfor-
With the well-timed incorporation of optimal solution. At high levels of mance). However, externally imposed
external power sources into the spa- skill, the individual is capable of in- standards have the potential to cause
tial and temporal organization of the corporating mechanical-reactive phe- conflict and a stressful o r unsuccessful
movement (eg, through summation of nomena with the organization of learning experience unless the in&-
forces o r transfer of momentum), an movement so that there is an optimal vidual accepts them as his or her
individual is able to minimize muscu- blend of internal and external forces own. Similarly, the therapist must ac-
lar effort. The individual must have (this issue is fully explored by Hig- cept the individual's standards o r
some idea (often intuitive knowledge) gins43). (Recent work by Sparrow and work toward some mutually agreeable
as to how external forces can be ex- Irigarry-Lopez46 =mines the optimi- and realistic goals. Ultimately, it is the
ploited and must have some idea as zation of physiological phenomena as individual who defines the degree of
to how to incorporate them within an aspect of efficiency. I would argue skill that is satisfactory for himself o r
the movement. The task-specific blend that efficient movement optimizes herself.
of internal and external forces needs psychological resources as well. Work
to be learned. is needed in this area.) If we view skill as a degree of effec-
tiveness in utilizing resources, skill
The implication is that skillful move- A lesser degree of skill could be char- level may, in part, be attributable to
ments, in addition to achieving the acterized by total inconsistency in the nature of the resources. Although
goal, do not waste energy. There is a achieving the goal, consistency under the resources may limit us, we can be
differential and well-timed allocation a few conditions, control over only a quite clever in our solutions, because
of tension to the musculature that is narrow range of means, o r using a skill is a product of the interaction of
appropriate to the task and context. large degree of effort. Most of us fall these resources. Thus, we can, within
Clearly, an individual's ability to orga- into this category. We are pretty good limits, make up for shortcomings by
nize a coherent kinematic chain of at many things, but must settle, for exploiting our strengths. The nar-
motion and to differentially control any number of reasons (be they cog- rower the task demands, the less flex-
the allocation of tension to the mus- nitive, morphological, o r sociocul- ibility the individual has in creative
culature is met with varying degrees tural), for performance that is short of resource usage and the more stereo-
of success. In any case, the individual highly skilled. No skill, however, is typical the solution. For people with
will marshal all available resources to not a viable alternative for a problem- severely limited resources, this might
solve the problem at hand. The goal solving organism. be a blessing or a hindrance-a bless-
may be achieved with varying degrees ing because they can learn a form of
of success and efficiency. People are, by nature, skillful-albeit participation, or a hindrance because
to varying degrees of effectiveness. the demands of the task in light of the
Skill exists along a continuum of ef- Their degree of effectiveness may be nature of their condition may pre-
fectiveness that is related to the de- limited by numerous factors: genetic clude their participation.
gree of consistency in the achieve- potential, cognitive ability, structural
ment of the goal and thus to the o r neuromotor characteristics, access Resources as Constraints and
ability to organize and execute a to a narrow range of movements, de- Aftordances
movement that suits the goal. The velopmental o r sociocultural history,
skillfulness of the individual is depen- psychological state, or, quite simply, What are these resources and how are
dent on his o r her creative utilization intent o r whim. With a lesser degree they developed? How can they be
of the pool of available resources. of skill, however, our flexibility in changed through training, learning, o r
problem solving and the range of morphological or environmental alter-
A high level of skill is characterized tasks accessible to us are limited. ations? How does the task interact
by a high degree of consistency in with the selective organization of re-
achieving the goal. This skill level im- The degree of skill we attain on most sources? How are they mutually limit-
plies that the individual can achieve tasks is generally to the satisfaction of ing? Can an individual understand his
the goal under a wide variety of con- the individual within constraints im- o r her resources? By what means, and
ditions. Because any change in condi- posed by cognitive, morphological, o r to what extent? How can we view re-
tion precipitates a change in some sociocultural factors. That is, although sources as a knowledge base, and
element(s) of the solution, a high de- we may wish to be or know we can how might we expand that base?
gree of skill implies an ability to di- be more skillful on a particular task,
versify o r generalize o r spontaneously we may not wish to devote the time Resources are the morphological and
create the means (the movement); it and energy needed to achieve such a psychological characteristics of the
implies using any appropriate variety level. We thereby settle for a level that individual, the structural characteris-
of means. There is, however, a further suits our momentary needs. Thera- tics of objects and events in the exter-
Physical Therapy/~olume71, Number 2 /February 1991
nal environment, and the characteris- straints and the task at hand (cognitive limb to a moving or stationary ob-
tics of the field of external forces and perceptual skills). The individual ject); o r by developing a plan to alter
inherent in the environment. Re- is able to develop and control the the environment and the individual's
sources might be viewed as con- means to the goal (ie, to control his relationship to the environment.
straints on the individual,l9 o r they or her movement and achieve a com-
might be viewed as affordances. As plementarity of the afferent and ef- Example of Skiltful Behavior
constraints, they are the factors that ferent processes that support it), not
are uniquely orchestrated in the orga- only under one set of conditions, but To gain greater insight into the phe-
nization of movement. As affordances, under any conditions in which this nomenon of skill, we can examine the
they are the relative functional offer- task arises. problem-solving behavior of the fra-
ings inherent in the individual's oper- ternal twins "Jimmy" and "Johnny," as
ational characteristics and in a particu- The individual must be selectively filmed during a developmental study
lar environment for a particular attentive and adaptive to both internal by McGraw51 in the 1930s. (The origi-
individual. and external conditions surrounding nal longitudinal films taken by Mc-
the task (and context). To achieve an Graw are permanently housed in the
Resources may be relatively stable economy of effort, the individual must Film Library, Teachers College, C e
features of the individual o r the envi- be capable of a well-timed incorpo- lumbia University, New York, NY.) As
ronment, o r they may change rather ration of nonmuscular forces in the depicted in Figures 1 and 2, the boys
slowly o r rapidly (eg, changes attribut- organization of the movement or will- were engaged in a problem-solving
able to growth, development, learn- ing to trade off biomechanical effi- task involving the manipulation of a
ing, o r sudden trauma; environmental ciency for another purpose. Lastly, the set of pedestals of various heights to
changes attributable to context; individual must be capable of incor- attain an object otherwise out of
changes in object dimensions; porating o r exploiting the operating reach. I selected this particular se-
changes in scale). Importantly, re- characteristics of his or her own body quence because it demonstrates the
sources are tools for problem solving (whether psychological, physiological, many characteristics of skillful behav-
and are recognized as such (albeit biomechanical, or neuromotor) that ior discussed in this article. More spe-
often intuitively and to varying de- impose limits on the organization of cifically, it demonstrates how skill is
grees of effectiveness) by the individ- the movement. relative to the individual in every
ual. (For further discussion, see the sense of the word: his o r her size,
works of Goldfield," Gentile28 Hig- Any degree of success in achieving a scale, point in development, cognitive
gins,43 Gihson,4' N e ~ e l l , 4and
~ Gold- goal, regardless of the level of skill, ability, fitness level, and degree of
field and Shaw.49) demands that the individual be an competence and confidence. Figures
active participant in the task. The pro- 1 and 2 demonstrate quite different
Skill as Creative Resource cesses and prerequisites underlying problem-solving strategies emerging
Usage the genesis of skillful performance over time, but each eventually result-
are the same for us all. It is the thera- ing in achieving the same goal.
The seemingly simple definition of pist's/teacher's role to understand
skill as creative resource usage is im- these prerequisites and develop inter- The first pictorial sequence in
bued with subtleties regarding the vention strategies that would help to Figure 1 depicts Johnny at 20 months
underlying prerequisites of skillful enhance the individual's available re- of age after 3 weeks of exposure to
behavior. For example, to creatively sources (see article by ArendSOfor a the task. He was trying to get an ob-
utilize resources toward goal attain- framework that the therapist might ject placed on top of the tallest of
ment and to be effective implies that apply). Importantly, an individual's eight pedestals. He moved the small-
the individual has a mastery of con- available pool of resources can be est pedestal adjacent to the largest
trol over I he processes involved in altered. It is our role as therapists and pedestal, recognized he could not
problem solving. The individual has teachers to develop techniques to reach the object, and involved an in-
acquired and can deploy functional assess an individual's resources, to termediately higher pedestal . . . but
synergies to his o r her advantage. determine which resources are perti- placed it in an inappropriate spatial
nent to particular problems, and to relationship and failed at the task. (We
Optimally, the individual understands ensure that the performer matches are not certain whether he was capa-
the goal and what is demanded of these requirements. If the individual ble of moving o r climbing on one of
him o r her, can organize a movement does not meet these requirements, the taller pedestals o r whether he
that complementsindeed e x p l o i t s we must plan to alter his o r her re- even noticed them o r viewed them as
his or her capabilities and capacities sources by developing programs to a tool. Even if he had used a taller
within a particular environmental mi- enhance strength, flexibility, o r endur- pedestal, however, it seems that he
lieu, and has an intuitive understand- ance; by developing basic skills that might have placed it an inappropriate
ing of his o r her own states and ca- might subserve the task (eg, the abil- distance from the object.)
pacities and an ability to analyze the ity to summate forces, track a moving
environment in light of these con- object, o r time the placement of a
Physical Therapy /Volume 71, Number 2 'February 1991
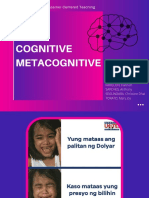
Figure 1. 'Yohnny" in his attempts to acquire a n object placed out of his reach by moving any of a series of e@t available ped-
estals graded in height. Johnny is depicted at 2 0 months of age, 26 months of age, 5 years of age, and 8 years of age. (Adaptedfrom
McGraw M. Growth: A Study of Johnny and Jimmy filmstrip]. New York, NY Babies Hospitak 1932-1940.) (Drawn by JGH Moore.)
Physical Therapy /Volume 71, Number 2 /Februaly 1991
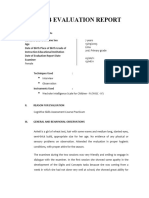
Figure 2. 'yimmy" ('Yohnny's"fraterna1 twin brother) attempting the same task described in Figure I legend at 26 months of
age; 28 months of age, 5 years of age, and 8 years of age. (Adaptedfrom McGraw M. Growth:A Study of Johnny and Jimmy Ifilm-
strip]. New York, NY: Babies Hospital; 1932-1940.) (Drawn by JGH Moore.)
Physical Therapy /Volume 71, Number 2 /February 1991
At 26 months of age, with the object push the pedestals). He arranged ment solutions as a prototype for the
now suspended from the ceiling at a them in a familiar serial order-a lesser-skilledJimmy to mimic or aspire
height of 2.44 m (8 ft), he moved all staircase-and proceeded to climb to. We can, however, ask how we can
but one of the pedestals (rather eas- them. However, he recognized some- alter Jimmy's available pool of re-
ily) to a cluster arrangement. Using thing about himself-he could not sources to enhance his success and
several, but not all, of the pedestals bring himself to climb onto the tallest skill at the task. The point is that nei-
that he positioned, he climbed to the pedestal. Given that insight, he re- ther skill, nor strategy, nor movement
top and attained the object. arranged the pedestals a number of can be imposed-they are derived and
times around the tallest one, without evolve as a function of experience by
At 5 years of age (after not having per- realizing that this alteration did not an active participant. This is an impor-
formed this task for 3 years), he swiftly remove the obstacle of climbing onto tant lesson for us as parents, teachers,
moved the pedestals with a spinning the tallest pedestal. (He still had inad- and therapists that will be dealt with
action into a cluster arrangement that equate spatial knowledge.) Finally, he again later in this article.
provided him with various alternatives; removed the tallest pedestal (a wise
however, he used only three to climb application of self-knowledge), re- I believe the most striking aspect of
on. He attained the object with mo- placed it with the next tallest pedestal, this observational analysis is how it
mentary trepidation in standing at the and tried again. This time he very shows that the strategy and the behav-
top, which he quickly overcame. carefully positioned the pedestals (tak- ior of each child, at any time, comple-
ing a great amount of time to pre- mented his strengths and weaknesses
At 8 years of age, Johnny selectively cisely place each pedestal, making and reflected his current level of un-
approached and swiftly moved only many minute adjustments), but still derstanding and skill. The task de-
two pedestals. He attained the object, could not quite bring himself to stand manded an application of resources
mounting the pedestals with ease. erect on the next tallest one. His cre- (ie, of skill). There was no single so-
ative resolution, although making the lution. The goal was consistently
The first pictorial sequence in task more suitable to himself, still achieved by Johnny (and ultimately
Figure 2 depicts Jimmy at 26 months could not quite make up for his lack Jimmy), using variable solutions (of
of age after 7 weeks of exposure to of physical ability and self-confidence. actions and movements), each a func-
the task. (Practice was begun for each Interestingly, the strategy of building a tion of the momentary conditions sur-
boy 2 weeks after he showed he staircase (although not the most effi- rounding performance and each re-
could understand the problem; cient solution in terms of the number vealing useful information about the
Johnny began practice at 19 months of pedestals involved) enabled Jimmy performer. This was not a study of
[77 weeks] of age, and Jimmy began to create a familiar situation to involve learning, but rather of how current
practice at 23 months [94 weeks] of himself in. Yet, his lack of motor con- abilities are reflected in strategy and
age.) At 26 months of age, Jimmy trol appropriately produced caution movement.
used a strategy similar to his broth- and fear and ultimately failure at the
er's: he used a number of pedestals task (but perhaps increased knowl- The sequences depicted in Figures 1
(more than Johnny), placed them in edge about the task and himself). and 2 show how Johnny and Jimmy
an inappropriate spatial relationship applied their current capacities toward
to the object, and failed at the task. At 8 years of age, Jimmy still carefully the resolution of the goal, and, para-
Cognitive limitations regarding spatial positioned the pedestals in a staircase doxically, but very much characteristic
relationships (and perhaps a scale- arrangement, using his full body to of skill, how each child was limited in
induced limitation at manipulating push them, and attained the object by the degree of goal attainment by his
and climbing a higher pedestal) ini- climbing up the stairs. He used all the current capacity for goal resolution.
tially made success at this task impos- pedestals and had not achieved the There was active participation in the
sible for either boy. selective manipulation of only the problem and a creative use of re-
essential pedestals; however, the strat- sources that were exploited in the at-
In the next sequence, at 28 months of egy he chose suited his needs. That is, tempt to achieve the goal.
age, Jimmy used a cluster arrange- perhaps all of the pedestals were es-
ment, but selected pedestals of inap- sential in his regard. Any creative use of resources implies
propriate heights in his attempt to that the individual has self-knowledge,
reach the object and eventually with- In this sense, we cannot fairly compare an understanding of the task, and an
drew from the task (perhaps indicat- Johnny's and Jimmy's respective levels idea of how the two variables might
ing limited knowledge of spatial rela- of skill because the strategy should suit interact. Indeed, access to this knowl-
tionships or of self in relation to the the individual and cannot be imposed edge is critical because it is the very
task and pedestals). He was frustrated. or unfairly expected. Although Johnny knowledge that forms the basis of the
had a higher level of skill (and a dif- problem-solving strategy. (For exam-
At 5 years of age, Jimmy had a hard ferent pool of available resources) ple, Riccio and St0ffregen5~examined
time moving the pedestals (and, thus, than Jimmy, it would not be appropri- shifts in strategy to control stance as a
appropriately used his full body to ate to use Johnny's strategy and move- function of available information and
Physical Therapy /Volume 71, Number 2 /February 1991
goal. Interestingly, they view the effi- task, and about one's own strengths have come to terms with, are quite
ciency of stance not in biomechanical and weaknesses (the kinds of knowl- knowledgeable about themselves.
terms, but rather in terms of its con- edge that accrue as a function of These individuals are clearly skillful,
sequences for other behaviors. That experience in any task). What did not relative to their pool of resources. As
is, stance is efficient if it can serve the occur at any time, however, was a participants in a recreation program
purposes of perception and action. stereotypical pattern of movement to for handicapped individuals, they
The usefulness of stance, however, is solve the task. Skillful behavior is not were not taught movements, but
dependent o n the individual's ability simply the execution of a stereotypic rather, as already-skilled individuals,
to control stability.) movement, and a particular motor they have learned to analyze tasks in
skill (eg, moving a pedestal) is not light of their capabilities and to devise
Fundamental to the genesis of skillful synonymous with a movement. Skill- problem-solving strategies that work
behavior are the individual's capacity ful behavior is the effective use of an for them, in an environment that sup-
for self-knowledge and capability for available pool of resources such that ports and guides their learning and
task analysis and environmental analy- effective movements emerge in re- celebrates their participation in the
sis. Both types of knowledge are ac- sponse to the surrounding conditions. process.
cessible to the individual o n the basis What is effective is defined by the cur-
of an interaction of proprioceptive, rent status of the performer, not by Task Analysis
exteroceptive, exproprioceptive, and some ideal form.
cognitive processes, and they are de- Regardless of skill level, when individ-
pendent o n a unique genetic and ex- Examples of Sklllful Use uals attempt a new task, they must
periential history. Proprioception re- of Resources first analyze the task in relation to
fers to the extraction of information their currently available pool of re-
regarding the position and movement To further illustrate how individual sources. Based o n this analysis, many
of the body (ie, on the state of the resources can b e skillfully applied to decisions are made. The individual
individual, o r the internal environ- a specific task, consider the following will either engage in the task as de-
ment), exteroception (commonly con- two examples of handicapped individ- fined, alter the task to better suit the
sidered perception) refers to the ex- uals who have already learned some available resources (if possible), de-
traction of information regarding the fairly complex skills. vise a plan to alter the resources and
state of the external world, and ex- attempt the task at a later time, or
proprioception refers to the extraction A young man with a congenital deficit, withdraw from the task.
of information regarding the move- leaving him with little functional move-
ment o r position of self in relation to ment in his lower extremities, is swim- Skill in task analysis is also subject to
the external world. All three are per- ming. He has learned a swimming varying degrees of effectiveness. Ide-
technique that complements his mor-
ceptual processes subserving action. ally, there should be a complementar-
phology, but the task had to be nar-
All three processes are information- rowly defined for him-he could not ity between the outcome of the task
dependent and influenced by an indi- breathe on every stroke, and he could analysis and the subsequent (or si-
vidual's unique genetic and experien- not use his lower body to contribute to multaneous) motor behavior of the
tial history. They may be considered balance and propulsion in the water. individual. Individuals who have a
as skdls in their own right and are He totally submerged his body in the lower level of skill in task analysis are
amenable to learr1ing.~6,53 Cognitive prone position during swimming, used less likely to engage in effective mo-
processes refer to the development a modified breaststroke for a number tor behavior than individuals who
and operation of the knowledge un- of strokes, rested at the pool's edge, have a higher level of skill in task
derlying decision making and under- and then continued to swim the length analysis. For example, they may inap-
lying the perceptual processes that of the pool in this fashion. propriately choose to attempt a task
support goal-directed behavior. that they are ill-prepared for, o r they
A young woman with arm structure
typical of thalidomide-induced defor- may b e unable to determine which
Typical of problem-solving behavior, mities is playing table tennis. She quite aspects of the environment o r which
both boys in Figures 1 and 2 engaged competently manipulates the paddle personal resources are pertinent to
in problem solving at various levels of and ball to her advantage. Her serving the problem. Similarly, individuals
skill (as a function of their develop- and stroking techniques are modified may b e highly skilled at task analysis,
ment and context), and their skill to her capabilities. She cannot reach but have a low degree of motor skill.
evolved to different degrees-both in shots that are at extreme positions. They may indeed have a good idea
the parsimony of their solutions and Within her range of attainable shots, about what needs to be done, but
in the assuredness of their movement. she is quite skillful. know that they cannot d o it. Hence,
There was, I am sure, a good deal of they appropriately redefine the task,
incidental learning-about pedestals In both examples, the individuals are or attempt to alter their pool of re-
and how to move them, about spatial clearly comfortable with themselves sources to make the task accessible to
relationships, about self in relation- and their capacities. Both individuals, them, or withdraw from the task.
ship to the environment and to the having congenital deficits that they
Physical ?'herapy/Volume 71, Number 2 /February 1991
I offer a problem for you to resolve
as an example of a typical task analy-
sis. The task is to climb the tree de-
picted in Figure 3. Although the fol-
lowing questions are not meant to be
all-inclusive or indicative of exactly
what-either in context or in se-
quence-an individual would ask, I
believe they embody the essence of
task analysis: What does this problem
entail or demand of you (eg, in terms
of actions, movements, cognitive
knowledge, information extraction,
strength)? What do you need to know
about the tree? About yourself? About
yourself in relation to the tree? How
will you, and how can you, gather this
information? How then, if you choose
to participate, will you climb the tree?
What will your strategy be? How will
you evaluate the effectiveness of your
strategy?Your movement? On what
basis? If the task is presented under a
different set of conditions, how might
your strategy or movement(s) change
(eg, if you were tired, injured, strong-
er, younger, or being chased)? If the
tree was smaller or a bough breaks, Flgure 3. Can you climb this tree?
would you still participate? Would you
know when to withdraw? Would you esting problem to analyze in its own her problem-solving ability. Task
be able to? right)? Perhaps you would (rightly) analysis is a skill unto itself--a self-
choose not to climb the tree. Are referentially based skill that is depen-
It should be apparent that your skill- there any problems or characteristics dent on existing personal resources.
fulness in this example is not synony- that you already know about yourself
mous with your ability to execute a that would preclude your involve- Role of Task Analysis in
series of tree-climbing movements ment? What could you, or a teacher, Problem Solving
that you have automatized. Your skill- or a therapist do to make this task
fulness is dependent on a realistic accessible to you or to deal with the The ultimate result of task analysis
appraisal of the problem and a match- limiting problems o r characteristics specifies for the individual the nature
ing of the demands of the problem to that you know of? How would you of the forces involved in solving the
your resources. Throughout your par- feel if someone told you what to do, problem and how these forces might
ticipation in this task, you must re- analyzed the problem for you, pre- be dealt with in the solution. That is,
main responsive to contingencies that supposed your capabilities, or made the individual determines such things
may arise. You must remain analytical you dependent on their judgment and as the magnitude of the force needed
in a self-referential fashion. In order analysis of the problem, rather than for this task, where and when these
for this type of participation in the facilitating your active involvement in forces are applied on the object(s) or
task to occur, the task must have the problem? on the body, how external forces are
meaning or significance to you and pertinent to the task and how and
you must have a basis for self- The initial series of questions posed when they should be incorporated, the
observation and environmental obser- in this example are typical of the role the limb segments and torso play
vation. Your strategy and movement largely intuitive task analysis that an in the allocation and absorption of
will emerge as your analysis and par- individual would engage in before these forces, and how the body and
ticipation proceed. and during problem solving. The indi- the environment can be organized to
vidual's degree of effectiveness in per- apply these forces. A problem-solving
What if you cannot be adequately re- forming the task is based on his o r strategy is born, and an orientation
sponsive o r analytical in this task? her realistic and useful analysis of the (that is, a stance o r a cooperative ar-
What if your pool of resources does task, ongoing responsiveness to con- rangement of the body and the envi-
not match the task? What if the task tingencies, and confidence in his or ronment) is assumed to initiate the
really does not interest you (an inter-
Physical Therapy /Volume 71, Number 2 /February 1991
movement. The organization of the the object and apply forces of equal The momentary marshaling of re-
movement that emerges is repre- magnitude through both hands (lest sources is as efficient as it can be for
sentative of the individual's analysis the object rotate), open the hand in the surrounding set of circumstances
and particularization of the force order to establish a larger area of (including individual mood state or
problem. contact, stabilize the shoulder-arm whim). If we, as therapists, wish to
complex and spine so that the force alter an individual's problem-solving
Translating a Force Problem Into generated by the powerful leg mus- strategy or movement, we must alter
a Strategy and Movement cles is effectively transmitted to the the resources that underly its organi-
object without dissipation, and apply zation and thus enhance the problem-
Consider the example of the task of the force steadily and slowly. The in- solving capacity of the individual.
pushing a pedestal. Making the goal dividual's particularization of the force
more specific, imagine that you are problem to the movement, however, The genesis of motor skill is depen-
asking someone to move the pedestal, is as effective as his o r her knowledge dent on a unique interplay of cogni-
as nearly as possible, in a linear fash- about how he o r she can move ob- tive and perceptual processes that
ion (versus rotating it upon its cor- jects. The effectiveness of the actual support task analysis and motor be-
ners). Looked upon as a force prob- movement that emerges is dependent havior. The quality of an individual's
lem, this task demands an application on the individual's ability to control it participation in a variety of tasks is
of force through the center of gravity along desired parameters. considered to be limited by currently
of the object in order for it to move available resources. Yet, at the same
linearly; pushing large, heavy objects A series of principles (mechanically, time, the act of participation is a re-
is most efficiently achieved by apply- morphologically, and environmentally finer of those resources. Active partici-
ing those forces simultaneously by the derived) were applied to the resolu- pation is our way of applying and ac-
involved body parts. The problem tion of the force problem and became cruing knowledge, that is, of learning.
becomes redefined in tenns of what it particularized as a strategy for move- Learning is the process of becoming
takes to get an object to move a cer- ment. We can evaluate an individual's skillful. It is the process of experien-
tain way under certain conditions and effectiveness in solving the problem tially inducing change in those re-
in terms of what it takes for a person against this standard. We must, how- sources amenable to learning and in
to move an object that way. ever, have a basis for understanding the behavior they support. It is the
individuals' deviations. For example, study of how experience is retained
Decisions will need to be made re- how might the problem-solving strat- and applied in our functional interac-
garding the nature of force to be ap- egy o r movement be affected if the tions with the world.
plied and the way it will be applied. In shoulder, arm, wrist, o r hand muscu-
principle, the magnitude of the force is lature is weak; if there is insufficient Learning
dependent on the mass and inertia of friction between the feet and the
the pedestal and the desired velocity ground; if the individual is unsure of Traditionally, learning is defined as
to be imparted to the object; the direc- himself o r herself; if the individual the process that results in a relatively
tion that the force should be applied is does not understand the goal; if an permanent change in behavior
dependent on the type of motion de- observer is present; o r if the pedestal brought about by experience. Let us
sired (ie, linear o r angular) and the is tall, short, or top heavy? examine this notion of permanence.
degree of fri~rionbetween the object What does it mean when we have
and the ground. The indvidual ana- Summary "learned something o r when we
lyzes the task to answer these ques- have experienced a relatively perma-
tions. 'The individual's answers are It can be stated that tasks pose force nent change in behavior? It implies a
only as effective as his o r her knowl- problems to be solved by an individ- change s o profound that we have
edge about how objects move. ual through some cooperative rela- truly altered our operating knowledge
tionship among body segments and base. It implies that we have access to
In order now to apply a force to get the environment. The strategy and and have benefited from the informa-
the pedestal to move linearly, the in- movement that emerge to solve the tion base and analytical processes of
dividual must decide how the body problem are reflective of the individu- the skill we have learned. We not
and the environment might be orga- al's skill in task analysis, of the cur- only can perform the skill (ie, solve
nized to effectively apply such a force. rently available pool of resources, and the problem), but we can also apply
Ideally, a force is only as effective as of the individual's skill in marshaling the knowledge and control accrued to
the stability and firmness of its base of those resources and controlling the future behavior. This application of
support. So, an individual ought to movement. The strategy and move- knowledge and control occurs auton-
establish a firm base of support be- ment that emerge are compatible with omously, on an unconscious and intu-
tween the feet and the ground, widen these skills and resources-they are a itive level. When we have learned
the stance in the direction of the in- derivative of them. something, that knowledge becomes a
tended motion, place the hands equi- tool that is available for subsequent
distant from the center of gravity of interactions, while limiting the scope
Physical Therapy /Volume 71, Number
of those interactions. Of paramount of the coordination he needs to de- learner, but rather we are providing
importance to the therapist/teacher is velop (as a flotation device might in- an opportunity for guided discovery
understanding the process that p r o deed do). In addition, there is always on the part of the learner. We allow
duces these changes. a danger that the performer becomes the learning process to occur and
overly reliant on external support. In attempt to facilitate that process.
The view that I am presenting here this example, the instructor initially Learning is viewed as an interactive
argues that, during learning, we apply supplies manual support and progres- and cyclic process of discovery and
currently available analytical skills to sively withdraws that support. mastery over the knowledge bases
acquire information relating the rele- that support functional behavior.
vant variables of the task in a self- Under this structured condition, the
referential fashion. We acquire the performer is relearning how his body Summary
ability to analyze tasks and to marshal behaves in the water and how he can
the resources necessary to success- use his body to exploit the buoyant What is being discovered? The
fully participate in those tasks. effects of water. He is learning to use learner is discovering the relevant
his available resources to balance relationships and features of the self
What Is Learned? himself in a vertical float position so and the environment in light of the
that he may ultimately manipulate his task and principles relating these vari-
During learning, the learner is pro- position in the water. This learner has ables as they apply to the emerging
gressively developing a system of confidence in his ability to reacquire cooperative relationship among body
principles to constrain the body so this skill and has trust in the ability of parts and between the body and the
that it may ultimately act as a single, the instructor to help him. To his ad- environment.55 The individual is dis-
harmonious unit, organized with ref- vantage, as a previously skilled swim- covering the nature of the force prob-
erence to a specific problem.54 A spe- mer, he has considerable knowledge lem to be solved and how to apply
cific problem-solving strategy and the about water and the act of propulsion the sources of information pertinent
associated movement emerge as a through water. His main concerns are to its resolution in structuring the
function of this acquired knowledge to reformulate this knowledge in a problem-solving strategy and
and as a function of level of develop- way that is pertinent to his current movement.
ment and skill. condition and to exert the control
necessary to apply such knowledge. By what means? The learner dis-
To get an idea of what is being covers these relationships and princi-
learned during skill acquisition, con- The learner in this example must re- ples by the application of existing re-
sider the example of a quadriplegic vise his knowledge base about his sources, that is, task-driven and self-
individual, recently paralyzed in a div- own body and how it interacts with referential proprioceptive, extero
ing accident, in the process of learn- the environment. This situation is ceptive, exproprioceptive, and cogni-
ing how to control himself in the wa- quite different from that of the previ- tive processes. The individual uses
ter. He is relearning to swim by ous examples of people with congeni- existing observational and analytical
controlling his head-neck position. He tal limitations who are fully aware of tools that support task analysis, self-
is learning to use the positioning of their resources and who, during skill analysis, and environmental analysis.
his head and neck to induce passive acquisition, need to apply their re-
movements of the shoulder-arm com- sources to the task. In this example, What is being mastered? The
plex. In a sense, the paralyzed parts of the learner first needs to rediscover learner, essentially, is mastering the
his body can be viewed as external the relevant features of his self and unconscious and intuitive procedural
objects over which he has some con- become familiar with his own limited kn0wledge5~~57 that directs the mar-
trol and that have some control over pool of resources as they relate to the shaling of resources for this task. In
his nonparalyzed body parts. This task of maintaining and manipulating this way, knowledge may be consis-
new relationship must be understood a position in water. This rediscovery tently and autonomously applied in
and then exploited. process necessitates a great deal of the execution of the movement. Addi-
exploration on the part of the learner. tionally, the individual masters the
In this example, the learner uses his This process will be enhanced by the ability to selectively control the blend
available resources, with verbal and support of his teacher/therapist, who of forces that underly the body-
manual assistance from an instructor, will establish a context that allows environment relationship appropriate
in order to define his relationship to exploration to occur. The redevelop- to the task.
the water. The addition of externally ment of his working knowledge base
provided resources (eg, a flotation will form an important substrate for The Process of Learning
device, a supporting hand) could fa- future learning (see article by Arend5O
cilitate this process, but only if the for a full development of this issue). Learning is a process demanding in-
external support would not unrealisti- sight into the task and selective atten-
cally alter the information the per- As teachers and therapists, we are not tion to the pertinent sources of infor-
former needs to obtain o r the nature imparting movement solutions to a mation within the self and within the
Physical Therapyr/Volume 71, Number 2 /February 1991
environment that will influence the posed by biomechanical, anatomical- and generalizati0n.5~~59 Learning does
behavior. Of central concern during physiological, and environmental not end with technical mastery;
the learning process in the acquisition variables pertinent to the task. The rather, learning refines existing
of motor skill is the ability on the part goal of the first phase of learning a knowledge. Learning makes accessible
of the learner to ultimately organize a motor skill is to discover the relation- goals that were not previously attain-
coherent pattern of movement that ships between these variables and the able, because the individual is truly
suits the demands of the task. This movement. changed by the knowledge accrued.
product (ie, the movement), however, As Brunefl stated, each change asso-
d l evolve and transform throughout This phase serves the purpose of clar- ciated with learning reflects what is
the learning process and will reflect lfylng for the learner what is impor- gained, and, with each gain, the task is
the current status of the learner. tant in the task and offers the learner approached anew.
a basis for developing a general strat-
The early phases of skill learning are egy to approach the task, along with a Engaging in the problem-solving pro-
characterized by a high degree of general idea of a body-environment cess represents a commitment on the
cognitiveconscious involvement on relationship that will be likely to part of the individual to (1) gain in-
the part of the learner in analyzing achieve the goal. It is only with this sight into the task, which provides the
the motor problem o r engaging in insight that the learner will have suffi- meaning needed to direct perceptual
task analysis.38.39 The learner is at- cient clarity of purpose and means to and cognitive problem-solving strate-
tempting to understand both what is establish a system for self-observation gies and to interpret outcomes;
expected and how the problem- and environmental observation (2) gain insight into the force prob-
solving strategy and movement can be needed in order to extract informa- lem to be solved, that is, the coopera-
compatible with the variables in- tion, m o w behavior, and analyze tive effort o r relationship among body
volved in the task. It is not possible to performance. When such insight oc- parts and external objects and forces
engage in any appropriate motor be- curs, meaningful development of a required to solve the problem;
havior until this insight occurs, that is, cooperative relationship can begin. (3) particularize the force problem to
until the learner understands the There is a context for the extraction the movement, that is, actually de-
meansends relationship (or, as indi- and use of information and a context velop a coordinativecompensatory
cated earlier, the nature of the force for the progressive refinement of the relationship among body parts and
problem to be solved). The learner is movement toward some personally external objects and forces; and (4)
developing a totally complementary defined biomechanical o r functional progressively refine and gain a degree
system for solving the problem. He o r optimum (perhaps itself evolving). If of control o r mastery over the knowl-
she must learn to meaningfully orga- the learner is confused, the solution is edge base that supports the sM1 and
nize all behaviors that support the confused. Achieving clarity of purpose the allocation of forces supporting the
intricately intertwined information- and insight into the means-end rela- movement that emerges under this
gathering and performatory aspects of tionship signifies that the learner is and similar (or quite unique)
the task. At the same time, the learn- ready to attempt and refine that conditions.
er's petiormance is limited by his o r relationship.
her current knowledge and currently Changes In Motor Behavior as
available: organizational capacities. At this point, the learner is through a Function of Learning
Learning will result in a relatively per- the first phase of learning and has
manent change in behavior because answered the question: What does A Tendency Toward Efficiency
this knowledge base is altered. In a this task demand of me, and how
sense, the existing and the pending might I resolve these demands in my As skill is acquired during the process
bases of knowledge merge and co- movement solution? Now, through of learning, behavior tends to develop
evolve in a nonlinear fashion. At the practice, the learner can further refine efficiency. That is, there is a tendency
same time, it is not possible for effec- the solution. Continued practice is toward the consistent application of
tive learning to occur if the learner directed at achieving a degree of tech- an underlying set of principles that
does not meet the minimum prereq- nical mastery over this and other via- are mechanically, environmentally,
uisites t o engage in the task, that is, if ble solutions until the marshaling of and psychologically-morphologically
the currently available pool of re- resources underlying the movement derived and task specific. These prin-
sources is in some way inadequate for solutions becomes autonomous, that ciples are ultimately observed as in-
successful goal attainment. is, becomes a part of the individual's variant characteristics of the move-
working knowledge base and a tool ment (despite differences in the actual
The central problem for the learner for subsequent learning. pattern of movement between o r
then is to understand the nature of within performers). The movement is,
the motor problem to be solved so Summary in essence, structured around these
that a coordinated pattern of move- principles. The movement, therefore,
ment can e m e r g e 4 n e that is maxi- This is the essence of learning-a changes as knowledge of the princi-
mally compliant with demands im- cyclic process of discovery, mastery, ples change. Similarly, the movement
Physical Therapy /Volume 71, Number
changes as the individual's ability to viewed as the gradual adaptation to teachers, to suggest ways in which the
control the kinematic chain changes. the task and to environmental con- control problem could be appropri-
straints, so that energy expenditure is ately simplified, rather than leaving
Using the example of Johnny and minimized or so that personal, per- the restriction up to the less knowl-
Jimmy, we observed changes in per- haps functional, goals are met. edgeable learner.
formance over time on a task that
demanded suitable manipulation and Progressive Transformation of The learner redefines the goal for
placement of pedestals and execution the Structure of the Movement himself or herself. Typically, in the
of a climbing strategy to attain the initial phase of learning, from an ob-
goal. In this task, efficiency could be During the learning process, and as server's point of view, movements are
evaluated in terms of the selective the knowledge and control bases de- riddled with inconsistencies, extrane-
utilization of pedestals and the pattern velop, a movement form is progres- ous movements, and pauses. Addition-
of energy expenditure in moving and sively modified in a way that is per- ally, the movement may not be coor-
climbing them. As mentioned earlier, sonally suited and adaptive. As the dinated with external objects that are
success in this task is not dependent learner is discovering relevant con- involved in the skill. That is, the
on the automatization of a particular straints to be marshaled in the skill, learner may temporarily remove the
movement. Yet, if we were to evaluate the knowledge and control (or confu- interaction with external objects as
the evolution of selected elements of sion) so far accrued are reflected in part of his o r her goal because it is
the boys' movements over time, we the problem-solving strategy and in too complicated to deal with. The
would see a tendency toward effi- the spatial and temporal structure of learner may redefine the goal as the
ciency (ie, in terms of hand place- the movement. Thus, examining shifts structure of a kinematic chain that is
ment on the pedestal, body position in the structure of the movement dur- divorced from selected environmental
in relation to the pedestal, speed of ing the learning process lends insight controls. Knowing that this is likely to
movement, placement of limbs and into the learner's current knowledge happen, the teacher/therapist can be
torso in the act of climbing). These and control capabilities. invaluable in more appropriately re-
elements would approximate a more defining (or, better yet, progressively
efficient solution over time, despite Typical of many learning experiences, building) the task so that it is accessi-
kinematic variation in the actual the learner initially restricts degrees ble to the learner, yet does not ulti-
movements used. The solutions of freedom of movement by self- mately detract from the ultimate,
would be more efficient. imposing some form of rigidity o r more complicated, coordination re-
freezing of body segments (Con- quired. Be forewarned that the result
Some tasks, however, d o require a nolly63 aptly called this restriction of of the learning process could be the
kinematically consistent movement as movement the use of self-tetany). Self- automatization of poor o r inadequate
part of the goal. In these tasks, the tetanies are seen in the movement as understandings and thus poor or in-
evolution of the structure of the small ranges of motion in participat- adequate solutions (which could be
movement during the learning pro- ing joints, the use of a limited (and due to the inadequacies of the learner
cess is the focus of the observer's at- often inappropriate) number of body or the teacher/therapist).
tention. The processes underlying the segments, and the inclusion of unnec-
transformation of movement are the essary and inappropriate pauses in The learner's moment-to-moment
same, however, regardless of the task. the continuity of the movement (what goal(s) may not be known by an ex-
Problem-solving strategies and move- would colloquially be called "jerki- ternal observer and may not resemble
ments transform in similar ways, in ness"). Seefeldt and Haubenstrickefil the ultimate goal of the task. A wise
the direction of eficiency, during the offer a developmental example of the teachedtherapist is aware that the
learning process (and during develop- same phenomenon. learner is clearly working on the es-
ment, as observed and reported by tablishment and refinement of a
Seefeldt and Haubenstrickefil and At this point, the learner seems to be movement relationship that is only as
pictorially depicted by Wickstrom62). attempting to simplify the degree of effective as his o r her currently evolv-
control needed over the body, while ing knowledge. It is unlikely that the
As efficiencydevelops, the learner is learning the appropriate supporting learner is matching the movement to
viewed as optimizing constraining relationships (ie, among agonist and an ideal form-this would be an inap-
principles and structuring the move- antagonist muscle groups, among propriate mimicry, rather than
ment around these principles. Learn- proximal and distal segments, and guided, self-referential discovery.
ing may be viewed, in this context, as among internal and external forces).
the gradual refinement of movement The shortened kinematic chain that The mimicking of solutions is a tem-
(and its supporting processes) toward emerges allows the learner to test porary strategy at best. The learner
a biomechanical or functional opti- ideas about the task in a limited fash- will have learned nothing about the
mum that is personally derived-ne ion and to slowly acquire the control problem o r about generating a solu-
that minimizes work done and maxi- over forces involved in the task. tion to the problem. Rather, the
mizes goal accomplishment. It is Knowing this, it behooves us, as learner will have learned to be a rep-
Physical Therapy/Volume 71, Number 2 /February 1991
licator of someone else's solution. tional behavior. Movement remains movement, but rather to facilitate the
This replicated solution is often not the ultimate means by which func- understandings that produce that
understood by the learner and has no tional interaction with the world oc- movement. Our goal as therapists is to
supporting knowledge base to make it curs. Skillfulness is thus limited by the facilitate the learning process in a way
useful-the learner has learned to be nature of the resources available to that is suited to the unique characteris-
dependent on someone else for an the individual that support the genesis tics of the learner and to respect the
answer. I believe this to be more of movement and that underly its con- product for all it has to tell us. Too
training than learning. Such training trol. One's degree of skill is dynamic often we view the product as deficient
is perhaps useful under certain cir- and evolving. and wrong, rather than as an evolving
cumstanc:es (ie, when an individual is reflection of the learner's current level
not capable of learning, but needs to Motor skill is the ability to use move- of understanding and control. In this
be functional). ment as a problem-solving tool. The sense, it is never wrong.
demands that are inherent within the
Depending on how the task is pre- tasks we encounter must be analyzed, If a person cannot participate in the
sented by a teacher, or analyzed by a understood, and resolved in a self- learning process, for whatever reason,
learner in the absence of a teacher, the referential fashion. Ultimately, these we may have to impart nongeneraliz-
problem is often broken down in a demands are translated into a cooper- able solutions. We must understand,
way that more o r less facilitates the ative relationship among body seg- however, that this person is being
developn~entof skill. Obviously, we ments, and between the body and the trained. With learning, there is gener-
hope to be maximally facilitatory in environment. To construct (coordi- alizability. With training, there is a
our interventions with the learner. At nate) and effect (control) this relation- memorization of solutions that are
the same time, we hope to assist the ship, the individual must understand nongeneralizable and of limited value.
learner in becoming autonomous, that the nature of forces that underly it. If we teach solutions, rather than en-
is, to help the individual learn to learn Movement is structured around the couraging discovery and active gener-
so that he or she may become inde- understanding of the force problem. ation of strategies, we short-change
pendent of us. The intervention strat- The effectiveness of the movement is the learner. In order for the learner
egy used by the teacher/therapist must limited by the skill in analyzing the to become fully functional, he or she
be carefully devised to deal with the task. Effective movement is dependent must engage in the learning process
learner's initial lack of knowledge and on generating an appropriate coordi- autonomously-independent of us.
control when encountering a problem native relationship between the body
(see the chapter by Ger1tile3~for many and the environment. Effective move- Our ultimate goal is to help the
practical suggestions in this regard). ment is dependent on the ability to learner become autonomous as a
control the spatial and temporal allo- learner, with the most effective set of
Summary and Conclusions cation of internal and external forces resources possible and with the
underlying its production. means for self-enhancing those re-
Skill is the acquired ability to solve sources. We wish the learner to be-
problems with a degree of consistency Learning is the process by which the come a competent problem solver
in goal actainment and economy of individual acquires motor skill. That whose movements are effective in
effort. It offers the individual a degree is, it is the process by which the indi- achieving his o r her goals. Our role
of competence in encounters with the vidual acquires the knowledge to co- then is to assist the learner in under-
external world. The need to be skillful, ordinate and control movement in standing, amassing, and refining the
therefore, seems a biological impera- order to consistently and autono- resources that serve as the "raw mate-
tive. By nature, we are equipped to mously achieve his o r her goals. rial" for skill expression and learning.
acquire and apply knowledge in the We wish to assist the learner in the
form of functional organizations that Implications for Therapeutic development of his o r her abilities to
are reflected in our behavior. Intervention both analyze tasks and develop effec-
tive, personally suited, cooperative
Skill is a reflection of our inherent Learning is a process. We deny that relationships between the body and
tendency to become increasingly or- process if we attempt to provide the the environment for any task he or
ganized as a result of experience in solution. We must view learning as a she may encounter. In essence, we
the direction of maximal compliance process of coming to terms with a wish to assist the learner in exerting
between the individual and the envi- task in a self-referential fashion. It is control over the factors that influence
ronment The problems that are re- the understanding of all the elements the detailing and progressive refine-
solved by the individual arise from involved in the task that enables the ment of movement-self-
interaction with the environment. product (ie, the movement) to understanding, environmental under-
Skillfulness in solving those problems emerge. standing, and self-as-agent in the
is a product of an interacting set of environment for the task at hand.
resources-f multiple intelligences- Our goal, as facilitators of learning, is
acting in concert in service of func- not to get the learner to perform a
Physical Therapy /Volume 71, Number
References Psycho-motor du Sport. Quebec, Canada: Pro- Roth K, eds. Studying Complex Movement Phe-
fessionalle de L'Activite Physique du Quebec; nomena: The Motor-Action Controversy.
1 Gentile AM. A working model of skill acqui- 1975:ll-28. Amsterdam, the Netherlands: Elsevier Science
sition with application to teaching. Quest. 24 Higgins JR. Movements to match environ- Publishers BV; 1988.
1972;17:3-23. mental demands. Research Quarterly. 43 Higgins S. Movement as an emergent form:
2 Bartlett FC. Thinking:An Experimental and 1972;43:312-336. its structural limits. Human Movement Science.
Social Study. London, England: Unwin Hyman 25 Higgins JR, Spaeth RK. Relationship be- 1985;4:119-148.
Ltd; 1958. tween consistency of movement and environ- 44 Special feature: What is motor develop-
3 Welford AT. Fundamentals of Skill. London, mental conditions. Quest. 1972;17:61-69. ment? Quest. 1989:41.
England: Methuen London Ltd; 1968. 26 Gibson JJ. The Senses Considered as Per- 45 Sparrow WA. The efficiency of skilled per-
4 Poulton EC. On prediction in skilled move- ceptual Systems. Boston, Mass: Houghton Miff- formance.Journal of Motor Behavior.
ments. Psychol Bull. 1957;54:467478. lin Co; 1966. 1983;15:237-261.
5 Connolly K, ed. Mechanisms of Motor Skill 27 Turvey MT. Preliminaries to a theory of 46 Sparrow WA, Irigarry-LopezVM. Mechani-
Development. New York, NY: Academic Press action with reference to vision. In: Shaw R, cal efficiency and metabolic cost as measures
Inc; 1970. Bransford J, eds. Perceivi~ig,Acting and Know- of learning a gross motor task.Journal of iMo-
ing. Hillsdale, NJ: Lawrence Erlbaum Associates tor Behavior. 1987;19:24&264.
6 Whiting HTA. Acquiring Ball Skill: A psycho-
Inc; 1977:211-265. 47 Gibson JJ. The theory of a5ordances. In:
logical Interpretation. Philadelphia, Pa: Lea &
Febiger; 1969. 28 Kelso JAS, Schoner G. Self-organization of Shaw R, Bransford J, eds. Perceiving, Acting
coordinative movement patterns. Human and Knowing: Tou~ardsa n Ecological Psychol-
7 Bilodeau EA, ed. Principles of Skill Acquisi- Movement Science. 1988;7:2746. ogy. Hillsdale, NJ: Lawrence Erlbaum Associ-
tion. New York, NY Academic Press Inc; 1969.
29 Kugler PN, Kelso JAS, Turvey MT. On the ates Inc; 1977:67-82.
8 Kay H. The development of motor skills 48 Newel1 K. Constraints on the development
control and co-ordination of naturally develop-
from birth to adolescence. In: Bilodeau EA, ed. ing systems. In: Kelso JAS, Clark JE, eds. The of coordination. In: Wade MG, Whiting HTA,
Principles of Skill Ayuisition. New York, NY:
Development of Movement Control and Co- eds. Motor Development in Children:Aspects
Academic Press Inc; 19693-57.
ordination. New York, NY: John Wiley & Sons of Coordination and Control. Dordrecht, the
9 Cratty BJ. Mo~lemenlBehavior and Motor Inc; 1982:7-78. Netherlands: Martinus NijhoffDr W Junk Pub-
Learning. Philadelphia, Pa: Lea & Febiger; lishers; 1986:341-360.
30 Thelen E, Kelso JAS, Fogel A. Self-
1964. organizing systems in infant motor develop- 49 Goldfield EC, Shaw R. Mordances and in-
10 Fitts PM. Perceptual-motor skills learning. ment. Dev Rev 1987;7:39-65. fant learning: a reply to Horowitz. Dev Rev.
In: Melton AW, ed. Categories of Human 31 Thelen E. Self-organization in developmen- i984;4:37a386.
Learning. New York. NY: Academic Press Inc; 50 Arend S. Developing the substrates of skill-
tal processes: can systems approaches work?
19641224-285.
In: Gunnar M, Thelen E, eds. Systems and De- ful movement. Motor Skills: Theory Into Prac-
11 Henry FM, Rogers DE. Increased response velopment: The Minnesota Symposia on Child tice. 1981;4:1-10.
latency for complicated movements and a Psycholop. Hillsdale, NJ: Lawrence Erlbaum 51 McGraw M. Growth: A Study of Johnny
"memory drum" theory of neuromotor reac- Associates Inc; 1989;22:77-117. and Jimmy. New York, NY Appleton-Century;
tion. Research Quarterly. 1960;31:448458. 32 von Hofsten C. Predictive reaching for 1935.
12 Henry FM. Specificity vs generality in moving objects by human infants.JExp Child 52 Riccio GE, Stoffregen TA. Mordances as
learning motor skill. In: Brown RC, Kenyon Psychol. 1980;30:369-382. constraints on the control of stance. Human
GS, eds. Clinical Studies on Physical Activity. 33 Goldfield EC. The ecological approach to Movement Science. 1988;7:265-300.
Englewood Cliffs, NJ: Prentice-Hall; 1968:32%
perceiving as a foundation for understanding 53 Gibson EJ. Perceptual Learning and Devel.
330. and development of knowing in infancy. Dev opment. New York, NY Appleton-Century-
13 Adams JA. Motor skills. Ann Rev Psychol Rev. 1983;3:371-404. Crofts; 1969.
1964;15:181-202.
34 Kugler PN, ed. Self-organization in biologi- 54 Kelso JAS, ed. Human Motor Behaz!ior.
14 Schmidt RA. A schema theory of discrete cal work spaces. Human Movement Science. Hillsdale, NJ: Lawrence Erlbaum Associates Inc;
motor learning. Psycho1 Rev. 1975;82:225-260. 1988;7:24. 1982.
15 Adams JA. A closed-loop theory of motor 35 Pick HL, ed. Special section-motor devel- 55 Tuller B, Fitch HL, Turvey MT. The Bern-
learning. Journal of Motor Behar!ior. opment: the control of action. Dev Psychol. stein perspective, 11: the concept of muscle
1971;3:111-150. 1989:25. linkage or coordinative structure. In: Kelso
16 Keele SW. Movement control in skilled 36 Haken H, ed. Svnergetics:A Workshop. New JAS, ed. Human Motor Behaz!ior. Hillsdale, NJ:
motor performance. Psychol Bull. 1968;70:387- York, NY Springer-Verlag New York Inc; 1977. Lawrence Erlbaum Associates Inc; 1982:253-
403. 270.
37 Shaw R, Kinsella-Shaw J. Ecological me-
17 Stelmach GE. Information Processing in chanics: a physical geometry for intentional 56 Polanyi M. The Tacit Dimension. New
Motor Control and Learning New York, NY: constraints. Human Movement Science. York, NY: Doubleday; 1966.
Academic Press Inc; 1978. 1988;7:155-200. 57 Kihlstrom JF. The cognitive unconscious.
18 Marteniuk RG. Information Processing in 38 Gentile AM. Skill acquisition: action, move- Science. 1987;237:1445-1452.
Motor Skills. New York, NY: Holt, Rinehart and ment, and neuromotor processes. In: Carr JH, 58 Whitehead AN. Aims of Education. New
Winston Inc; 1976. Shepherd RB, Gordon J, et al, eds. Movement York, NY The Free Press; 1967:2941.
19 Higgins JR. Human Movement: An Inte- Science: Foundations for Physical Therapy in
59 Ellis MJ. A paradox for teacher and scien-
grated Approach. St Louis, Mo: CV Mosby Co; Rehabilitation. Rockville, Md: Aspen Publishers
tist. Quest. 1976;26:128-137.
1977. Inc; 198793-154.
60 Bruner JS. Processes in Cognitive Growth:
20 Bernstein NA. The Co-ordination and Reg- 39 Jeka JJ, Kelso JAS. The dynamic pattern ap- Infancy. Worcester, Mass: Clark University
ulation of Movements. Oxford, England: Perga- proach to coordinated behavior. In: Wallace Press; 1968.
mon Press; 1967. SA, ed. Perspectives in the Coordination of
Moz~ement.Amsterdam, the Netherlands: Else- 61 Seefeldt V, Haubenstricker 1. Patterns,
21 Arend S, Higgins JR. A strategy for the clas-
vier Science Publishers BV; 19893-45. phases, or stages: an analytical model for the
sification, subjective analysis, and observation study of developmental movement. In: Kelso
of human movement. Journal of Human 40 Connolly K, Bruner JS. Competence: its JAS, Clark JE, eds. The Development of Move-
Movement Studies. 1976;2:36-52. nature and nurture. In: Connolly K, Bruner JS, ment Control and Co-ordination. New York,
22 Koesrler A, Smythies JR, eds. B q o n d Re- eds. The Groujth of Competence. New York, NY: John Wiley & Sons Inc; 1982:309-318.
ductionism-New Perspectives in the Life Sci- NY Academic Prcss Inc; 1974:3-7.
62 Wickstrom RW. Fundamental Motor Pat-
ences: The Alpbach Symposium. Boston, Mass: 41 Reed E. An outline of a theory of action terns. Philadelphia, Pa: Lea & Febiger; 1983.
Beacon Press; 1968. systems.Journal of Motor Behavior.
1982;14:9%134. 63 Connolly K. The nature of motor skill dc-
23 Gentile AM, Higgins JR, Miller EA, Rosen
velopment.Journal of Human Movement
BM. Structure of motor tasks. In: Mour!ement, 42 Reed E. Applying the theory of action sys-
Studies. 1977;3:128-143.
Actes du 7 Symposium en Apprentissage tems to the study of motor skills. In: Meijer 0 ,
641139 Physical Therapy /Volume 71, Number 2 /February 1991
You might also like
- Contextualism The World View of Behavior AnalysisDocument36 pagesContextualism The World View of Behavior AnalysisGuillermo Andres Aldana RojasNo ratings yet
- Comparison of Learning Theories PDFDocument15 pagesComparison of Learning Theories PDFblacknurseNo ratings yet
- Modes of LearningDocument5 pagesModes of LearningJossy Liz García PeñaNo ratings yet
- Charles Greenwood Et Al. - Ecobehavioral Analysis in The Classroom: Review and ImplicationsDocument19 pagesCharles Greenwood Et Al. - Ecobehavioral Analysis in The Classroom: Review and ImplicationsIrving Pérez MéndezNo ratings yet
- The Final Piece To A Complete Science of Behavior: Behavior Development and Behavioral CuspsDocument8 pagesThe Final Piece To A Complete Science of Behavior: Behavior Development and Behavioral CuspsWilliam Montgomery UrdayNo ratings yet
- Chat Teoria Moderna A Partir de VygotskyDocument7 pagesChat Teoria Moderna A Partir de VygotskyFrancisco AlzateNo ratings yet
- Conceptualizingcontext 1998Document11 pagesConceptualizingcontext 1998Tesis LabNo ratings yet
- Ajzen TPB Obhdp1991 PDFDocument34 pagesAjzen TPB Obhdp1991 PDFHusna Hafiza Bt. R.AzamiNo ratings yet
- KognisiDocument5 pagesKognisisgjrstujtiNo ratings yet
- HUTTO - Going RadicalDocument21 pagesHUTTO - Going Radicaljairo leonNo ratings yet
- Environmental PsychologyDocument35 pagesEnvironmental Psychologyfarmaciasalvadora86No ratings yet
- An Introduction To Principles of BehaviorDocument28 pagesAn Introduction To Principles of BehaviorFernando Nicolás StellaNo ratings yet
- Learning Styles: Implications For Distance Learning: Cite This PaperDocument14 pagesLearning Styles: Implications For Distance Learning: Cite This PaperAndy Delos ReyesNo ratings yet
- This Content Downloaded From 109.175.243.75 On Mon, 08 May 2023 14:43:27 +00:00Document12 pagesThis Content Downloaded From 109.175.243.75 On Mon, 08 May 2023 14:43:27 +00:00Anna ChuNo ratings yet
- Qualitative Research Traditions - A Review - Jacob 1987Document50 pagesQualitative Research Traditions - A Review - Jacob 1987ayesha.mariamNo ratings yet
- Multiscale Behavior Analysis and Molar Behaviorism: An Overview: Multiscale Behavior Analysis and Molar BehaviorismDocument22 pagesMultiscale Behavior Analysis and Molar Behaviorism: An Overview: Multiscale Behavior Analysis and Molar BehaviorismJose VillanuevaNo ratings yet
- From Input To Affordance: Social-Interactive Learning From An Ecological Perspective Leo Van Lier Monterey Institute Oflntemational StudiesDocument15 pagesFrom Input To Affordance: Social-Interactive Learning From An Ecological Perspective Leo Van Lier Monterey Institute Oflntemational StudiesKayra MoslemNo ratings yet
- Our Group AssignmentDocument7 pagesOur Group AssignmentMohammed Abdul-LatifNo ratings yet
- Skill Acquisition in PE A Speculative PerspectiveDocument11 pagesSkill Acquisition in PE A Speculative PerspectiveegessatimothyNo ratings yet
- V 7 N1 Intro Origins BGDocument15 pagesV 7 N1 Intro Origins BGMohammad YavarzadehNo ratings yet
- Motion EconomyDocument15 pagesMotion EconomySumit DhallNo ratings yet
- Format. Hum - Determinants of Pro-Environmental Behaviour An Expert OpinionDocument8 pagesFormat. Hum - Determinants of Pro-Environmental Behaviour An Expert OpinionImpact JournalsNo ratings yet
- Activity TheoryDocument10 pagesActivity TheoryelaNo ratings yet
- A Summary of Three Adult Learning TheoriesDocument8 pagesA Summary of Three Adult Learning TheoriesIvan Zy LimNo ratings yet
- A Neural-Functionalist Approach To Learning: Texas A&M University, U.S.ADocument22 pagesA Neural-Functionalist Approach To Learning: Texas A&M University, U.S.AAna HernandezNo ratings yet
- 2901-Article Text-11512-1-10-20130329Document8 pages2901-Article Text-11512-1-10-20130329Laura CollinsNo ratings yet
- Action Research Chapter 6Document19 pagesAction Research Chapter 6kadriyeNo ratings yet
- Social Cognitive Theory and Self-Regulated Learning: Dale H. SchunkDocument2 pagesSocial Cognitive Theory and Self-Regulated Learning: Dale H. SchunkDada Aguilar DelgacoNo ratings yet
- Gagné (1984) Learning Outcomes and Their EffectsDocument9 pagesGagné (1984) Learning Outcomes and Their EffectsIgnacioNo ratings yet
- Jurnal Koognitif Bahasa Inggris - 3Document22 pagesJurnal Koognitif Bahasa Inggris - 3HadhiNo ratings yet
- Energy Research & Social ScienceDocument8 pagesEnergy Research & Social ScienceSoporte CeffanNo ratings yet
- Action ResearchDocument9 pagesAction ResearchSyafni Eliza100% (1)
- Action Research: Action Research Is An New International, Interdisciplinary, Peer Reviewed, Quarterly PublishedDocument5 pagesAction Research: Action Research Is An New International, Interdisciplinary, Peer Reviewed, Quarterly PublishedIlanggo D' GayaNo ratings yet
- Otero 1 Cognitive ProcessesDocument32 pagesOtero 1 Cognitive ProcessesDario OchoaNo ratings yet
- Ajzen - Tpb.obhdp 1991Document34 pagesAjzen - Tpb.obhdp 1991Jose A OrdinolaNo ratings yet
- Bjme 2008Document21 pagesBjme 2008Luis Ernesto GómezNo ratings yet
- Fnhum 15 718829Document14 pagesFnhum 15 718829Rafael KiyasuNo ratings yet
- Compendio de Action ResearchDocument186 pagesCompendio de Action ResearchALISSON MAITTE NEIRA OLVERANo ratings yet
- A Framework For Understanding ARDocument32 pagesA Framework For Understanding ARsalie29296No ratings yet
- Behavioral Self-Modification in Instructional Settings: A ReviewDocument6 pagesBehavioral Self-Modification in Instructional Settings: A ReviewLiane ShamidoNo ratings yet
- Evolution of Geographical Thought 6th Sem (H) CC13T 15 04 2020Document24 pagesEvolution of Geographical Thought 6th Sem (H) CC13T 15 04 2020Pankaj PharswanNo ratings yet
- #1 Driscoll, M. (2005) - Psychology of Learning For Instruction (3rd Ed.) (Pp. 71-77) - BostonDocument4 pages#1 Driscoll, M. (2005) - Psychology of Learning For Instruction (3rd Ed.) (Pp. 71-77) - Bostonapi-334778977No ratings yet
- Qualitative Research: Cultural-Historical Activity Theory.Document13 pagesQualitative Research: Cultural-Historical Activity Theory.WellingtonNo ratings yet
- Bolo de BeterrabaDocument11 pagesBolo de BeterrabaMarta CruzNo ratings yet
- Bronfenbrenner 1977Document19 pagesBronfenbrenner 1977dtpaguio100% (1)
- Chapter 14: Evolution: January 2018Document13 pagesChapter 14: Evolution: January 2018Arshia NazirNo ratings yet
- Subtarea 2Document4 pagesSubtarea 2Armando OspinaNo ratings yet
- Do We Need The EnvironmentDocument6 pagesDo We Need The EnvironmentCesar BermudezNo ratings yet
- Hii HelloDocument19 pagesHii HelloMANOJ M BNo ratings yet
- Situated Cognition and Learning From ConDocument16 pagesSituated Cognition and Learning From ConSamuel Alzate LoaizaNo ratings yet
- Triple IDocument17 pagesTriple Ijasmine ciocoNo ratings yet
- Environment Perceptions and Conservation PreferencesDocument10 pagesEnvironment Perceptions and Conservation PreferencesVictoria PérezNo ratings yet
- (Posner Et Al) Accomodation of A Scientific Conception: Toward A Theory of Conceptual ChangeDocument17 pages(Posner Et Al) Accomodation of A Scientific Conception: Toward A Theory of Conceptual Changescience_educationNo ratings yet
- Development As A Dynamic System-Smith and ThelenDocument6 pagesDevelopment As A Dynamic System-Smith and ThelenMarielisa Arnó SolórzanoNo ratings yet
- Resumen Teoria Del AprendizajeDocument30 pagesResumen Teoria Del AprendizajeEzequiel MontenegroNo ratings yet
- ENG505 Midterm Subjective PaperDocument20 pagesENG505 Midterm Subjective PaperReddit and TwitterNo ratings yet
- Tripp D - Action Research - A Methodological IntroductionDocument21 pagesTripp D - Action Research - A Methodological IntroductionrjladinoNo ratings yet
- Transdisciplinary Impulses towards Socio-Ecological Transformation: Engaged Reflections – Reflected EngagementsFrom EverandTransdisciplinary Impulses towards Socio-Ecological Transformation: Engaged Reflections – Reflected EngagementsNo ratings yet
- Appraising the Human Developmental Sciences: Essays in Honor of Merrill-Palmer QuarterlyFrom EverandAppraising the Human Developmental Sciences: Essays in Honor of Merrill-Palmer QuarterlyNo ratings yet
- Physiology and Hygiene for Secondary SchoolsFrom EverandPhysiology and Hygiene for Secondary SchoolsNo ratings yet
- Knowledge RepresentationDocument65 pagesKnowledge RepresentationRajamaheshwar MaheshNo ratings yet
- Teaching Young Multilingual LearnersDocument62 pagesTeaching Young Multilingual LearnersJoselyn ramos cubaNo ratings yet
- The Empirical Beginnings: - Johann Heinrich PestalozziDocument46 pagesThe Empirical Beginnings: - Johann Heinrich PestalozziResurreccion MajoNo ratings yet
- AI Ethics: Paula BoddingtonDocument531 pagesAI Ethics: Paula Boddingtontony pauloNo ratings yet
- Parent Training PowerpointDocument15 pagesParent Training PowerpointSamantha WeaverNo ratings yet
- TNCT 2 Strategic Thinking and Intuitive ThinkingDocument18 pagesTNCT 2 Strategic Thinking and Intuitive ThinkingTabayan Yriel GraceNo ratings yet
- Drama and Art in Education PDFDocument9 pagesDrama and Art in Education PDFDeepak KarnwalNo ratings yet
- Brain LogicDocument74 pagesBrain LogicBalayya PattapuNo ratings yet
- 4 Ds HOPDocument8 pages4 Ds HOPTiago PaivaNo ratings yet
- مفهوم الخطأ اللغويDocument20 pagesمفهوم الخطأ اللغويebnzaen16No ratings yet
- Lesson 4-Communication ModelsDocument19 pagesLesson 4-Communication ModelsChristine Mae MontesNo ratings yet
- MTB 1 - Q4 - W4 DLLDocument7 pagesMTB 1 - Q4 - W4 DLLJelinda Frias - AstorgaNo ratings yet
- Ed 204 Cognitive and Metacognitive Aperong Farillon Sarches Segundera Torato 1Document12 pagesEd 204 Cognitive and Metacognitive Aperong Farillon Sarches Segundera Torato 1Frena CerdanioNo ratings yet
- Report Vygotsky Sociocultural TheoryDocument29 pagesReport Vygotsky Sociocultural TheoryANGELIKA ABORITANo ratings yet
- Varieties of EmpathyDocument20 pagesVarieties of Empathy龙杰No ratings yet
- Pr2 Title ProposalDocument3 pagesPr2 Title ProposalliaNo ratings yet
- Teaching and Learning PrinciplesDocument9 pagesTeaching and Learning PrinciplesJanel MendozaNo ratings yet
- Objective PresentationDocument14 pagesObjective PresentationHabtamu AdimasuNo ratings yet
- Building and Enhancing New Literacies Across The CurriculumDocument48 pagesBuilding and Enhancing New Literacies Across The CurriculumAina Yamat CalusinNo ratings yet
- Wisc IV ReportDocument4 pagesWisc IV ReportScribdTranslationsNo ratings yet
- Set D GR 6 EnglishDocument1 pageSet D GR 6 EnglishKoc EsNo ratings yet
- C4 Memory and ForgottenDocument9 pagesC4 Memory and ForgottenHanan FuadNo ratings yet
- Chapter 2 QuantiDocument14 pagesChapter 2 QuantiReVels 91No ratings yet
- PL3238 Summarised Study GuideDocument202 pagesPL3238 Summarised Study GuideRobin TanNo ratings yet
- HRM Assignment1 (19-Se-33)Document4 pagesHRM Assignment1 (19-Se-33)sidra jabeenNo ratings yet
- Educ 315 - Module 1 L5 - Tungal, Jociel v.Document3 pagesEduc 315 - Module 1 L5 - Tungal, Jociel v.Jociel TungalNo ratings yet
- 7 E'sDocument13 pages7 E'sJames DelaCruzNo ratings yet
- MODULE 5 Learning Thinking Styles and Multiple IntelligencesDocument26 pagesMODULE 5 Learning Thinking Styles and Multiple Intelligencesronalddelarosa.lopez21No ratings yet
- Assessing Intelligence in A Cultural Context: Lisa A. Suzuki, Samar Naqvi, and Jill S. HillDocument20 pagesAssessing Intelligence in A Cultural Context: Lisa A. Suzuki, Samar Naqvi, and Jill S. Hillgogicha mariNo ratings yet
- The Self WorksheetDocument7 pagesThe Self WorksheetMelanie GroblerNo ratings yet