You might also like
- Elements of Electromagnetics 7th Edition - SOLUTION MANUAL - Matthew SadikuDocument513 pagesElements of Electromagnetics 7th Edition - SOLUTION MANUAL - Matthew Sadikukarla67% (9)
- DGS S6 1920 MOCK MATH EP (M2) SolutionDocument10 pagesDGS S6 1920 MOCK MATH EP (M2) SolutionAlvin LNo ratings yet
- 圓與直線Document64 pages圓與直線丁安磊No ratings yet
- 教育統計公式Document11 pages教育統計公式Kuolung LingNo ratings yet
- 圆系Document7 pages圆系J02 黄筠轩 Ng Jun XuanNo ratings yet
- 混成與形狀Document1 page混成與形狀張祐瑜No ratings yet
- Kulinarski Tehnicar Dualno - Strucni - 11-2022Document9 pagesKulinarski Tehnicar Dualno - Strucni - 11-2022Jovica StefanovicNo ratings yet
- TD125-001 ControlDocument14 pagesTD125-001 ControlJosé Luis Morejon BastidasNo ratings yet
- Mori-Tanaka Model整理Document9 pagesMori-Tanaka Model整理施玟宇No ratings yet
- Intervalos de ConfianzaDocument1 pageIntervalos de ConfianzaPedroNo ratings yet
- 彩虹股利追蹤選擇權-max on call typeDocument47 pages彩虹股利追蹤選擇權-max on call typeapi-537902743No ratings yet
- 两圆的关系Document9 pages两圆的关系J02 黄筠轩 Ng Jun XuanNo ratings yet
- No Es WalleDocument4 pagesNo Es WalleDaniel David RamosNo ratings yet
- SDT Istimewa IcaaDocument2 pagesSDT Istimewa IcaaNaisyah Salvina hendryaniNo ratings yet
- Ray Optics Final MinDocument210 pagesRay Optics Final MinSourabh DhanetiaNo ratings yet
- Ángulos Notables1Document2 pagesÁngulos Notables1Johanna AldanaNo ratings yet
- PD2 RegulaciónDocument11 pagesPD2 RegulaciónPABLO DAVID MORI MOJALOTTNo ratings yet
- Analisis Vectorial Ejercicios ResueltosDocument7 pagesAnalisis Vectorial Ejercicios ResueltosKING WOLFNo ratings yet
- 特殊角三角函數值整理Document1 page特殊角三角函數值整理coockies60910No ratings yet
- 0 ... X ... L ... L L : Metoda Conturului PoligonalDocument9 pages0 ... X ... L ... L L : Metoda Conturului PoligonalAspect97No ratings yet
- Quiz 1.: 1 Sin 60 Sin 30 Sin 90 30 Cos30 1 Sin 30 2 1 1 3 3 1 1 - 2 4 4 2Document9 pagesQuiz 1.: 1 Sin 60 Sin 30 Sin 90 30 Cos30 1 Sin 30 2 1 1 3 3 1 1 - 2 4 4 2Kateryna TernovaNo ratings yet
- W9 - Laplace Transform (Extra)Document6 pagesW9 - Laplace Transform (Extra)HermyraJ RobertNo ratings yet
- Leccion 2 CVDocument3 pagesLeccion 2 CVdanilo proNo ratings yet
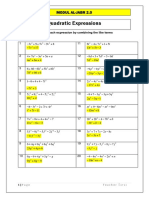
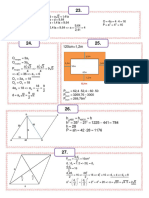
- MODUL AL-JABR 2.0-AnswerDocument11 pagesMODUL AL-JABR 2.0-AnswerFaizah AlmuhsinNo ratings yet
- Exercise 1-b - SolutionDocument6 pagesExercise 1-b - Solutionמיכאל סויסהNo ratings yet
- Revision Exercise C16&17Document3 pagesRevision Exercise C16&17kayee3101No ratings yet
- Scheme Answer GoldDocument6 pagesScheme Answer GoldKin Chen TeeNo ratings yet
- Turisticki Tehnicar - Opsteobrazovni - 11-2022Document182 pagesTuristicki Tehnicar - Opsteobrazovni - 11-2022Jovica StefanovicNo ratings yet
- Tut 2 AnsDocument30 pagesTut 2 Ans新山宽中时事校队No ratings yet
- Identidades TrigonometricasDocument1 pageIdentidades TrigonometricasIvan Yhair Juárez MendozaNo ratings yet
- 6 2TDocument16 pages6 2T臺中一中葉繼謙No ratings yet
- Paralelo 11.2Document51 pagesParalelo 11.2Bryan Cieza RojasNo ratings yet
- Exercise LaplaceDocument4 pagesExercise LaplaceiikkimleeNo ratings yet
- 世界钢号对照(合金工具钢)Document2 pages世界钢号对照(合金工具钢)aa aNo ratings yet
- 32版高中數學 (3) A互動式教學講義 (學用)Document236 pages32版高中數學 (3) A互動式教學講義 (學用)何欣恬No ratings yet
- 13 - Cónicas - Parabola y Circunferencia PR24Document23 pages13 - Cónicas - Parabola y Circunferencia PR24sophie.jimenezsNo ratings yet
- NEET UG Physics Gravitation Final-1Document86 pagesNEET UG Physics Gravitation Final-1Apeksha MudagiNo ratings yet
- Gauss SeidelDocument26 pagesGauss SeidelCalebe CostaNo ratings yet
- PW250F Rev04 - Power - ListaDocument1 pagePW250F Rev04 - Power - ListaJezus BorgesNo ratings yet
- 每日挑戰 01開Document3 pages每日挑戰 01開白刃No ratings yet
- TrigonometriDocument1 pageTrigonometriZen Nisa Cinka HatikaNo ratings yet
- Math Analysis 5Document35 pagesMath Analysis 5Mouy PhonThornNo ratings yet
- Cetvorougao ResenjaDocument2 pagesCetvorougao Resenjadraganace78No ratings yet
- Четвороугао решењаDocument2 pagesЧетвороугао решењаdraganace78No ratings yet
- Sharp Aquos lc32 40 46 52le700unDocument45 pagesSharp Aquos lc32 40 46 52le700unJuan Carlos SrafanNo ratings yet
- ASC-3H ManualDocument44 pagesASC-3H Manualhankankan25No ratings yet
- Rukovodstvo PDFDocument112 pagesRukovodstvo PDFИвайло ВасилевNo ratings yet
- Tabel TrigonometriDocument1 pageTabel Trigonometriadinda asaNo ratings yet
- Sudut Istimewa 0 - 360Document1 pageSudut Istimewa 0 - 360rahmansaifudin75% (4)
- InterroDocument1 pageInterrokhaoula douadiNo ratings yet
- Resolución Prueba Entrada Coord Polares y Números Complej PDFDocument2 pagesResolución Prueba Entrada Coord Polares y Números Complej PDFPRICILLA GIANINA TORRES GASTULONo ratings yet
- 2021答案Document4 pages2021答案ch NisteNo ratings yet
- Rbhracanacrkkm Uca Cati Sasna Rbhmhaksrt: Vitüasßanbec©Kvitüakm UcaDocument136 pagesRbhracanacrkkm Uca Cati Sasna Rbhmhaksrt: Vitüasßanbec©Kvitüakm UcaSrun TaingNo ratings yet
- Tabelul TrigonometricDocument1 pageTabelul TrigonometricLilia ChiticNo ratings yet
- Multdivpoly 2Document2 pagesMultdivpoly 2mamalay0407No ratings yet
- CHP 18Document7 pagesCHP 18nixon.ls.chanNo ratings yet
- Theory of ComputationDocument428 pagesTheory of ComputationTYCOC194 Yashvardhan SinhaNo ratings yet
- FARE Matrix Comparisons Data1Document497 pagesFARE Matrix Comparisons Data1Dragan PamučarNo ratings yet
- 習作 (二) 第4章 (教用) PDFDocument16 pages習作 (二) 第4章 (教用) PDFYen ChenNo ratings yet