You might also like
- Beee Unit 2 MeterialDocument18 pagesBeee Unit 2 MeterialnaveenNo ratings yet
- Construction and Working Principle of DC MotorsDocument3 pagesConstruction and Working Principle of DC Motorsharishkarthik.7799No ratings yet
- Muhammad Hamza 106report11Document13 pagesMuhammad Hamza 106report11Muhammad Hamza 18-NTU-0106No ratings yet
- Assignment # 6Document7 pagesAssignment # 6Jay Ey100% (1)
- Outdoor MachineDocument23 pagesOutdoor MachineMos3B Sabry 1⃣No ratings yet
- What Is A DC Motor?Document14 pagesWhat Is A DC Motor?karthick LNo ratings yet
- The Construction of A DC Generator Includes Several Key ComponentsDocument11 pagesThe Construction of A DC Generator Includes Several Key ComponentsMD. Humayun KobirNo ratings yet
- DC Motor Are of 3 Types They Are .Document12 pagesDC Motor Are of 3 Types They Are .Krishna100% (1)
- Share ElectricalDocument7 pagesShare ElectricalIsaac Stephen ApenyoNo ratings yet
- Ee-120 DC MachineDocument6 pagesEe-120 DC Machinesmk30150No ratings yet
- Module 3 DC Machines NotesDocument16 pagesModule 3 DC Machines NotesAffan KhanNo ratings yet
- What Is DC MotorDocument38 pagesWhat Is DC Motoralvin dalumpinesNo ratings yet
- Investigatory Project DC Motor and Ac GeDocument29 pagesInvestigatory Project DC Motor and Ac Gemuskansaini1306No ratings yet
- Dot 1Document5 pagesDot 1Thomas Nathaniel AngNo ratings yet
- MachinesDocument10 pagesMachinessanjeevani rawatNo ratings yet
- Unit 2Document85 pagesUnit 2Naitik NavyNo ratings yet
- Disscussion of TheoryDocument5 pagesDisscussion of Theoryjamesbergano18No ratings yet
- DC MachineDocument15 pagesDC Machineyashchotaliya.el21No ratings yet
- Salman Salu ElectricalDocument9 pagesSalman Salu ElectricalAzeem AsgharNo ratings yet
- DC GeneratorDocument14 pagesDC GeneratorGlen DangaranNo ratings yet
- 2 Dc-Motors-3Document69 pages2 Dc-Motors-3JheromeNo ratings yet
- DC MachinesDocument25 pagesDC MachinesKristoffer PascualNo ratings yet
- BASIC ELECTRICAL AND ELECTRONICS ENGINEERINGDocument80 pagesBASIC ELECTRICAL AND ELECTRONICS ENGINEERINGSIVAPRASAD KOLLATI GIEREEE100% (1)
- DC Motor: Fleming's Left Hand Rule: If We Stretch The First Finger, Second Finger and Thumb of Our LeftDocument3 pagesDC Motor: Fleming's Left Hand Rule: If We Stretch The First Finger, Second Finger and Thumb of Our LeftgshreyaNo ratings yet
- Construction of A DC GeneratorDocument6 pagesConstruction of A DC GeneratorHammad khanNo ratings yet
- DC & AC Machines and Speed ControlDocument53 pagesDC & AC Machines and Speed ControlInsane Clown Prince60% (5)
- Instructor - Engr. Khaled Mahfouz: ELE312 Power Systems & Electrical Machines LabDocument4 pagesInstructor - Engr. Khaled Mahfouz: ELE312 Power Systems & Electrical Machines LabVasu GargNo ratings yet
- Basic Construction of A DC MachineDocument20 pagesBasic Construction of A DC MachinesyammalaNo ratings yet
- EL221-Electromechanical System Lab 07: D.C. MachineDocument17 pagesEL221-Electromechanical System Lab 07: D.C. MachineMuhammad AreebNo ratings yet
- DC Motor Construction and Working PrinciplesDocument13 pagesDC Motor Construction and Working PrinciplesSayali HadapNo ratings yet
- Beee Unit IIIDocument20 pagesBeee Unit IIIDeependra SinghNo ratings yet
- Experiment No - 04 To Study DC MachineDocument4 pagesExperiment No - 04 To Study DC MachineRaviNo ratings yet
- Uint 4 BEEDocument17 pagesUint 4 BEEshivprakashNo ratings yet
- ECEL LAB#3 AngeladaDocument19 pagesECEL LAB#3 AngeladaAlehamarie AngeladaNo ratings yet
- Cut Section DC Machine GuideDocument19 pagesCut Section DC Machine Guidemanishsingla88No ratings yet
- CNC Drive ClassificationDocument20 pagesCNC Drive Classificationamit kumarNo ratings yet
- Direct Current MotorDocument5 pagesDirect Current Motorjamesbergano18No ratings yet
- Applications of DC GeneratorDocument6 pagesApplications of DC GeneratorRajNo ratings yet
- Construction of DC GeneratorDocument58 pagesConstruction of DC GeneratorRajeev ValunjkarNo ratings yet
- 19P205 Electrical MachinesDocument34 pages19P205 Electrical Machinessumanthlogn007No ratings yet
- Universal Motor Construction and Working: How a DC Motor Runs on ACDocument5 pagesUniversal Motor Construction and Working: How a DC Motor Runs on ACsayemNo ratings yet
- DC MachinesDocument66 pagesDC MachinesNaga Raju AngajalaNo ratings yet
- DC MotorDocument14 pagesDC MotorShreyash SargarNo ratings yet
- Electromechanical Energy ConversionDocument16 pagesElectromechanical Energy ConversionJayvie TumangNo ratings yet
- PEE 6 Lecture 1 2 3Document2 pagesPEE 6 Lecture 1 2 3carinovaroNo ratings yet
- Unit IDocument69 pagesUnit IThangam MaheshNo ratings yet
- Ayush Kashyav Professional PracticeDocument21 pagesAyush Kashyav Professional PracticeDEZ Automation And ControlNo ratings yet
- Definitions: DC Machines and EquipmentDocument20 pagesDefinitions: DC Machines and EquipmentChristian Angelo ButacNo ratings yet
- Principles of DC Motor OperationDocument49 pagesPrinciples of DC Motor OperationAvanish Verma100% (1)
- DC Generator: Construction and WorkingDocument7 pagesDC Generator: Construction and WorkingGlen Howell PanesNo ratings yet
- Mechatronics Ktu Module 6Document36 pagesMechatronics Ktu Module 6Adarsh s nairNo ratings yet
- DC motors and AC motors identificationDocument75 pagesDC motors and AC motors identificationdoveemmyNo ratings yet
- Hercules M. Biacoraelectrical-MachinesDocument8 pagesHercules M. Biacoraelectrical-MachinesBiacora Manalo HerculesNo ratings yet
- Electric Machines: EE-151 Electrical EngineeringDocument21 pagesElectric Machines: EE-151 Electrical EngineeringZeeshan ShakoorNo ratings yet
- DC Machine & Ac MachineDocument19 pagesDC Machine & Ac MachineSankara nathNo ratings yet
- DC MotorDocument8 pagesDC Motorven_avv3382No ratings yet
- Name: Khushi Goyal Class: Xii Project: DC Generator Roll No.Document6 pagesName: Khushi Goyal Class: Xii Project: DC Generator Roll No.Khushi GoyalNo ratings yet
- Projet Report ACDC-1Document9 pagesProjet Report ACDC-1saqib khalidNo ratings yet
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- BEEE MeasurementsDocument8 pagesBEEE MeasurementsJayaprasadGollaNo ratings yet
- BEEE Equipment Safety MeasuresDocument5 pagesBEEE Equipment Safety MeasuresJayaprasadGollaNo ratings yet
- BEEE Electricity BillDocument7 pagesBEEE Electricity BillJayaprasadGollaNo ratings yet
- FEV Unit-IVDocument23 pagesFEV Unit-IVJayaprasadGollaNo ratings yet
- BEEE Electricity BillDocument7 pagesBEEE Electricity BillJayaprasadGollaNo ratings yet
- Cerberus PRO Product Catalog: Fire Safety Products and AccessoriesDocument253 pagesCerberus PRO Product Catalog: Fire Safety Products and AccessoriesleonardoleitealertaNo ratings yet
- 2 - FNCPDocument5 pages2 - FNCPIlda Lekka RequizaNo ratings yet
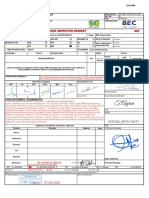
- STC Bec Wir Plu D 0209 01 PDFDocument10 pagesSTC Bec Wir Plu D 0209 01 PDFAdel MorsyNo ratings yet
- UNSG Report On Safety Security Humanitarian PersonnelDocument25 pagesUNSG Report On Safety Security Humanitarian PersonnelInterAction100% (1)
- NEOM-NDS-SPC-015 - 01.00 - Neutral Earthing Resistor (NER) SpecificationDocument15 pagesNEOM-NDS-SPC-015 - 01.00 - Neutral Earthing Resistor (NER) Specificationcawoc96196No ratings yet
- Hector: Genuine AccessoriesDocument18 pagesHector: Genuine AccessoriesssgfdfgNo ratings yet
- Menu Baru Kopi GandapoeraDocument7 pagesMenu Baru Kopi GandapoeraAlwan AhpNo ratings yet
- University of Health Sciences Lahore: Affiliated Private Sector Medical/Dental Colleges' Application FormDocument5 pagesUniversity of Health Sciences Lahore: Affiliated Private Sector Medical/Dental Colleges' Application FormkhnNo ratings yet
- DatasheetDocument112 pagesDatasheetStuxnetNo ratings yet
- Commercial Law Review Midterm - Without AnswersDocument1 pageCommercial Law Review Midterm - Without AnswersTorni JoNo ratings yet
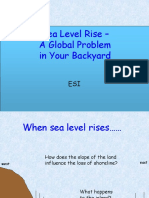
- Sea Level Rise Threatens Coastal CommunitiesDocument13 pagesSea Level Rise Threatens Coastal CommunitiesGunawan La OdeNo ratings yet
- Rocket Motor Head-end Structural AnalysisDocument83 pagesRocket Motor Head-end Structural AnalysisRudra Sai SandeepNo ratings yet
- Jane EyreDocument165 pagesJane EyreSana AbdulsalamNo ratings yet
- SP-200 Advanced PumpDocument4 pagesSP-200 Advanced PumpOsvaldo BravoNo ratings yet
- S# Isin CFI Code (As Per New ISO) Security Name Security Symbol Sector Name Security Type StatusDocument25 pagesS# Isin CFI Code (As Per New ISO) Security Name Security Symbol Sector Name Security Type StatusahmedalishNo ratings yet
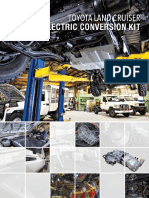
- Miller Toyota-Conversion-Kit Letter ENG WEBDocument4 pagesMiller Toyota-Conversion-Kit Letter ENG WEBskyduckNo ratings yet
- Quiz Integumentary SystemDocument23 pagesQuiz Integumentary SystemLemuel CunananNo ratings yet
- Land Tenure SystemsDocument140 pagesLand Tenure SystemsjoeclintNo ratings yet
- Cereal Based Functional BeveragesDocument7 pagesCereal Based Functional BeveragesCorina ParicanazaNo ratings yet
- Synovial Joints StructureDocument20 pagesSynovial Joints StructureJayricDepalobosNo ratings yet
- CHAPTER 3: Toxic Effects of Drugs: Pharmacology Page 1Document1 pageCHAPTER 3: Toxic Effects of Drugs: Pharmacology Page 1Gabriel GonzagaNo ratings yet
- Guided Noteboo Kin GED10 2 (Mathe Matics in The Modern World)Document5 pagesGuided Noteboo Kin GED10 2 (Mathe Matics in The Modern World)Chenie BatacNo ratings yet
- PricelistDocument184 pagesPricelistWissam JarmakNo ratings yet
- Population Ecology: Aecc-I +3 1 YearDocument32 pagesPopulation Ecology: Aecc-I +3 1 YearAnita kumari SahuNo ratings yet
- Cambridge BiologyDocument78 pagesCambridge BiologyBraweet SapkotaNo ratings yet
- Chap 24 Econ 40Document4 pagesChap 24 Econ 40Racel DelacruzNo ratings yet
- Periodic Test in Tle - Grade Ix Electricity.Document2 pagesPeriodic Test in Tle - Grade Ix Electricity.Resneth MondejarNo ratings yet
- Presentation on Chancroid: Bacterial STI Causes Painful Genital UlcersDocument12 pagesPresentation on Chancroid: Bacterial STI Causes Painful Genital UlcersBikash Sah0% (1)
- Automated Hematology Cell Counters 12-09-2023Document161 pagesAutomated Hematology Cell Counters 12-09-2023Tom JohnathanNo ratings yet
- Deliver VALUE and RENEWABLE FUTUREDocument30 pagesDeliver VALUE and RENEWABLE FUTUREAlexandru SuciuNo ratings yet