You might also like
- Easy(er) Electrical Principles for General Class Ham License (2019-2023)From EverandEasy(er) Electrical Principles for General Class Ham License (2019-2023)No ratings yet
- ExamenDocument8 pagesExamenJosué Him ZuraNo ratings yet
- Transfer Function of D.c.machine Using Generalised Machine TheoryDocument18 pagesTransfer Function of D.c.machine Using Generalised Machine Theorychethan64% (11)
- Bab 2 Inductors Capacitors and Alternating Current CircuitsDocument42 pagesBab 2 Inductors Capacitors and Alternating Current CircuitsVimal SaravananNo ratings yet
- Modern Electrical Installation for Craft StudentsFrom EverandModern Electrical Installation for Craft StudentsRating: 4.5 out of 5 stars4.5/5 (4)
- TestDocument361 pagesTestJake Sy100% (1)
- To Investigate Relation Between The Ratio of Input and Output Voltage and Number of Turns of A Self Designed TransformerDocument15 pagesTo Investigate Relation Between The Ratio of Input and Output Voltage and Number of Turns of A Self Designed Transformersuhayb96% (46)
- Electromagnetic Induction and Alternating Current by AlienDocument13 pagesElectromagnetic Induction and Alternating Current by AlienSanatan KumarNo ratings yet
- EeDocument2 pagesEesethi nagendrasundarNo ratings yet
- Alternating Current Notes Jee Iit 60Document11 pagesAlternating Current Notes Jee Iit 60Sameer KhanNo ratings yet
- Alternating CurrentDocument5 pagesAlternating CurrentNOOB GAMERNo ratings yet
- Unit 1 - Electric and Magnetic CircuitDocument71 pagesUnit 1 - Electric and Magnetic CircuitYash ChavanNo ratings yet
- Transformer 1. 1Document84 pagesTransformer 1. 1Angelica NoquiaoNo ratings yet
- قوي وآلات كهربائيه 3 ت نموذج اجابة 12-2013Document7 pagesقوي وآلات كهربائيه 3 ت نموذج اجابة 12-2013kuchowNo ratings yet
- Ganelo, Jethro B. Bautista, Joanna Marie Z. Gaulit, Carlo J. Bsme 3B May 27, 2021Document16 pagesGanelo, Jethro B. Bautista, Joanna Marie Z. Gaulit, Carlo J. Bsme 3B May 27, 2021jethro ganeloNo ratings yet
- AC Circuits Lecture 2Document14 pagesAC Circuits Lecture 2Ako si GianNo ratings yet
- Electric CurrentDocument12 pagesElectric Currentjelvatro56No ratings yet
- Resistance (R), Inductance (L), and Capacitance (C) CircuitsDocument10 pagesResistance (R), Inductance (L), and Capacitance (C) Circuitszed cozNo ratings yet
- Working Principle of A D.C Motor or How A D.C Motor RotatesDocument3 pagesWorking Principle of A D.C Motor or How A D.C Motor RotatesXahid HasanNo ratings yet
- EMI and ACDocument14 pagesEMI and ACbharathNo ratings yet
- Miki 1980Document8 pagesMiki 1980kentNo ratings yet
- Alternators: Working PrincipleDocument7 pagesAlternators: Working PrincipleQasimNo ratings yet
- EEE Module - 2Document48 pagesEEE Module - 2G46Anand P KNo ratings yet
- 01 Electrical Parameter Periodic WaveDocument15 pages01 Electrical Parameter Periodic WaveYash MotianiNo ratings yet
- DC MachinesDocument102 pagesDC MachinesmohamedashrafkotpNo ratings yet
- Synchronous MachinesDocument53 pagesSynchronous MachinesPhilip IsholaNo ratings yet
- E6 PPTDocument34 pagesE6 PPTHemanth HemanthNo ratings yet
- Physics Formula and Notes For Class 12 CBSE Board Chapter 7 ALTERNATING CURRENTDocument11 pagesPhysics Formula and Notes For Class 12 CBSE Board Chapter 7 ALTERNATING CURRENTkaruna25% (4)
- Physics MarathonDocument130 pagesPhysics MarathonSantosh TiwariNo ratings yet
- TransformerDocument54 pagesTransformerdubuli123No ratings yet
- ManualDocument11 pagesManualLoveNo ratings yet
- Ch5 SinglePhaseTrans TutorialDocument16 pagesCh5 SinglePhaseTrans TutorialBrian LiNo ratings yet
- EXPERIMENT NO 3 (AutoRecovered)Document4 pagesEXPERIMENT NO 3 (AutoRecovered)Kabish ShresthaNo ratings yet
- EPE491 - Power in AC CircuitsDocument12 pagesEPE491 - Power in AC CircuitsNabill HpNo ratings yet
- Unit7 DC MotorsDocument44 pagesUnit7 DC Motorskrishnareddy_chintalaNo ratings yet
- BEEE NotesDocument8 pagesBEEE NotesSrinathReddyNo ratings yet
- Alternating Current AC Theory 3Document40 pagesAlternating Current AC Theory 3Tharusha ImalkaNo ratings yet
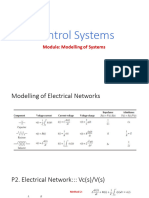
- Control Systems: Module: Modelling of SystemsDocument32 pagesControl Systems: Module: Modelling of Systemsee210002004No ratings yet
- New Text DocumentDocument10 pagesNew Text DocumentTanuja MagarNo ratings yet
- Emi Notes (Cbse Class 12 2021-22)Document5 pagesEmi Notes (Cbse Class 12 2021-22)Shaku JoshiNo ratings yet
- BEEE Unit 2-Single Phase Ac Circuits NotesDocument42 pagesBEEE Unit 2-Single Phase Ac Circuits NotesShreyash SargarNo ratings yet
- DC MachinesDocument46 pagesDC MachinesAung NetflixNo ratings yet
- Physics Formula and Notes For Class 12 CBSE Board Chapter 7 ALTERNATING CURRENTDocument11 pagesPhysics Formula and Notes For Class 12 CBSE Board Chapter 7 ALTERNATING CURRENTrahulNo ratings yet
- Slide Courtesy: Dr. Gleb V. TcheslavskiDocument55 pagesSlide Courtesy: Dr. Gleb V. Tcheslavskimera nam chinNo ratings yet
- Unit7-DC MotorsDocument40 pagesUnit7-DC MotorsNAVNEET GUPTANo ratings yet
- 10 InductanceDocument16 pages10 InductanceAde Nur HidayatNo ratings yet
- 23 - EmiDocument16 pages23 - EmiPratima MondalNo ratings yet
- Power in DC Circuits: Power, Series/Parallel Resistive Circuit, Dissipates, DC Fundamentals Circuit Board, MultimeterDocument3 pagesPower in DC Circuits: Power, Series/Parallel Resistive Circuit, Dissipates, DC Fundamentals Circuit Board, Multimeterjeremias marticioNo ratings yet
- The Transformer: I N I NDocument10 pagesThe Transformer: I N I Nعلاء ابراهيمNo ratings yet
- Chapter L: Introduction To Electrical CircuitsDocument27 pagesChapter L: Introduction To Electrical CircuitsM. Umair WaheedNo ratings yet
- Lec 1 PDFDocument19 pagesLec 1 PDFJoshua Roberto GrutaNo ratings yet
- TTLDocument31 pagesTTLLembar Firdillah KurniawanNo ratings yet
- 3.0 Transformers: 3.1 The Ideal TransformerDocument16 pages3.0 Transformers: 3.1 The Ideal Transformerhafiz_jaaffarNo ratings yet
- DC MachinesDocument24 pagesDC Machineskeshab pandeyNo ratings yet
- TransformerDocument73 pagesTransformerMd. Hafizur RahmanNo ratings yet
- EM InductionDocument21 pagesEM InductionSatheshNo ratings yet
- Lesson 8 332aDocument25 pagesLesson 8 332aLei TolentinoNo ratings yet