You might also like
- Block Ice Machine Bk50tDocument6 pagesBlock Ice Machine Bk50tWisermenNo ratings yet
- 5S ManualDocument60 pages5S ManualMun Hein ZawNo ratings yet
- PC200-8 SM - 013 Troubleshooting by Failure Code Part-3Document50 pagesPC200-8 SM - 013 Troubleshooting by Failure Code Part-3t5442071100% (2)
- Captiva 2013 Systema Electric 3.0Document13 pagesCaptiva 2013 Systema Electric 3.0carlos martinez50% (2)
- For Construction and Industry: Liebherr Diesel EnginesDocument8 pagesFor Construction and Industry: Liebherr Diesel EnginesGoran MatovicNo ratings yet
- Embedded Mechatronic Systems, Volume 1: Analysis of Failures, Predictive ReliabilityFrom EverandEmbedded Mechatronic Systems, Volume 1: Analysis of Failures, Predictive ReliabilityNo ratings yet
- 22-02-13 Samsung Answer To Staton Techniya Complaint & CounterclaimsDocument72 pages22-02-13 Samsung Answer To Staton Techniya Complaint & CounterclaimsFlorian MuellerNo ratings yet
- Simpack Off-Line and Real Time SimulationDocument23 pagesSimpack Off-Line and Real Time SimulationAnderson ZambrzyckiNo ratings yet
- Point-to-Point Trajectory Generation Under Joint Constraints For Industrial RobotsDocument9 pagesPoint-to-Point Trajectory Generation Under Joint Constraints For Industrial RobotsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Telstra Strategic Issues and CEO Leadership Briefing PaperDocument16 pagesTelstra Strategic Issues and CEO Leadership Briefing PaperIsabel Woods100% (1)
- Mechanical Vibration System With Dynamic Displacement of Long Suspension BridgeDocument9 pagesMechanical Vibration System With Dynamic Displacement of Long Suspension BridgeIJRASETPublicationsNo ratings yet
- Numerical Verification of The Drive by Monitoring Method For Identifying Vehicle and Bridge Mechanical ParametersDocument37 pagesNumerical Verification of The Drive by Monitoring Method For Identifying Vehicle and Bridge Mechanical ParametersWAN IKRAMNo ratings yet
- PapercDocument12 pagesPapercABHISHEK CHAUHANNo ratings yet
- Structures: Hossein Mahmoudi, Maryam Bitaraf, Mojtaba Salkhordeh, Siavash SoroushianDocument18 pagesStructures: Hossein Mahmoudi, Maryam Bitaraf, Mojtaba Salkhordeh, Siavash SoroushianLt HasanNo ratings yet
- Bar Tilson 2015Document12 pagesBar Tilson 2015Anonymous sQGjGjo7oNo ratings yet
- Sensors 23 06558 v2Document17 pagesSensors 23 06558 v2devagyaiitkNo ratings yet
- Machine Learning Based Frequency ModellingDocument16 pagesMachine Learning Based Frequency Modellingyq zhangNo ratings yet
- Additive Manufacturing: Maxwell Munford, Umar Hossain, Shaaz Ghouse, Jonathan R.T. Jeffers TDocument10 pagesAdditive Manufacturing: Maxwell Munford, Umar Hossain, Shaaz Ghouse, Jonathan R.T. Jeffers TRaimon Mir Al BesNo ratings yet
- 2019 KSJ IJAMT v101 pp243-259Document17 pages2019 KSJ IJAMT v101 pp243-259Viktor SokolovNo ratings yet
- Rychlik2019 Article ModellingOfTheDiagnosticStatioDocument12 pagesRychlik2019 Article ModellingOfTheDiagnosticStatioLtat KøükøüNo ratings yet
- Applmech 04 00020Document15 pagesApplmech 04 00020jose manuel gomez jimenezNo ratings yet
- An Experimental Test Bench For Cable-Driven TransmissionDocument17 pagesAn Experimental Test Bench For Cable-Driven TransmissiontorresgiovanniNo ratings yet
- Re 1Document21 pagesRe 1Shirin OthmanNo ratings yet
- Evolutionary Design of Mechanical Linkages: Amanda Ghassaei Ghassaei@mit - Edu Joy Ming Jming@college - Harvard.eduDocument12 pagesEvolutionary Design of Mechanical Linkages: Amanda Ghassaei Ghassaei@mit - Edu Joy Ming Jming@college - Harvard.eduAndy ReynoldsNo ratings yet
- Bolt 1Document10 pagesBolt 1Shawn WaltzNo ratings yet
- A Fully Analytical Nonlinear Dynamic Model of Spindle-holder-Tool System Considering Contact Characteristics of Joint InterfacesDocument30 pagesA Fully Analytical Nonlinear Dynamic Model of Spindle-holder-Tool System Considering Contact Characteristics of Joint InterfacesThaiHuynhNgocNo ratings yet
- Design of Compliant Mechanisms Applications To MEMSDocument10 pagesDesign of Compliant Mechanisms Applications To MEMSalfonsoNo ratings yet
- Disturbance ObserverDocument10 pagesDisturbance Observergustavoarins1612No ratings yet
- Identification of Crack in A Rotor System Based On Wavelet Finite Element MethodDocument14 pagesIdentification of Crack in A Rotor System Based On Wavelet Finite Element MethodJoel Morales PerezNo ratings yet
- All The BestDocument3 pagesAll The BestitzgayaNo ratings yet
- Fin Irjmets1687693710Document7 pagesFin Irjmets1687693710kalyanipanga0499No ratings yet
- A Novel Intelligent Inspection Robot With Deep Stereo Vision For Three-Dimensional Concrete Damage Detection and QuantificationDocument15 pagesA Novel Intelligent Inspection Robot With Deep Stereo Vision For Three-Dimensional Concrete Damage Detection and QuantificationLuis AlfaroNo ratings yet
- Balaji and Brake - 2019 - The Surrogate System Hypothesis For Joint MechanicDocument23 pagesBalaji and Brake - 2019 - The Surrogate System Hypothesis For Joint MechanicNidish NarayanaaNo ratings yet
- BMURALIKRISHNAANNPAPERDocument13 pagesBMURALIKRISHNAANNPAPERb.jagadeeshcvr.ac.in JagadeeshNo ratings yet
- Seismic Damage Detection in A Building Frame Via Finite Element Model UpdatingDocument14 pagesSeismic Damage Detection in A Building Frame Via Finite Element Model Updating3tarebitarafNo ratings yet
- Motion Magnificationfor Optical Based SHMDocument8 pagesMotion Magnificationfor Optical Based SHMMuneer AhmedNo ratings yet
- Sy Ie Robotics CimDocument10 pagesSy Ie Robotics CimChow Jun XunNo ratings yet
- Model-Based Sensorless Robot Collisiondetection Under Model Uncertaintieswith A Fast Dynamics IdentificationDocument15 pagesModel-Based Sensorless Robot Collisiondetection Under Model Uncertaintieswith A Fast Dynamics IdentificationPiyumal SamarathungaNo ratings yet
- A Review On The Vibration Analysis For A Damage OccurrenceDocument20 pagesA Review On The Vibration Analysis For A Damage OccurrenceSomNo ratings yet
- Buildings 13 02480 v2Document18 pagesBuildings 13 02480 v2ThaiHuynhNgocNo ratings yet
- Applied Sciences: Review of Vibration-Based Structural Health Monitoring Using Deep LearningDocument24 pagesApplied Sciences: Review of Vibration-Based Structural Health Monitoring Using Deep LearningGuilherme VazNo ratings yet
- Machine Parts Recognition and Defect Detection in Automated Assembly Systems Using Computer Vision TechniquesDocument10 pagesMachine Parts Recognition and Defect Detection in Automated Assembly Systems Using Computer Vision TechniquesPlacement UCEVNo ratings yet
- Accurate Calibration of Kinematic Parameters For TDocument10 pagesAccurate Calibration of Kinematic Parameters For TmezianeNo ratings yet
- Condition monitoring of rotating machinery through vibration analysisDocument5 pagesCondition monitoring of rotating machinery through vibration analysisEl Mehdi MakaveliNo ratings yet
- Manuscript StiffnessmodelDocument26 pagesManuscript Stiffnessmodelopenaloza9150No ratings yet
- Pipe Inspection RobotDocument7 pagesPipe Inspection RobotSharanabasappa SajjanNo ratings yet
- Accurate Characterization of Crack in Beam-Like STDocument10 pagesAccurate Characterization of Crack in Beam-Like ST1032202176No ratings yet
- Electrical Inspection and Autometed Robot For Electrical Transmission Line InspectionDocument5 pagesElectrical Inspection and Autometed Robot For Electrical Transmission Line InspectionIJRASETPublicationsNo ratings yet
- Adaptive Neural Network Force Tracking Control of Flexible Joint Robot With An Uncertain EnvironmentDocument9 pagesAdaptive Neural Network Force Tracking Control of Flexible Joint Robot With An Uncertain EnvironmentJosé Bráulio VilaçaNo ratings yet
- Hybrid Mechanism1Document13 pagesHybrid Mechanism1maruvadatarunNo ratings yet
- 期刊论文全文_9_CSOVMDDocument18 pages期刊论文全文_9_CSOVMDljt.jacky.leeNo ratings yet
- Application of The Subspace-BaDocument35 pagesApplication of The Subspace-BaOscar LizarazoNo ratings yet
- Robotic Arc Welding Sensors and ProgrammingDocument17 pagesRobotic Arc Welding Sensors and ProgrammingHasnain TariqNo ratings yet
- Med16 2Document7 pagesMed16 2Haile SimachewNo ratings yet
- Research Article: An Experimental Test Bed For Developing High-Rate Structural Health Monitoring MethodsDocument11 pagesResearch Article: An Experimental Test Bed For Developing High-Rate Structural Health Monitoring MethodsSandeep SonyNo ratings yet
- Linear Static Analysis Program For Plane Framed Structure Subjected by Fabrication ErrorDocument3 pagesLinear Static Analysis Program For Plane Framed Structure Subjected by Fabrication ErrorClairole Marie QuilantangNo ratings yet
- Structural Analysis To Improve The Performance of A Retractable Jointed-Crane - Failure Due To OverloadingDocument12 pagesStructural Analysis To Improve The Performance of A Retractable Jointed-Crane - Failure Due To OverloadingGogyNo ratings yet
- Structural Analysis To Improve The Performance of A Retractable Jointed-Crane: Failure Due To OverloadingDocument12 pagesStructural Analysis To Improve The Performance of A Retractable Jointed-Crane: Failure Due To OverloadingGogyNo ratings yet
- Structural Health Monitoring of Exterior Beam-Column Subassemblies (Feb 2022)Document17 pagesStructural Health Monitoring of Exterior Beam-Column Subassemblies (Feb 2022)Hamid GoodarziNo ratings yet
- 3D Printed Mechanical Test Frame and Analysis of Lattice Structures - Experiment Design and Research MethodsDocument9 pages3D Printed Mechanical Test Frame and Analysis of Lattice Structures - Experiment Design and Research Methodsnhut25072001No ratings yet
- A Vibration Analysis of A 6 Axis Industrial Robot Using Fea: SciencedirectDocument8 pagesA Vibration Analysis of A 6 Axis Industrial Robot Using Fea: Sciencedirectalagar krishna kumarNo ratings yet
- Discrete Models For The Simulation of Rubber CompoDocument20 pagesDiscrete Models For The Simulation of Rubber CompoAmina DinariNo ratings yet
- Fault Detection and Isolation in Robotic Manipulator Via Hybrid Neural NetworksDocument12 pagesFault Detection and Isolation in Robotic Manipulator Via Hybrid Neural Networksnick4nameNo ratings yet
- Yang 2019 J. Phys. Conf. Ser. 1311 012048Document8 pagesYang 2019 J. Phys. Conf. Ser. 1311 012048qq1175988837No ratings yet
- Topology Optimization and AI-based Design of Power Electronic and Electrical Devices: Principles and MethodsFrom EverandTopology Optimization and AI-based Design of Power Electronic and Electrical Devices: Principles and MethodsNo ratings yet
- Development of Online Hybrid Testing: Theory and Applications to Structural EngineeringFrom EverandDevelopment of Online Hybrid Testing: Theory and Applications to Structural EngineeringRating: 5 out of 5 stars5/5 (1)
- Chapter 5Document31 pagesChapter 5Marvin VinasNo ratings yet
- Vidya Mandir Public School Class 11 Computer Science String Assignment SolutionsDocument5 pagesVidya Mandir Public School Class 11 Computer Science String Assignment SolutionsArun SharmaNo ratings yet
- Characterization in Compound Semiconductor ProcessingDocument27 pagesCharacterization in Compound Semiconductor ProcessingMomentum PressNo ratings yet
- Speed Control Methods of 3-Phase Induction MotorsDocument3 pagesSpeed Control Methods of 3-Phase Induction MotorsBenzene diazonium saltNo ratings yet
- Jhamuna Tower Design DataDocument15 pagesJhamuna Tower Design DataArindam RoyNo ratings yet
- CSR of DABUR Company..Document7 pagesCSR of DABUR Company..Rupesh kumar mishraNo ratings yet
- Find Out Real Root of Equation 3x-Cosx-1 0 by Newton's Raphson Method. 2. Solve Upto Four Decimal Places by Newton Raphson. 3Document3 pagesFind Out Real Root of Equation 3x-Cosx-1 0 by Newton's Raphson Method. 2. Solve Upto Four Decimal Places by Newton Raphson. 3Gopal AggarwalNo ratings yet
- RK271007 AN RXSF 1Document2 pagesRK271007 AN RXSF 1Ahmed FaragNo ratings yet
- PackMan ReportDocument41 pagesPackMan ReportPrakash SamshiNo ratings yet
- Regular expressions chapter 3 key conceptsDocument3 pagesRegular expressions chapter 3 key conceptsNabeel Ahmed0% (1)
- PD083 05Document1 pagePD083 05Christian Linares AbreuNo ratings yet
- Prelims Module On Forensic 1Document17 pagesPrelims Module On Forensic 1Vanessa CorpuzNo ratings yet
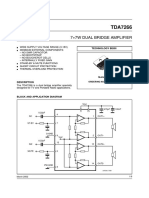
- Tda7266 PDFDocument9 pagesTda7266 PDFRenato HernandezNo ratings yet
- MSC Dissertation Gantt ChartDocument6 pagesMSC Dissertation Gantt ChartProfessionalPaperWritingServiceUK100% (1)
- BOYSEN® Marmorino™ Italian Marble Finish: Liters UseDocument1 pageBOYSEN® Marmorino™ Italian Marble Finish: Liters UseJohn Ray Esmama CalasicasNo ratings yet
- Economics Not An Evolutionary ScienceDocument17 pagesEconomics Not An Evolutionary SciencemariorossiNo ratings yet
- Partlist Sym Vf3i 185Document83 pagesPartlist Sym Vf3i 185Jack Wilder100% (1)
- UID Module Wise TopicsDocument3 pagesUID Module Wise TopicsPavan KumarNo ratings yet
- Java Pattern Programming AssignmentsDocument9 pagesJava Pattern Programming Assignmentstamj tamjNo ratings yet
- Brain Size Evolution: How Fish Pay For Being Smart: Dispatch R63Document3 pagesBrain Size Evolution: How Fish Pay For Being Smart: Dispatch R63Nika AbashidzeNo ratings yet
- Guide To Equilibrium DialysisDocument29 pagesGuide To Equilibrium DialysisHaripriya SantoshNo ratings yet
- Management Science PDFDocument131 pagesManagement Science PDFAngela Lei SanJuan BucadNo ratings yet