You might also like
- Name: Duncan Rioba Oteki Course Title: Pavement Engineering-06848 Course Code: CE 518 Task: Assignment (Chapter 2)Document10 pagesName: Duncan Rioba Oteki Course Title: Pavement Engineering-06848 Course Code: CE 518 Task: Assignment (Chapter 2)Duncan100% (1)
- Practice Final Exam Questions399Document17 pagesPractice Final Exam Questions399MrDorakonNo ratings yet
- FRCA Syllabus PDFDocument4 pagesFRCA Syllabus PDFSuhas KapseNo ratings yet
- Applications of Terrestrial Laser Scanning For Tunnels - A Review PDFDocument13 pagesApplications of Terrestrial Laser Scanning For Tunnels - A Review PDFMuhammad AmryNo ratings yet
- 10 CFD Simulation of Hydrocyclone in Absense of An Air Core 2012Document10 pages10 CFD Simulation of Hydrocyclone in Absense of An Air Core 2012Jair GtzNo ratings yet
- Math 9 Quarter 4Document12 pagesMath 9 Quarter 4Maria Sadaran100% (1)
- Localized Instructional Materials: in Mathematics Grade 5Document145 pagesLocalized Instructional Materials: in Mathematics Grade 5Melchor Lariba Elorde100% (1)
- Pub 1854Document10 pagesPub 1854pcfrancoNo ratings yet
- Abdel Khalek Et Al 2012 Model To Estimate Pavement Structural Number at Network Level With Rolling Wheel DeflectometerDocument8 pagesAbdel Khalek Et Al 2012 Model To Estimate Pavement Structural Number at Network Level With Rolling Wheel Deflectometersaksham dixitNo ratings yet
- Infrastructures 05 00007 v2 PDFDocument10 pagesInfrastructures 05 00007 v2 PDFUduebor MichealNo ratings yet
- CE 517 Project - RiobaDocument12 pagesCE 517 Project - RiobaDuncanNo ratings yet
- Crook Model 2012 - SN EffDocument11 pagesCrook Model 2012 - SN Effsaksham dixitNo ratings yet
- Performance Evaluation of Traffic Speed Deflectometer Based On Virtual Standard Test RoadDocument10 pagesPerformance Evaluation of Traffic Speed Deflectometer Based On Virtual Standard Test RoadpcfrancoNo ratings yet
- Remote Sensing: Carrier Phase-Based Precise Heading and Pitch Estimation Using A Low-Cost GNSS ReceiverDocument21 pagesRemote Sensing: Carrier Phase-Based Precise Heading and Pitch Estimation Using A Low-Cost GNSS Receiverاحمد نديم اسماعيلNo ratings yet
- Simon Stegmaier, Ulrich Rist and Thomas Ertl - Opening The Can of Worms: An Exploration Tool For Vortical FlowsDocument8 pagesSimon Stegmaier, Ulrich Rist and Thomas Ertl - Opening The Can of Worms: An Exploration Tool For Vortical FlowsJuaxmawNo ratings yet
- 52 GLTMandDUE (DTA2008)Document17 pages52 GLTMandDUE (DTA2008)guido gentileNo ratings yet
- Application of DSM in Obstacle Clearance SurveyingDocument8 pagesApplication of DSM in Obstacle Clearance SurveyingrogerNo ratings yet
- 52 GLTMandDUE (DTA2008)Document22 pages52 GLTMandDUE (DTA2008)guido gentileNo ratings yet
- 214 FullDocument16 pages214 FullBalu BhsNo ratings yet
- Chen 2017Document24 pagesChen 2017wn1529.20000No ratings yet
- Sequential Doppler Shift Based Optimal LocalizatioDocument12 pagesSequential Doppler Shift Based Optimal LocalizatioJamil AhmadNo ratings yet
- Using Traffic Information For Time-Dependent Vehicle RoutingDocument13 pagesUsing Traffic Information For Time-Dependent Vehicle RoutingByron GuamanNo ratings yet
- Fuzzy Clustering For Improved PositioningDocument12 pagesFuzzy Clustering For Improved PositioningijiteNo ratings yet
- Chapter-1: REMOTE Sensing Techniques Provide End Users With Evergrowing Volumes of DataDocument40 pagesChapter-1: REMOTE Sensing Techniques Provide End Users With Evergrowing Volumes of Dataprince395No ratings yet
- Scoping Assessment of Building Vibration Induced by Railway TrafficDocument15 pagesScoping Assessment of Building Vibration Induced by Railway TrafficSudhir KumarNo ratings yet
- Analysis of The Effects of Dynamic Mesh Update Method On Simulating Indoor Air Flow Induced by Moving ObjectsDocument13 pagesAnalysis of The Effects of Dynamic Mesh Update Method On Simulating Indoor Air Flow Induced by Moving ObjectsAnh NgoNo ratings yet
- STRUCTURAL ANALYSIS IN EARTHQUAKE ENGINEERING - A BREAKTHROUGH OF SIMPLIFIED NON-LINEAR METHODS FajfarDocument20 pagesSTRUCTURAL ANALYSIS IN EARTHQUAKE ENGINEERING - A BREAKTHROUGH OF SIMPLIFIED NON-LINEAR METHODS FajfarBeenah Sheila Khushiram50% (2)
- Using Desktop GIS For The Investigation of Accessibility by Publictransport, An Isochrone ApproachDocument21 pagesUsing Desktop GIS For The Investigation of Accessibility by Publictransport, An Isochrone ApproachpartyindacityNo ratings yet
- A1 DeformationmonitoringbygpsatembankmentDocument18 pagesA1 DeformationmonitoringbygpsatembankmentFrancis ZhuwaoNo ratings yet
- Multicast Capacity For VANETs With Directional Antenna and Delay Constraint Under Random Walk Mobility ModelDocument13 pagesMulticast Capacity For VANETs With Directional Antenna and Delay Constraint Under Random Walk Mobility ModelTanveer AhmadNo ratings yet
- The Evaluation of Redundancy For Road Traffic NetworksDocument13 pagesThe Evaluation of Redundancy For Road Traffic NetworksJOSEPH RUBEN FRANCISCO HUANAY PEREZNo ratings yet
- Terrestrial Laser Scanning PHD ThesisDocument4 pagesTerrestrial Laser Scanning PHD Thesistammibuschnorman100% (2)
- General Newell Model and Related Second Order ExpressionsDocument9 pagesGeneral Newell Model and Related Second Order ExpressionsramadhaniNo ratings yet
- Idt 15 Idt200106Document15 pagesIdt 15 Idt200106ImaneNo ratings yet
- Turner1988 PDFDocument12 pagesTurner1988 PDFGerTranNo ratings yet
- Sedifoam: A General-Purpose, Open-Source Cfd-Dem Solver For Particle-Laden Ow With Emphasis On Sediment TransportDocument39 pagesSedifoam: A General-Purpose, Open-Source Cfd-Dem Solver For Particle-Laden Ow With Emphasis On Sediment TransportDeraNo ratings yet
- Existence of Urban-Scale Macroscopic FundamentalDocument12 pagesExistence of Urban-Scale Macroscopic Fundamentalhuangtao2001No ratings yet
- Proposing New Path-Planning Metrics For Operating Rovers On MarsDocument11 pagesProposing New Path-Planning Metrics For Operating Rovers On MarsMAriaNo ratings yet
- New Spatial Clustering-Based Models For Optimal Urban Facility Location Considering Geographical ObstaclesDocument12 pagesNew Spatial Clustering-Based Models For Optimal Urban Facility Location Considering Geographical ObstaclesVerdianto PradanaNo ratings yet
- RR Sample 2Document7 pagesRR Sample 2Siyeon YeungNo ratings yet
- Computers & Geosciences: Mohammad Ali Goudarzi, Marc Cocard, Rock SanterreDocument12 pagesComputers & Geosciences: Mohammad Ali Goudarzi, Marc Cocard, Rock SanterreHakim FahmiNo ratings yet
- Rapid Calculation of Unsteady Aircraft LoadsDocument12 pagesRapid Calculation of Unsteady Aircraft LoadsROBERTO GIL ANNES DA SILVANo ratings yet
- Analytical-Empirical Pavement Evaluation Using The FWD PDFDocument9 pagesAnalytical-Empirical Pavement Evaluation Using The FWD PDFGang Liu100% (1)
- ITRS PZ90 and WGS84 PDFDocument7 pagesITRS PZ90 and WGS84 PDFGilangRizkyRamadhanNo ratings yet
- Naz Zal 2007Document10 pagesNaz Zal 2007shmruti100% (1)
- Transportation and Traffic TheoryDocument21 pagesTransportation and Traffic TheorysaobracajniNo ratings yet
- Lagrangian CoordinatesDocument19 pagesLagrangian Coordinatesjiexing ZhangNo ratings yet
- Pattern Detection in Airborne Lidar Data Using Laplacian of Gaussian FilterDocument6 pagesPattern Detection in Airborne Lidar Data Using Laplacian of Gaussian FilterAlex VrankenNo ratings yet
- A Survey On Map-Matching AlgorithmsDocument12 pagesA Survey On Map-Matching AlgorithmsMehdiHamidiRadNo ratings yet
- A Comparison of State-Of-The-Art Image EvaluationDocument14 pagesA Comparison of State-Of-The-Art Image EvaluationSantiago Cano ZapataNo ratings yet
- Xia Shao 2005 Air Pollution Hong KongDocument14 pagesXia Shao 2005 Air Pollution Hong Kongnyj martinNo ratings yet
- Paper 7-Quadrant Based WSN Routing Technique by Shifting of OriginDocument4 pagesPaper 7-Quadrant Based WSN Routing Technique by Shifting of OriginEditor IJACSANo ratings yet
- Static and Dynamic Backcalculation Analyses of An Inverted Pavement StructureDocument9 pagesStatic and Dynamic Backcalculation Analyses of An Inverted Pavement StructureWissem TaktakNo ratings yet
- Structural Number Prediction For Flexible Pavements Using The Long Term Pavement Performance DataDocument16 pagesStructural Number Prediction For Flexible Pavements Using The Long Term Pavement Performance DataVarun YadavNo ratings yet
- Estimation of Origin-Destination Matrices Based On Markov ChainsDocument10 pagesEstimation of Origin-Destination Matrices Based On Markov ChainsElíGomaraGilNo ratings yet
- HIC04 153 Sedim Bhatt SolDocument8 pagesHIC04 153 Sedim Bhatt SoldequanzhouNo ratings yet
- Optimizing The Vehicle Routing Problem With Time Windows: A Discrete Particle Swarm Optimization ApproachDocument14 pagesOptimizing The Vehicle Routing Problem With Time Windows: A Discrete Particle Swarm Optimization ApproachKasuri AbilashiniNo ratings yet
- Matecconf Tran-Set2019 08003Document5 pagesMatecconf Tran-Set2019 08003saksham dixitNo ratings yet
- Topology-Based Methods in Visualization2Document13 pagesTopology-Based Methods in Visualization2Liliana ForzaniNo ratings yet
- 1 s2.0 S1877042814000597 MainDocument10 pages1 s2.0 S1877042814000597 Mainathirap200119ceNo ratings yet
- Optimal Path Finding Method Study Based On Stochastic Travel TimeDocument6 pagesOptimal Path Finding Method Study Based On Stochastic Travel Timemike kennyNo ratings yet
- Jiang, R., Hu, M. Bin, Zhang, H. M., Gao, Z. Y., Jia, B., & Wu, Q. S. (2015)Document17 pagesJiang, R., Hu, M. Bin, Zhang, H. M., Gao, Z. Y., Jia, B., & Wu, Q. S. (2015)ap741987753No ratings yet
- Ijgi 08 00044 v2Document18 pagesIjgi 08 00044 v2AudityaNo ratings yet
- Visual Analytics Tools For Analysis of Movement Data: Gennady Andrienko1 Natalia Andrienko1 Stefan Wrobel1,2 1Document18 pagesVisual Analytics Tools For Analysis of Movement Data: Gennady Andrienko1 Natalia Andrienko1 Stefan Wrobel1,2 1rahuldeosinNo ratings yet
- Theoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlFrom EverandTheoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlNo ratings yet
- Exam 1 2 ME 429 S23Document1 pageExam 1 2 ME 429 S23DuncanNo ratings yet
- Aggregates: Aggregate ProcessingDocument29 pagesAggregates: Aggregate ProcessingDuncanNo ratings yet
- Design & Construction Factors - EnvironmentDocument30 pagesDesign & Construction Factors - EnvironmentDuncanNo ratings yet
- Paper 1Document11 pagesPaper 1DuncanNo ratings yet
- Design & Construction Factors / Considerations: TrafficDocument28 pagesDesign & Construction Factors / Considerations: TrafficDuncanNo ratings yet
- Course Overview: Ce 418/518 Pavement EngineeringDocument22 pagesCourse Overview: Ce 418/518 Pavement EngineeringDuncanNo ratings yet
- Assignment 1 1386142Document2 pagesAssignment 1 1386142DuncanNo ratings yet
- Assignment 3 1386142Document3 pagesAssignment 3 1386142DuncanNo ratings yet
- Assignment 5 1386142Document3 pagesAssignment 5 1386142DuncanNo ratings yet
- Assignment 6 1386142Document4 pagesAssignment 6 1386142DuncanNo ratings yet
- Huang Bottom AshDocument343 pagesHuang Bottom AshDuncanNo ratings yet
- Hma Mix DesignDocument281 pagesHma Mix DesignDuncanNo ratings yet
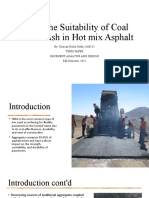
- Title:-The Suitability of Coal Bottom Ash in Hot Mix AsphaltDocument20 pagesTitle:-The Suitability of Coal Bottom Ash in Hot Mix AsphaltDuncanNo ratings yet
- Rosenthal CoverLetter2 BlackRock Feb2021Document1 pageRosenthal CoverLetter2 BlackRock Feb2021Mitchell RosenthalNo ratings yet
- Projectile MotionDocument55 pagesProjectile MotionNani Dale ZumbaNo ratings yet
- Health Project Management Through PERTDocument21 pagesHealth Project Management Through PERTAarshabh ShuklaNo ratings yet
- Area and Perimeter For SSC ExamsDocument62 pagesArea and Perimeter For SSC ExamsHema Latha100% (1)
- CambiadoDocument90 pagesCambiadonarendraNo ratings yet
- Calculate The Enthalpy and Entropy of Saturated Isobutene Vapor at 360 K From The Following InformationDocument14 pagesCalculate The Enthalpy and Entropy of Saturated Isobutene Vapor at 360 K From The Following InformationAllen Jerry Aries33% (3)
- Work-Family Con Ict Scale (ISSP) : March 2016Document18 pagesWork-Family Con Ict Scale (ISSP) : March 2016Rima TrianiNo ratings yet
- Mechanical Damage and Fatigue Assessment of Dented Pipelines Using FeaDocument10 pagesMechanical Damage and Fatigue Assessment of Dented Pipelines Using FeaVitor lopesNo ratings yet
- Lottery: Rules of The Lottery GameDocument5 pagesLottery: Rules of The Lottery GameDaisuki AishiteruNo ratings yet
- Astronomy OlympiadeDocument7 pagesAstronomy OlympiadeMDPCOS SCHOOLNo ratings yet
- Nonlinear Analysis of Concrete Wall Buildings Using OpenseesDocument64 pagesNonlinear Analysis of Concrete Wall Buildings Using OpenseesAngga Fajar SetiawanNo ratings yet
- From J D L: Part - ADocument12 pagesFrom J D L: Part - ASAUMYANo ratings yet
- REVIEW MATERIAL Basic Calculus Midterm 2023 2024 2Document12 pagesREVIEW MATERIAL Basic Calculus Midterm 2023 2024 2regineNo ratings yet
- Fanuc Operator Guide2Document45 pagesFanuc Operator Guide2Guillermo RamirezNo ratings yet
- Bessel Functions of The First KindDocument5 pagesBessel Functions of The First KindRajNo ratings yet
- Lecture-35 Torque From Salient Pole Synchronous Motor 10oct17 PDFDocument16 pagesLecture-35 Torque From Salient Pole Synchronous Motor 10oct17 PDFPulkit MehtaNo ratings yet
- Question Bank - Section of SolidsDocument5 pagesQuestion Bank - Section of SolidstomsatNo ratings yet
- Notas TAXBRA1Document40 pagesNotas TAXBRA1Sebastião ReisNo ratings yet
- RoacheDocument39 pagesRoacheUmair IsmailNo ratings yet
- GKU B Tech Civil SyllabusDocument60 pagesGKU B Tech Civil SyllabustajudeenNo ratings yet
- TanayDocument28 pagesTanayubutuvaioNo ratings yet
- Tuning Proportional Integral Derivative Controllers For Integrator/Deadtime ProcessesDocument4 pagesTuning Proportional Integral Derivative Controllers For Integrator/Deadtime ProcessesRicardo CampanaNo ratings yet
- Math - Syllabus H.R.I PDFDocument3 pagesMath - Syllabus H.R.I PDFkoushekNo ratings yet
- For More Important Questions Visit:: Matrices and DeterminantsDocument16 pagesFor More Important Questions Visit:: Matrices and DeterminantsRishabhNo ratings yet
- ZizekDocument311 pagesZizekweberian04No ratings yet