You might also like
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Rotating Machines and Transformers Unit 2 DC GENERATOR CLASS NOTESDocument70 pagesRotating Machines and Transformers Unit 2 DC GENERATOR CLASS NOTESSEDHURAJA SNo ratings yet
- Module 3-1Document53 pagesModule 3-1anishdeshmukh108No ratings yet
- Construction of DC GeneratorDocument58 pagesConstruction of DC GeneratorRajeev ValunjkarNo ratings yet
- Basic Electrical Engineering: DC Generator PrinciplesDocument14 pagesBasic Electrical Engineering: DC Generator PrinciplesDhanush 413No ratings yet
- Basic Principles of Machine OperationDocument94 pagesBasic Principles of Machine OperationRashmi SharmaNo ratings yet
- Working Principle of DC MachineDocument5 pagesWorking Principle of DC MachineimtisangyuNo ratings yet
- DC GeneratorDocument11 pagesDC GeneratorTaha khan100% (1)
- Notes For CIA-IIDocument15 pagesNotes For CIA-IIhariNo ratings yet
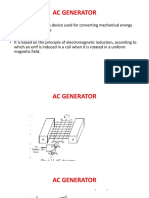
- AC Generator: How it WorksDocument37 pagesAC Generator: How it WorksS. Dinesh KumarNo ratings yet
- DC GeneratorDocument4 pagesDC GeneratorAnmol MishraNo ratings yet
- DC & AC Machines and Speed ControlDocument53 pagesDC & AC Machines and Speed ControlInsane Clown Prince60% (5)
- Electrical Machine 5 Compiled by Course Lecturer EngrDocument66 pagesElectrical Machine 5 Compiled by Course Lecturer EngrJames JohnNo ratings yet
- DC Machines: Faraday's Laws and ConstructionDocument34 pagesDC Machines: Faraday's Laws and ConstructionSaravanan T YNo ratings yet
- Peee Notes Unit IIIDocument49 pagesPeee Notes Unit IIIPujita JNo ratings yet
- Electrical Assignment 15-12-2018Document15 pagesElectrical Assignment 15-12-2018Mudasir SahoNo ratings yet
- DC Generator: How It WorksDocument3 pagesDC Generator: How It WorksDurga SampathNo ratings yet
- Unit I Generator and Motor - 11Document32 pagesUnit I Generator and Motor - 11Bharani100% (1)
- DC Generator and Motor PDFDocument20 pagesDC Generator and Motor PDFmilan subediNo ratings yet
- DC MachineDocument53 pagesDC MachineBikash ParhNo ratings yet
- Module 5 - Basic Electrical - KtuQbankDocument23 pagesModule 5 - Basic Electrical - KtuQbankThahir TNo ratings yet
- Unit IIIDocument9 pagesUnit IIIhariNo ratings yet
- Beee Unit 2 MeterialDocument18 pagesBeee Unit 2 MeterialnaveenNo ratings yet
- DC GeneratorDocument35 pagesDC GeneratorMohammed Jalaluddin RayeenNo ratings yet
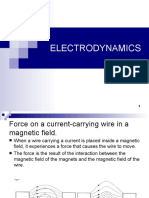
- Electrodynamics G12teachDocument27 pagesElectrodynamics G12teachMary Grace Jerna Artazo Nozal-CuadraNo ratings yet
- Synchronous Generator or AC Generator or AlternatorDocument6 pagesSynchronous Generator or AC Generator or AlternatorMd. Latifur RahmanNo ratings yet
- Construction and Working Principle of DC GeneratorsDocument3 pagesConstruction and Working Principle of DC Generatorsharishkarthik.7799No ratings yet
- Chapter 2 - Starting - SytemDocument73 pagesChapter 2 - Starting - SytemEyasu demsewNo ratings yet
- Unit IDocument126 pagesUnit Isravangupta246No ratings yet
- Barja, Act 1 - Electrical Machines 1Document3 pagesBarja, Act 1 - Electrical Machines 1Jovenal Barja Jr.No ratings yet
- DC Machines NotesDocument31 pagesDC Machines NotesCharan NayakNo ratings yet
- Unit 2 - BeeieDocument47 pagesUnit 2 - BeeieKarthick Sivakumar ChellamuthuNo ratings yet
- Basic Construction and Working of A DC GeneratorDocument15 pagesBasic Construction and Working of A DC GeneratorAnonymous QcCCBsNo ratings yet
- Ac HoDocument22 pagesAc HoFrank MujuniNo ratings yet
- DC Generators-I PDFDocument29 pagesDC Generators-I PDFPraneetha InumarthiNo ratings yet
- DC GeneratorDocument38 pagesDC Generatoraswardi8756No ratings yet
- BEEE Unit3 Part 1 - DC Motors NotesDocument20 pagesBEEE Unit3 Part 1 - DC Motors NotesShreyash SargarNo ratings yet
- Eme Practical PDFDocument68 pagesEme Practical PDFr kNo ratings yet
- Basic Construction and Working of A DC GeneratorDocument12 pagesBasic Construction and Working of A DC GeneratorMaheedhar ReddyNo ratings yet
- DC Machine & Ac MachineDocument19 pagesDC Machine & Ac MachineSankara nathNo ratings yet
- DcmachineDocument54 pagesDcmachineRoyal Ritesh SharmaNo ratings yet
- Lecture 11Document63 pagesLecture 11Ahmar KhanNo ratings yet
- Ei6402 - Electrical Machines: Unit I D.C. MachinesDocument30 pagesEi6402 - Electrical Machines: Unit I D.C. MachinesDhanush BhaiNo ratings yet
- BEE UNIT-4 PPTDocument49 pagesBEE UNIT-4 PPTAarush PitlaNo ratings yet
- Pablo Borbon Main II, Alangilan Batangas CityDocument9 pagesPablo Borbon Main II, Alangilan Batangas CityJoseph JeremyNo ratings yet
- Unit 2Document85 pagesUnit 2Naitik NavyNo ratings yet
- Ac & DC Generators NotesDocument9 pagesAc & DC Generators NotesShadyNo ratings yet
- AC GeneratorDocument7 pagesAC Generatoraswardi8756No ratings yet
- Electrical Machines IDocument54 pagesElectrical Machines I2002095No ratings yet
- Faraday's Law of Electromagnetic Induction Magnetic Field: DC GeneratorDocument7 pagesFaraday's Law of Electromagnetic Induction Magnetic Field: DC GeneratorMuhammad Syafiq Bin MazlanNo ratings yet
- Applications of Electromagnetic InductionDocument6 pagesApplications of Electromagnetic InductionAdeniji OlusegunNo ratings yet
- BASIC ELECTRICAL AND ELECTRONICS ENGINEERINGDocument80 pagesBASIC ELECTRICAL AND ELECTRONICS ENGINEERINGSIVAPRASAD KOLLATI GIEREEE100% (1)
- DC MACHINES GUIDEDocument54 pagesDC MACHINES GUIDEPrashant ChinamalliNo ratings yet
- DC Motor Are of 3 Types They Are .Document12 pagesDC Motor Are of 3 Types They Are .Krishna100% (1)
- Faradays Law of Electromagnetic InductionDocument6 pagesFaradays Law of Electromagnetic Inductionbas123No ratings yet
- Ee 21Document4 pagesEe 21Vanvan BitonNo ratings yet
- Module5 231030 112440Document54 pagesModule5 231030 112440PrathamNo ratings yet
- DC Machines (Part1)Document22 pagesDC Machines (Part1)Narayana NagapuriNo ratings yet
- Faraday's Laws of Electromagnetic InductionDocument31 pagesFaraday's Laws of Electromagnetic InductionAbhishek MohiteNo ratings yet
- An Introduction To Electronics, KnjigaDocument305 pagesAn Introduction To Electronics, Knjigazelko kovacevicNo ratings yet
- Electrical Machines-I IIIDocument55 pagesElectrical Machines-I IIIadityassripadaNo ratings yet
- Chương 2Document4 pagesChương 2Bắc LêNo ratings yet
- C37 1-1987 PDFDocument52 pagesC37 1-1987 PDFAlejandro Noe NavarroNo ratings yet
- Chapter 3:basic Principle of Electro DepositionDocument32 pagesChapter 3:basic Principle of Electro DepositionbirhangebrieNo ratings yet
- Prachamon Doped CaTiO3 CaCu3Ti4O12Document10 pagesPrachamon Doped CaTiO3 CaCu3Ti4O12diep2No ratings yet
- A Review On Power Quality Issues and Their Mitigation Techniques in Microgrid SystemDocument5 pagesA Review On Power Quality Issues and Their Mitigation Techniques in Microgrid SystemEditor IJTSRDNo ratings yet
- Lesson Plan STEM - ACDC Electronics - Electrical Power - 1Document7 pagesLesson Plan STEM - ACDC Electronics - Electrical Power - 1Jose C. Lita JrNo ratings yet
- XP6-R Six Relay ModuleDocument2 pagesXP6-R Six Relay ModuleDon HornbyNo ratings yet
- A Review of Graphene-Based Electrochemical MicrosupercapacitorsDocument22 pagesA Review of Graphene-Based Electrochemical MicrosupercapacitorsPratik SarkarNo ratings yet
- RF Manual 15 Edition: Application and Design Manual For High Performance RF Products May 2011Document120 pagesRF Manual 15 Edition: Application and Design Manual For High Performance RF Products May 2011jsdoodnath100% (1)
- Exp 1 - Mawdsely MachineDocument7 pagesExp 1 - Mawdsely MachineVishal SinghNo ratings yet
- 1.kkrao Green Energy JMR Jan - 2020Document4 pages1.kkrao Green Energy JMR Jan - 2020Prasad NarvaneniNo ratings yet
- Elements of An Optical Fiber Transmission LinkDocument2 pagesElements of An Optical Fiber Transmission LinkranjithNo ratings yet
- Simufact Forming 15.0 Whats New enDocument117 pagesSimufact Forming 15.0 Whats New enTiago ChalinskiNo ratings yet
- FRQ Modern PhysicsDocument22 pagesFRQ Modern PhysicsIvycrazeNo ratings yet
- Em MCQ SDocument5 pagesEm MCQ SmNo ratings yet
- Compact Microstrip Pitch Antenna For Mobile Application: Watheq A.neamhaDocument27 pagesCompact Microstrip Pitch Antenna For Mobile Application: Watheq A.neamhahaiderNo ratings yet
- Electrical and Chemical Diagnostics of Transformer InsulationDocument39 pagesElectrical and Chemical Diagnostics of Transformer InsulationboopelectraNo ratings yet
- IEC 62478: A Concise Guide to Acoustic and Electromagnetic Partial Discharge MeasurementsDocument34 pagesIEC 62478: A Concise Guide to Acoustic and Electromagnetic Partial Discharge MeasurementsDeepan0507No ratings yet
- PCC PANEL PART LIST AND COSTINGDocument7 pagesPCC PANEL PART LIST AND COSTINGmangal guptaNo ratings yet
- Thermal Isolation of Encapsulated MEMS Resonators: Journal of Microelectromechanical Systems March 2008Document11 pagesThermal Isolation of Encapsulated MEMS Resonators: Journal of Microelectromechanical Systems March 2008AhmedNo ratings yet
- Anam Ambil Back Up Volume Gak Ada BahanDocument55 pagesAnam Ambil Back Up Volume Gak Ada BahanMozart CilikNo ratings yet
- Eaam052209en PDFDocument249 pagesEaam052209en PDFMaicon ZagonelNo ratings yet
- Effect of Milling Time & PCA on Cu2O-ZnO/C Electrodes for CO2 ConversionDocument63 pagesEffect of Milling Time & PCA on Cu2O-ZnO/C Electrodes for CO2 ConversionLeni LismayantiNo ratings yet
- O & P Setting CalculationDocument94 pagesO & P Setting CalculationNeelakandan Masilamani67% (3)
- Power Pulse Valves PDFDocument12 pagesPower Pulse Valves PDFUrip S. SetyadjiNo ratings yet
- ELL-332 Electric Drives Lecture 4: DC Machines Part 1Document32 pagesELL-332 Electric Drives Lecture 4: DC Machines Part 1Nikhil KumarNo ratings yet
- Basic Instrumentation & Basic Pid ControlDocument20 pagesBasic Instrumentation & Basic Pid ControlakankshaNo ratings yet
- Basic Types of LightingDocument4 pagesBasic Types of LightingDen AloyaNo ratings yet