You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- IC-Applications U4Document21 pagesIC-Applications U4kavithavenkatesanNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Lic Eec-501 Notes Unit5 Iftm UniversityDocument14 pagesLic Eec-501 Notes Unit5 Iftm UniversitySougata GhoshNo ratings yet
- IC555 TimerDocument8 pagesIC555 TimerRaflysyah PutraNo ratings yet
- Bistable MultivibratorDocument28 pagesBistable MultivibratorMansi JaisinghNo ratings yet
- 555 Timer Guide: Features, Pinouts & ApplicationsDocument3 pages555 Timer Guide: Features, Pinouts & ApplicationschandrakanthNo ratings yet
- Multivibrador Com Ci 555Document11 pagesMultivibrador Com Ci 555joselito1juniorNo ratings yet
- Lab#10: Design and Study of IC 555 Multivibrator Circuits (2 Turns)Document11 pagesLab#10: Design and Study of IC 555 Multivibrator Circuits (2 Turns)Ayushman ChoudharyNo ratings yet
- Multivibrator CircuitsDocument11 pagesMultivibrator CircuitsSatyaki ChowdhuryNo ratings yet
- Report IC 555 TimerDocument17 pagesReport IC 555 TimerSantosh YadavNo ratings yet
- Timer 555 - ManualDocument20 pagesTimer 555 - ManualXen XeonNo ratings yet
- UNIT-4 Special Ics The 555 Timer IcDocument10 pagesUNIT-4 Special Ics The 555 Timer IcVerloves LoveNo ratings yet
- 3.1555 TIMER:: Schematic SymbolDocument10 pages3.1555 TIMER:: Schematic SymbolnagpradasNo ratings yet
- Module 3Document25 pagesModule 3secondaryaccaccNo ratings yet
- Opamp Applicationpart30Document31 pagesOpamp Applicationpart30KUNTALA DASNo ratings yet
- 555 Timer As Monostable MultivibratorDocument5 pages555 Timer As Monostable MultivibratorDarshan BhansaliNo ratings yet
- Linear ICs and TimersDocument15 pagesLinear ICs and TimersSona PrakashNo ratings yet
- Theory:The 555 Timer Configured For Monostable OperationDocument3 pagesTheory:The 555 Timer Configured For Monostable OperationkumararguruNo ratings yet
- N555e Intergrated CircuitDocument6 pagesN555e Intergrated CircuitGeorge Boman SethNo ratings yet
- 1.automatic Electrical Phase Change OverDocument47 pages1.automatic Electrical Phase Change OvermboomiNo ratings yet
- ODL Lab7 2018EE69Document7 pagesODL Lab7 2018EE69Ali MohsinNo ratings yet
- List The Features of 555 TimersDocument3 pagesList The Features of 555 TimersDivyesh DivakarNo ratings yet
- Analog and Digital IC Applications Lab ManualDocument80 pagesAnalog and Digital IC Applications Lab ManualsubbuNo ratings yet
- Burglar Alarm ProjectDocument4 pagesBurglar Alarm ProjectAvik PathakNo ratings yet
- 555 Timer Integrated CircuitDocument8 pages555 Timer Integrated CircuitTalha WaqarNo ratings yet
- Chapter 4 TimerDocument33 pagesChapter 4 TimerLian Ai ChenNo ratings yet
- IC 555 Multivibrator CircuitsDocument11 pagesIC 555 Multivibrator CircuitsKaran YadavNo ratings yet
- The 555 Timer IC (Adapted From) : CaseDocument12 pagesThe 555 Timer IC (Adapted From) : CaseBiswajit Sarkar100% (1)
- 555 Timer: by D.V.Kamat, Faculty Department of E&C Engg., MITDocument21 pages555 Timer: by D.V.Kamat, Faculty Department of E&C Engg., MITRupsa SahaNo ratings yet
- Laboratory E-Sources - Second Year B - Tech IV SEM (ECE)Document142 pagesLaboratory E-Sources - Second Year B - Tech IV SEM (ECE)Chen-Wei LiangNo ratings yet
- EE 213 Experiment 9: Design and Study Multi-vibrators Using 555 Timer ICDocument5 pagesEE 213 Experiment 9: Design and Study Multi-vibrators Using 555 Timer ICMuhammad SameerNo ratings yet
- University of Engineering and Technology, Lahore Department of Electrical EngineeringDocument5 pagesUniversity of Engineering and Technology, Lahore Department of Electrical EngineeringMuhammad SameerNo ratings yet
- Ic 555 Astable Circuit: TheoryDocument5 pagesIc 555 Astable Circuit: TheorySYEDMOOSA RAZANo ratings yet
- Ec 4112: Analog Communication Laboratory List of Experiments: Compulsory ExperimentsDocument68 pagesEc 4112: Analog Communication Laboratory List of Experiments: Compulsory ExperimentsArchit SrivastavaNo ratings yet
- 555 Timer IC-Block Diagram-Working-Pin Out Configuration-Data SheetDocument13 pages555 Timer IC-Block Diagram-Working-Pin Out Configuration-Data SheetΔημητριος ΣταθηςNo ratings yet
- 555 TimerDocument28 pages555 TimerNisha Kotyan G RNo ratings yet
- The Important Features of The 555 Timer AreDocument7 pagesThe Important Features of The 555 Timer ArePathella SudhakarNo ratings yet
- Ic 555Document25 pagesIc 555Ahmed SaȜed El-HadyNo ratings yet
- Introduction To IC 555 TimerDocument66 pagesIntroduction To IC 555 TimermuraliNo ratings yet
- 555Document80 pages555elpasanteNo ratings yet
- Multi VibratorDocument6 pagesMulti VibratorAhie CherianNo ratings yet
- Module 1Document44 pagesModule 1secondaryaccaccNo ratings yet
- A Mono Stable Multi Vibrato 1Document4 pagesA Mono Stable Multi Vibrato 1Noemi CaluzaNo ratings yet
- 6.1 IC555 TIMER: Circuit ComponentsDocument8 pages6.1 IC555 TIMER: Circuit ComponentsManish PradhanNo ratings yet
- IC 741 Op Amp Specifications and ApplicationsDocument90 pagesIC 741 Op Amp Specifications and ApplicationsAhmed Al MansurNo ratings yet
- Operation 555 Timer/OscillatorDocument7 pagesOperation 555 Timer/OscillatoryuvakiraniNo ratings yet
- Electronics Lab ManualDocument92 pagesElectronics Lab ManualVolodya SmolyakNo ratings yet
- ME 455/555 - Lab 2 - 555 TimersDocument10 pagesME 455/555 - Lab 2 - 555 TimersGustavo KernNo ratings yet
- SE/NE 555 Timer. It Is Basically A Monolithic Timing Circuit That Produces Accurate and Highly Stable Time Delays orDocument12 pagesSE/NE 555 Timer. It Is Basically A Monolithic Timing Circuit That Produces Accurate and Highly Stable Time Delays orEFraim Manzano FranciscoNo ratings yet
- Ica Withoutreadingsmanual PDFDocument90 pagesIca Withoutreadingsmanual PDFKimharly VersozaNo ratings yet
- 555 IC timer operation guideDocument5 pages555 IC timer operation guideGeet SehgalNo ratings yet
- Slua 080Document24 pagesSlua 080HauvuNo ratings yet
- Wireless I CDocument3 pagesWireless I CkenbobalajiNo ratings yet
- 555 Timer Guide: IC Pinout & Working PrincipleDocument1 page555 Timer Guide: IC Pinout & Working PrinciplePraveen KumarNo ratings yet
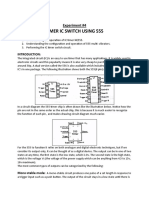
- Timer Ic Switch Using 555: Experiment #4Document7 pagesTimer Ic Switch Using 555: Experiment #4Zeeshan RafiqNo ratings yet
- 555 TimerDocument76 pages555 TimerSai Krishna KodaliNo ratings yet
- Electronics Exercise 2: The 555 Timer and It's Applications: ObjectiveDocument5 pagesElectronics Exercise 2: The 555 Timer and It's Applications: ObjectiveMichael AjayiNo ratings yet
- Lect15 AnalogICDocument15 pagesLect15 AnalogICsayemeeceNo ratings yet
- Raising Leaders: BJT Biasing Circuits ExplainedDocument19 pagesRaising Leaders: BJT Biasing Circuits ExplainedObaloluwa SowandeNo ratings yet
- Op AmpDocument57 pagesOp AmpDivyanshu Yadav100% (1)
- A Fractional-N PLL Frequency Synthesizer DesignDocument4 pagesA Fractional-N PLL Frequency Synthesizer Designmohan sardarNo ratings yet
- Telescopic PDFDocument8 pagesTelescopic PDFdemodemo321123No ratings yet
- Chapter 4 - RF Oscillators and Frequency SynthesizersDocument57 pagesChapter 4 - RF Oscillators and Frequency SynthesizersTrungExNo ratings yet
- Ssgmce, Shegaon. Department of Electronics and Telecommunication Lesson PlanDocument33 pagesSsgmce, Shegaon. Department of Electronics and Telecommunication Lesson PlanAshish SharmaNo ratings yet
- Lecture 2e Common Emitter AmplifierDocument24 pagesLecture 2e Common Emitter AmplifierPhạm Minh KhôiNo ratings yet
- Electronic Devices: FloydDocument40 pagesElectronic Devices: FloydJoannaNo ratings yet
- Chapter 5 - Ele232 - Feb11 (Compatibility Mode) PDFDocument7 pagesChapter 5 - Ele232 - Feb11 (Compatibility Mode) PDFkavish malakaNo ratings yet
- Practice Question and You WillDocument5 pagesPractice Question and You WillAyush NinaweNo ratings yet
- BJT Small Signal AnalysisDocument58 pagesBJT Small Signal AnalysisBryan TuazonNo ratings yet
- Electrical Circuits (EEE-141) Chapter-7: Series-Parallel Circuits Book: Robert L Boylestad, 12 Edition Summer - 2020 Prof. K. M. A. Salam (KAS)Document7 pagesElectrical Circuits (EEE-141) Chapter-7: Series-Parallel Circuits Book: Robert L Boylestad, 12 Edition Summer - 2020 Prof. K. M. A. Salam (KAS)Sudipto Sarker SuptoNo ratings yet
- Cedes Gls 126 Manual enDocument3 pagesCedes Gls 126 Manual enDenis RibeiroNo ratings yet
- Design and analysis of a CE voltage biased amplifierDocument6 pagesDesign and analysis of a CE voltage biased amplifierPhelix PheloNo ratings yet
- EE352L Experiment N# 1 Objectives: 1.1 Pre-LabDocument3 pagesEE352L Experiment N# 1 Objectives: 1.1 Pre-LabYassine DjillaliNo ratings yet
- Feedback AmplifiersDocument4 pagesFeedback Amplifiersbetoy00No ratings yet
- Practical Switched CapacitorDocument27 pagesPractical Switched CapacitorNikhil KumarNo ratings yet
- U1 L5 Biasing in MOS Amplifier Circuits.Document6 pagesU1 L5 Biasing in MOS Amplifier Circuits.Shivani ParhadNo ratings yet
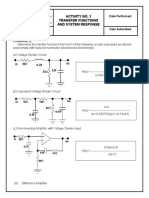
- Activity No. 3 Transfer Functions and System Response: - Date PerformedDocument4 pagesActivity No. 3 Transfer Functions and System Response: - Date PerformedSM MecregNo ratings yet
- 18 Ec 421Document3 pages18 Ec 421Srujana PurohitNo ratings yet
- PDF Active Tilt Eq PCB - CompressDocument1 pagePDF Active Tilt Eq PCB - CompressDaniel OfoeNo ratings yet
- Electronic CircuitsDocument4 pagesElectronic Circuitskeshab pandeyNo ratings yet
- شرح الكترونيات 1 AmplifiersDocument43 pagesشرح الكترونيات 1 AmplifiersAboodA.KhraishiNo ratings yet
- Analog Electronics July 2017 (2015 Scheme)Document3 pagesAnalog Electronics July 2017 (2015 Scheme)Movies and tv showsNo ratings yet
- How to Properly Bias Op-Amps for Optimal PerformanceDocument11 pagesHow to Properly Bias Op-Amps for Optimal PerformancevasiliyNo ratings yet
- Schematic and Layout Design of a Differential Amplifier CircuitDocument9 pagesSchematic and Layout Design of a Differential Amplifier CircuitFrancisco De KamimoreNo ratings yet
- XP3000 Power Amplifier Service ManualDocument32 pagesXP3000 Power Amplifier Service Manualdudoso100% (2)
- THEORY For Wein Bridge Oscillator Using Ic 741 Op AmpDocument1 pageTHEORY For Wein Bridge Oscillator Using Ic 741 Op AmpPurnima Sri Sai100% (1)
- Lecture 10Document22 pagesLecture 10mkrasanNo ratings yet