You might also like
- Design and of Four-Stroke Engines: SimulationDocument23 pagesDesign and of Four-Stroke Engines: SimulationCarl Konan100% (1)
- Aprilia Sportcity Cube 250 - 300Document258 pagesAprilia Sportcity Cube 250 - 300Manualles67% (3)
- Man B&W 6S60MC 706Document70 pagesMan B&W 6S60MC 706Ishan Bhatnagar100% (4)
- Determination of OD Cooling System Parameters Based On Thermal Modeling of Power Transformer WindingDocument12 pagesDetermination of OD Cooling System Parameters Based On Thermal Modeling of Power Transformer Windingmpu682No ratings yet
- c1 1Document301 pagesc1 1Liza Cabalquinto LorejoNo ratings yet
- D-22 Engine MechanicalDocument136 pagesD-22 Engine MechanicalJose Figueroa60% (5)
- Parts Manual 7042 Series 2 ESM - Form 6311-2 (2016)Document180 pagesParts Manual 7042 Series 2 ESM - Form 6311-2 (2016)dfmolina100% (1)
- CAT Compression Brake Lash - AdjustDocument2 pagesCAT Compression Brake Lash - Adjustbenge henrique100% (2)
- English Series60Document1,685 pagesEnglish Series60AzizeArif100% (3)
- The 4A-GE Block: A Submission by Richard WhiteDocument9 pagesThe 4A-GE Block: A Submission by Richard WhiteJohn Phillpotts100% (2)
- Mini 'Prince' EngineDocument24 pagesMini 'Prince' Enginehypertools100% (2)
- Turbocharger PerformanceDocument106 pagesTurbocharger Performanceashwynvinay_90182279100% (3)
- Chapter 10 - Heat Transfer in EnginesDocument35 pagesChapter 10 - Heat Transfer in EnginesB NinhNo ratings yet
- Heat Transfer Modeling of A Diesel EngineDocument34 pagesHeat Transfer Modeling of A Diesel EngineMiltosNo ratings yet
- Medidas de Temp en DevanadosDocument1 pageMedidas de Temp en DevanadosFernando LoteroNo ratings yet
- Cad Simulation kj-66 TurbineDocument13 pagesCad Simulation kj-66 TurbineL11r1100% (1)
- Knock Characteristics of Dual-Fuel Combustion in Diesel Engines Using Natural Gas As Primary FuelDocument8 pagesKnock Characteristics of Dual-Fuel Combustion in Diesel Engines Using Natural Gas As Primary FuelMohammad SafreedNo ratings yet
- Turbocharger Heat FlowsDocument6 pagesTurbocharger Heat FlowsRichart TPNo ratings yet
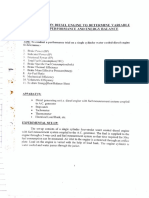
- Le:Trial On Diesel Engine To Determine Variable: Load Performance and Energy BalanceDocument3 pagesLe:Trial On Diesel Engine To Determine Variable: Load Performance and Energy BalanceKhaire SushomNo ratings yet
- CFD Study of Fluid Flow and Temperature DistributiDocument5 pagesCFD Study of Fluid Flow and Temperature DistributiДенис ЛяпуновNo ratings yet
- Heat Exchanger NetworkDocument34 pagesHeat Exchanger NetworkrovshanbabayevNo ratings yet
- Assignment No. - 1Document4 pagesAssignment No. - 1Vedant KarnatakNo ratings yet
- Wiryanta 2018 J. Phys. Conf. Ser. 953 012060Document8 pagesWiryanta 2018 J. Phys. Conf. Ser. 953 012060vinodNo ratings yet
- Applied Thermodynamics EME401Document2 pagesApplied Thermodynamics EME401Manhar MidhaNo ratings yet
- Heat Pipe in HvacDocument11 pagesHeat Pipe in HvacOmkar ChavanNo ratings yet
- 2016-Exhaust Valve Analysis PDFDocument14 pages2016-Exhaust Valve Analysis PDFAniq Syazwan IINo ratings yet
- Applied Thermal Engineering: F. Illán, M. AlarcónDocument7 pagesApplied Thermal Engineering: F. Illán, M. Alarcónpurrab divakarNo ratings yet
- PP Lab Manual 2015Document20 pagesPP Lab Manual 2015Abdul Fatir Khan100% (1)
- Effect of Ignition Timing On Fuel Consumption and EmissionsDocument11 pagesEffect of Ignition Timing On Fuel Consumption and Emissionsjlee_296737No ratings yet
- Oesse HY Catalog enDocument104 pagesOesse HY Catalog enAlejandroCalleRuizNo ratings yet
- Small Gas Turbine GTM-120 BenchDocument8 pagesSmall Gas Turbine GTM-120 BenchFurqanNo ratings yet
- Misdariis AuteurDocument11 pagesMisdariis AuteurjagicisiwoNo ratings yet
- Improve The Efficiency of Heat Exchanger in Oil CoolerDocument29 pagesImprove The Efficiency of Heat Exchanger in Oil CoolerMuhammad RustamNo ratings yet
- Reactor Sizing FinalDocument34 pagesReactor Sizing FinalJobb Six-steps MatheusNo ratings yet
- Heat Transfer in The Cylinder of A New Two-Stroke Cross-Scavenged EngineDocument7 pagesHeat Transfer in The Cylinder of A New Two-Stroke Cross-Scavenged EngineRajendra JadhavNo ratings yet
- Experimental and Comparison Study of Heat Transfer Characteristics of Wickless Heat Pipes by Using Various Heat InputsDocument12 pagesExperimental and Comparison Study of Heat Transfer Characteristics of Wickless Heat Pipes by Using Various Heat InputsIJRASETPublicationsNo ratings yet
- Fuel NozzlesDocument3 pagesFuel Nozzlesfrancisco_navas4479100% (1)
- Prediction of Heat Transfer To The Walls in Direct Injection (DI) Diesel EnginesDocument16 pagesPrediction of Heat Transfer To The Walls in Direct Injection (DI) Diesel EnginespeterNo ratings yet
- Performance Analysis of Single Cylinder SI Engine 1Document7 pagesPerformance Analysis of Single Cylinder SI Engine 1Debarshi BaruahNo ratings yet
- Trial On Reciprocating.Document12 pagesTrial On Reciprocating.zen tenNo ratings yet
- Issn: 2349-3860Document18 pagesIssn: 2349-3860Pat TejNo ratings yet
- Manajemen Termal Heat Sink Pada Modul Kendali Motor Kendaraan HibridDocument5 pagesManajemen Termal Heat Sink Pada Modul Kendali Motor Kendaraan HibridKusmara MarmarNo ratings yet
- Heat Transfer Modeling of A Diesel EngineDocument34 pagesHeat Transfer Modeling of A Diesel EngineAbdullah OmerNo ratings yet
- ME212Document17 pagesME212FarhanNo ratings yet
- Renewable Energy: Chin-Hsiang Cheng, Ying-Ju YuDocument12 pagesRenewable Energy: Chin-Hsiang Cheng, Ying-Ju YuWernher BraunNo ratings yet
- Fired Heater ModelingDocument19 pagesFired Heater ModelingAhmed Elhady100% (1)
- IES CONV Mechanical Engineering 1985Document8 pagesIES CONV Mechanical Engineering 1985coolpawan10No ratings yet
- Test de RadiadorDocument10 pagesTest de RadiadorOmar Reinoso TigreNo ratings yet
- ContentServer PDFDocument7 pagesContentServer PDFBriyith MondragonNo ratings yet
- Heat Transfer in Laminar FlowDocument6 pagesHeat Transfer in Laminar Flowanil chejaraNo ratings yet
- NR-222001-Thermal Engineering and Heat TransferDocument8 pagesNR-222001-Thermal Engineering and Heat TransferSrinivasa Rao GNo ratings yet
- 1 s2.0 S1359431105001523 Main PDFDocument11 pages1 s2.0 S1359431105001523 Main PDFDamianCurcanNo ratings yet
- CFD Analysis of Petrol Internal Combustion Engine: Mechanical Engineering University of Technology, Baghdad-IraqDocument17 pagesCFD Analysis of Petrol Internal Combustion Engine: Mechanical Engineering University of Technology, Baghdad-IraqDikra BkNo ratings yet
- Small Scale ORC Plant Modeling With The AMESim Simulation ToolDocument10 pagesSmall Scale ORC Plant Modeling With The AMESim Simulation ToolÜlkü Serçin SerçinoğluNo ratings yet
- Ex - No: Date: Heat Balance Test On 4-Stroke Single Cylinder Diesel Engine AimDocument6 pagesEx - No: Date: Heat Balance Test On 4-Stroke Single Cylinder Diesel Engine AimPrashant Mansubrao JondhaleNo ratings yet
- Heat Balance Diesel Rope Brake-6Document3 pagesHeat Balance Diesel Rope Brake-6Arup NaskarNo ratings yet
- Heat Power EngineeringDocument2 pagesHeat Power Engineeringsameer_m_daniNo ratings yet
- MEE2003 Laboratory FAT Question PaperDocument4 pagesMEE2003 Laboratory FAT Question PaperKartik ChaturvediNo ratings yet
- Sub ReportDocument17 pagesSub ReportpachieduNo ratings yet
- Fired Heater CO Emission Study ReportDocument15 pagesFired Heater CO Emission Study Reportchemical509No ratings yet
- Chemcad Batch ReactorsDocument26 pagesChemcad Batch ReactorsCüneyt Gökhan Tosun0% (1)
- IC4.4 AnoushPoursartipDocument10 pagesIC4.4 AnoushPoursartipLuis Daniel RodríguezNo ratings yet
- Exp 2 Performance Parameter of Diesel EngineDocument7 pagesExp 2 Performance Parameter of Diesel EngineShashwat JainNo ratings yet
- Investigation of Operational and Design Parameters Affecting The Thermal Behaviour of Disc-Type WindingDocument9 pagesInvestigation of Operational and Design Parameters Affecting The Thermal Behaviour of Disc-Type WindingДенис ЛяпуновNo ratings yet
- A Stirling Engine For Automotive ApplicationsDocument7 pagesA Stirling Engine For Automotive ApplicationsJoão SidônioNo ratings yet
- Fapej LD: (A08051: Roll No. Total No. of Questions: Ti91 (Total No. of Pages: 02 ('U'Lt'Lua ' Allsctlloct+Yt' 'Eltm IDocument2 pagesFapej LD: (A08051: Roll No. Total No. of Questions: Ti91 (Total No. of Pages: 02 ('U'Lt'Lua ' Allsctlloct+Yt' 'Eltm ItransendenceNo ratings yet
- 03 Literature ReviewDocument7 pages03 Literature ReviewViria ClaviosNo ratings yet
- Me3 At1 Dec07Document3 pagesMe3 At1 Dec07transendenceNo ratings yet
- Toyota GR Series EnginesDocument37 pagesToyota GR Series EnginesNgô Đức Thọ100% (4)
- Testing Method For SuspensionDocument131 pagesTesting Method For SuspensionAliNo ratings yet
- Technical Manual: Adjustable ShocksDocument32 pagesTechnical Manual: Adjustable ShocksdNo ratings yet
- 1 Power&EnergyDocument23 pages1 Power&EnergyarielaNo ratings yet
- 30 40 PDFDocument584 pages30 40 PDFNicoNo ratings yet
- 2013 Golf, GTI & Golf R Quick Reference Specification Book PDFDocument276 pages2013 Golf, GTI & Golf R Quick Reference Specification Book PDFjohnnyheathersonNo ratings yet
- 12 Gasoline EnginesDocument9 pages12 Gasoline EnginesVictor Lo Dastek UnichipNo ratings yet
- SSP445 The Sharan 2011Document56 pagesSSP445 The Sharan 2011gil_cs100% (3)
- ATS ComBased Training - PPTX MONDocument155 pagesATS ComBased Training - PPTX MONDEATHSTAR GAMINGNo ratings yet
- Simulation of Automotive Engine in Lotus Simulation Tools: Transfer Inovácií 30/2014 2014Document5 pagesSimulation of Automotive Engine in Lotus Simulation Tools: Transfer Inovácií 30/2014 2014RahulNo ratings yet
- Chapter 1 Diesel Engine With SupplementDocument18 pagesChapter 1 Diesel Engine With SupplementCleanard HidalgoNo ratings yet
- 3.a New Tool For Combustion ResearchDocument7 pages3.a New Tool For Combustion ResearchRaviVelugulaNo ratings yet
- DTS PDFDocument28 pagesDTS PDFsumitNo ratings yet
- Diagnostic Exam Part I. Test BDocument21 pagesDiagnostic Exam Part I. Test BMikko Jan CorpuzNo ratings yet
- Engine Problems and TestsDocument42 pagesEngine Problems and TestsBiniyamNo ratings yet
- Me6016 TeDocument44 pagesMe6016 TeKALIMUTHU KNo ratings yet
- Comparative Study of Four Stroke Diesel and Petrol EngineDocument7 pagesComparative Study of Four Stroke Diesel and Petrol EnginepandiyaNo ratings yet
- Robin h17Document83 pagesRobin h17mihai37No ratings yet
- Engine PerformanceDocument34 pagesEngine PerformancesureshNo ratings yet
- Repair Manual: EngineDocument136 pagesRepair Manual: Engineygor valdezNo ratings yet