You might also like
- Interrupt Numbers and NVIC RegistersDocument15 pagesInterrupt Numbers and NVIC Registerspotato moon berryNo ratings yet
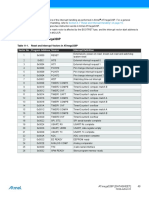
- Interrupts: 11.1 Interrupt Vectors in Atmega328PDocument1 pageInterrupts: 11.1 Interrupt Vectors in Atmega328PnamerNo ratings yet
- 4 Experiment 4 Interrupt and I/O InterfacingDocument17 pages4 Experiment 4 Interrupt and I/O InterfacingSuhas NipaneNo ratings yet
- Topic 11 - ATMega32 Interrupt in C (ISMAIL - FKEUTM 2018)Document60 pagesTopic 11 - ATMega32 Interrupt in C (ISMAIL - FKEUTM 2018)Aya AmirNo ratings yet
- Interrupts: Lecture# 13 Microprocessor Systems and InterfacingDocument16 pagesInterrupts: Lecture# 13 Microprocessor Systems and InterfacingMahreenNo ratings yet
- LPC2148 Microcontroller Architecture andDocument50 pagesLPC2148 Microcontroller Architecture andManikandan AnnamalaiNo ratings yet
- Bootrst Ivsel Reset Address Interrupt Vectors Start AddressDocument1 pageBootrst Ivsel Reset Address Interrupt Vectors Start AddressnamerNo ratings yet
- EP - Unit - V - Real World Interfacing With Cortex M4 Based MicrocontrollerDocument114 pagesEP - Unit - V - Real World Interfacing With Cortex M4 Based Microcontrollerganesh SawantNo ratings yet
- GUI LPC2103 Cau Trúc Phàn C NGDocument104 pagesGUI LPC2103 Cau Trúc Phàn C NGBắc HoàiNo ratings yet
- Power Point PresentationDocument17 pagesPower Point PresentationVNo ratings yet
- AC6921A Datasheet: Zhuhai Jieli Technology Co.,LTDDocument15 pagesAC6921A Datasheet: Zhuhai Jieli Technology Co.,LTDpsychopatic24No ratings yet
- Pin No. Pin Name Description Alternate FunctionDocument7 pagesPin No. Pin Name Description Alternate FunctionnareshhhhhNo ratings yet
- IC 045 Embedded Sys Design PPT 5Document51 pagesIC 045 Embedded Sys Design PPT 5RajendraPrasadSahuNo ratings yet
- 1 - Analog To Digital Conversion in LPC2129Document4 pages1 - Analog To Digital Conversion in LPC2129imbharteshNo ratings yet
- AC6901A DatasheetDocument13 pagesAC6901A DatasheetIgor LevochkinNo ratings yet
- ARM STM32L476 Parallel IODocument20 pagesARM STM32L476 Parallel IOSorin NicolaNo ratings yet
- Program ESC 2019Document8 pagesProgram ESC 2019Aris100% (1)
- AC6903B规格书V1 0Document10 pagesAC6903B规格书V1 0ghNo ratings yet
- Featues All Signals of GPIO Connection of Signals On A Port Flowchart Input and Output of GPIODocument40 pagesFeatues All Signals of GPIO Connection of Signals On A Port Flowchart Input and Output of GPIOIchada PhamNo ratings yet
- Project MikroprosesorDocument4 pagesProject MikroprosesorNawNo ratings yet
- Nama: Gunawan: Kelas: 5ADocument4 pagesNama: Gunawan: Kelas: 5ANawNo ratings yet
- UartDocument3 pagesUartvishwajeet.zambre22No ratings yet
- CED19I032Document13 pagesCED19I032Pranavram VNo ratings yet
- AT89C1051 ManualDocument14 pagesAT89C1051 Manualprakov_komesNo ratings yet
- stk6032 Ds v1Document105 pagesstk6032 Ds v1Lenin LobatiNo ratings yet
- AVR Microcontroller TestDocument9 pagesAVR Microcontroller TestNiranjan AgravatNo ratings yet
- 02 Mts-Z80a-EbDocument195 pages02 Mts-Z80a-EbTEFTI Universitas PertaminaNo ratings yet
- 8-Bit Microcontroller With 2K Bytes Flash AT89C2051: FeaturesDocument15 pages8-Bit Microcontroller With 2K Bytes Flash AT89C2051: FeaturesSo Was RedNo ratings yet
- HWMonitorDocument29 pagesHWMonitoragustinNo ratings yet
- CED19I032Document18 pagesCED19I032Pranavram VNo ratings yet
- Sesion 4Document5 pagesSesion 4gaosrock1234No ratings yet
- 5 InterruptsDocument9 pages5 InterruptsTam PhamNo ratings yet
- AC6921A8Document15 pagesAC6921A8Rafael BrunoNo ratings yet
- Embedded SystemsDocument12 pagesEmbedded SystemsAl-Amin BhuiyanNo ratings yet
- AC6901A规格书V1 2Document13 pagesAC6901A规格书V1 2ghNo ratings yet
- AC6900A规格书V1 2Document14 pagesAC6900A规格书V1 2ghNo ratings yet
- Development Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Document13 pagesDevelopment Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Thông NguyễnNo ratings yet
- Bitm Arm Lab ManualDocument18 pagesBitm Arm Lab ManualPriya PydeeNo ratings yet
- CSDVCXVFDXGBVFDGFDFSDFGFDGFCGGCF Gjhghfgjjmgxjgdjpin No. Pin Name Description Alternate FunctionDocument8 pagesCSDVCXVFDXGBVFDGFDFSDFGFDGFCGGCF Gjhghfgjjmgxjgdjpin No. Pin Name Description Alternate FunctionnareshhhhhNo ratings yet
- HWMonitorDocument15 pagesHWMonitornzy182No ratings yet
- At 89c2051 DataDocument20 pagesAt 89c2051 Datarangana rathnayakaNo ratings yet
- 8051 FAQsDocument5 pages8051 FAQsprashant goreNo ratings yet
- CME331: Microprocessor, 2018-19, Term 1 Assignment 3: 10 MarksDocument3 pagesCME331: Microprocessor, 2018-19, Term 1 Assignment 3: 10 MarksMahirChoudhuryNo ratings yet
- 10 Interrupt v22Document29 pages10 Interrupt v22Pipat NakasenoNo ratings yet
- Microprocessors & Interfacing: Tutorial 10 Timers & 8259Document25 pagesMicroprocessors & Interfacing: Tutorial 10 Timers & 8259Hemant DhamijaNo ratings yet
- CED19I032Document13 pagesCED19I032Pranavram VNo ratings yet
- Experiment#7: Question#1Document7 pagesExperiment#7: Question#1jameeshudsonNo ratings yet
- Evd19i018-Esdp Lab 9Document18 pagesEvd19i018-Esdp Lab 9Jampani sarath chandraNo ratings yet
- 89c51 Raining Cou Week1Document33 pages89c51 Raining Cou Week1api-3761333No ratings yet
- Xddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgfvnbvnvnvn B: Descriptio N Alternate FunctionDocument8 pagesXddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgfvnbvnvnvn B: Descriptio N Alternate FunctionnareshhhhhNo ratings yet
- CSDVCXVFDXGBVFDGFDFSDFGFDGFCGGCF Gjhghfgjjmgxjgdjpin No. Pin Name Description Alternate FunctionDocument8 pagesCSDVCXVFDXGBVFDGFDFSDFGFDGFCGGCF Gjhghfgjjmgxjgdjpin No. Pin Name Description Alternate FunctionnareshhhhhNo ratings yet
- AC6905A JieliDocument10 pagesAC6905A JieliDARWYN MAURICIO HERNANDEZ JUAREZNo ratings yet
- Record 6-11Document25 pagesRecord 6-11girinath0508No ratings yet
- Ac6905a DatasheepDocument10 pagesAc6905a DatasheepMUSIC ELECNo ratings yet
- Emb Lab ManualDocument73 pagesEmb Lab ManualBharath RamanNo ratings yet
- Pin No. Pin Name Description Alternate FunctionDocument6 pagesPin No. Pin Name Description Alternate FunctionnareshhhhhNo ratings yet
- Mcp23008 App NoteDocument10 pagesMcp23008 App NoteHarold LeeNo ratings yet
- Ch11 AVR Serial Port ProgrammingDocument25 pagesCh11 AVR Serial Port ProgrammingSimple knowledgeNo ratings yet
- Microprocessor Architectures and Systems: RISC, CISC and DSPFrom EverandMicroprocessor Architectures and Systems: RISC, CISC and DSPRating: 4 out of 5 stars4/5 (1)
- SIFANG CSC-150EB V1.03 Busbar Protection IED Manual 2019-11Document186 pagesSIFANG CSC-150EB V1.03 Busbar Protection IED Manual 2019-11MarkusKunNo ratings yet
- Lecture 05 PIC Microcontroller Interrupts and EEPROM Data MemoryDocument7 pagesLecture 05 PIC Microcontroller Interrupts and EEPROM Data MemoryJpricarioNo ratings yet
- 16 Bit CalculatorDocument17 pages16 Bit CalculatorPankaj JaiswalNo ratings yet
- User Manual: QX Connect SeriesDocument16 pagesUser Manual: QX Connect SeriesEL BAY abdelfattahNo ratings yet
- ESD AssignmentDocument3 pagesESD Assignmentsantosh vighneshwar hegdeNo ratings yet
- FUGI PLC ManualDocument493 pagesFUGI PLC Manualpratik100% (1)
- Computer System Architecture MCQ Bank PDFDocument106 pagesComputer System Architecture MCQ Bank PDFbheemsinghsaini100% (1)
- PIC16F628Document30 pagesPIC16F628Prince YehyaNo ratings yet
- Infineon-AURIX Safety Management Unit Quick-Training-v01 00-ENDocument8 pagesInfineon-AURIX Safety Management Unit Quick-Training-v01 00-ENJulio Cesar Tapia ReyesNo ratings yet
- ASTRA V1.2 Operators ManualDocument44 pagesASTRA V1.2 Operators ManualWissam RgailyNo ratings yet
- Functions, InterruptsDocument37 pagesFunctions, InterruptsPrasanna KumarNo ratings yet
- Gate-Cs 2005Document31 pagesGate-Cs 2005tomundaNo ratings yet
- ARM7Document36 pagesARM7Yogesh SutharNo ratings yet
- Symantec NetBackup 5230 Appliance and Symantec Storage Shelf Product DescriptionDocument39 pagesSymantec NetBackup 5230 Appliance and Symantec Storage Shelf Product Descriptionjarg200690No ratings yet
- A'Level Past Exam PapersDocument127 pagesA'Level Past Exam PapersMichael Myambo100% (1)
- Advanced PLC NoteDocument30 pagesAdvanced PLC NoteJayesh GunawardanaNo ratings yet
- Computer Organization NotesDocument214 pagesComputer Organization NotesvinayakakvNo ratings yet
- Input Output Organization Question AnswerDocument33 pagesInput Output Organization Question AnswerSukanta BoseNo ratings yet
- Operating Systems Interview Questions You'll Most Likely Be AskedDocument22 pagesOperating Systems Interview Questions You'll Most Likely Be AskedVibrant PublishersNo ratings yet
- Architecture of PIC16F84ADocument31 pagesArchitecture of PIC16F84AYuvaraj Maganathan0% (1)
- Visteon PaperDocument23 pagesVisteon Paperramanareddygv100% (1)
- Schematic Diagram of Ip Camera With EthernetDocument18 pagesSchematic Diagram of Ip Camera With EthernetnguyenminhtuanengineNo ratings yet
- Appendixf (PC Error Codes Beeps and Diagnostic Message)Document34 pagesAppendixf (PC Error Codes Beeps and Diagnostic Message)NaeemSiddiquiNo ratings yet
- WT2605 Bluetooth Voice Chip Specification: NoteDocument13 pagesWT2605 Bluetooth Voice Chip Specification: NoteAndres CamachoiNo ratings yet
- 10 GB Ethernet Mark Wagner: Senior Software Engineer, Red HatDocument58 pages10 GB Ethernet Mark Wagner: Senior Software Engineer, Red HatDmitriy IlchenkoNo ratings yet
- RTOS Slides UCOS IIDocument139 pagesRTOS Slides UCOS IIgrhvg_mct8224No ratings yet
- Unit Iv Advanced Microprocessor Notes PDFDocument73 pagesUnit Iv Advanced Microprocessor Notes PDFPadmanaban MNo ratings yet
- Em78p153s PDFDocument54 pagesEm78p153s PDFMarian MarinNo ratings yet
- Project Report On Dtmf....Document57 pagesProject Report On Dtmf....Anshu Kumar91% (11)
- Chapter II. Process Management: 2.1 OverviewDocument17 pagesChapter II. Process Management: 2.1 OverviewRediet BadieNo ratings yet