You might also like
- Bennett Mechanical Aptitude & Spatial Reasoning Test Study GuideDocument4 pagesBennett Mechanical Aptitude & Spatial Reasoning Test Study Guideridwantp33% (3)
- Matrix Methods for Advanced Structural AnalysisFrom EverandMatrix Methods for Advanced Structural AnalysisRating: 5 out of 5 stars5/5 (1)
- Finite Element Analysis for Design Engineers, Second EditionFrom EverandFinite Element Analysis for Design Engineers, Second EditionNo ratings yet
- Physics GlossaryDocument21 pagesPhysics GlossaryKing VaibhavNo ratings yet
- Mechanism Design With Pro EDocument14 pagesMechanism Design With Pro EBertrandMezatioNo ratings yet
- Diesel Common Rail Injection Electronic Components ExplainedFrom EverandDiesel Common Rail Injection Electronic Components ExplainedRating: 3.5 out of 5 stars3.5/5 (7)
- Einstein and Newton View On GravitationDocument30 pagesEinstein and Newton View On GravitationZahid Iftikhar AhmadNo ratings yet
- Mechanical Design Animation TutorialDocument16 pagesMechanical Design Animation TutorialAnonymous pMVR77x1No ratings yet
- Pro-Mechanica Motion PDFDocument17 pagesPro-Mechanica Motion PDFperosuttoneNo ratings yet
- Mechanism BookDocument118 pagesMechanism BookothmanNo ratings yet
- Literature Review of RotorDocument120 pagesLiterature Review of RotorMojtaba HasanluNo ratings yet
- KMDocument120 pagesKMsady1967No ratings yet
- Finite Element Approach For Study of Torsional and Bending Effect On Four Cylinder Engine CrankshaftsDocument13 pagesFinite Element Approach For Study of Torsional and Bending Effect On Four Cylinder Engine CrankshaftsMaiman LatoNo ratings yet
- 5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemDocument14 pages5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemImpact JournalsNo ratings yet
- Multibody Dynamic Analysis and Simulation of Engine ModelDocument9 pagesMultibody Dynamic Analysis and Simulation of Engine ModelMiguel Rueda CuerdaNo ratings yet
- FEM Modeling Project: Evaluation of A Steel Pulley-and-Shaft DesignDocument4 pagesFEM Modeling Project: Evaluation of A Steel Pulley-and-Shaft DesignMuhammad Hussain BilalNo ratings yet
- Introductory Tutorial: Solidworks Motion and Finite Element Analysis (Fea) SimulationDocument12 pagesIntroductory Tutorial: Solidworks Motion and Finite Element Analysis (Fea) SimulationMWFirmansyahNo ratings yet
- Kinematics - Design of Mechanisms: IntroductionDocument26 pagesKinematics - Design of Mechanisms: IntroductionChhote Lal GuptaNo ratings yet
- Measurement and Analysis of The Dynamics of Mechanical StructuresDocument51 pagesMeasurement and Analysis of The Dynamics of Mechanical StructuresOscar Daga CaravantesNo ratings yet
- Can CrusherDocument42 pagesCan CrusherParveen Jaat100% (2)
- Design and Analysis of A Polycentric Prosthetic Knee JointDocument27 pagesDesign and Analysis of A Polycentric Prosthetic Knee JointMahmood AbuZaidNo ratings yet
- Final ReportDocument20 pagesFinal ReportMuhammad Hussain Bilal100% (1)
- Solidworks MotionDocument13 pagesSolidworks MotionJulio Cesar Montoya DelgadoNo ratings yet
- Chapter 1Document83 pagesChapter 1Marc Jairro GajudoNo ratings yet
- The Physics of Suspensions Using Computer SimulationDocument7 pagesThe Physics of Suspensions Using Computer SimulationEric TendianNo ratings yet
- Chapters 1 & 2Document66 pagesChapters 1 & 2Allyth AlqhtaniNo ratings yet
- Multi Cone Synchronizer System A ReviewDocument6 pagesMulti Cone Synchronizer System A ReviewCầu CaoNo ratings yet
- Vibration SchoolDocument194 pagesVibration SchoolHéctor Rivera100% (1)
- Fundamentals of Pulley and WinchesDocument62 pagesFundamentals of Pulley and WinchesvikasgahlyanNo ratings yet
- DME Unit 1 Notes - 2021 RevDocument28 pagesDME Unit 1 Notes - 2021 RevLeo BoyNo ratings yet
- Dani Mechanism CHAPTER 1Document36 pagesDani Mechanism CHAPTER 1daniel hambissaNo ratings yet
- Basic of Dynamic Simulation Auto Desk InventorDocument24 pagesBasic of Dynamic Simulation Auto Desk Inventorranganathan0818No ratings yet
- Bbbbuniversity Questions Bank: Pr8451-Mechanics of MachinesDocument41 pagesBbbbuniversity Questions Bank: Pr8451-Mechanics of MachinesThi KumarNo ratings yet
- 1.1 Introduction of Chassis FrameDocument53 pages1.1 Introduction of Chassis FramegadhireddyNo ratings yet
- MMT 5link 2002Document20 pagesMMT 5link 2002James HillNo ratings yet
- PROJECT 6thDocument67 pagesPROJECT 6thl kumar saiNo ratings yet
- Inno2020 EMT4101 MMD T0Document25 pagesInno2020 EMT4101 MMD T0GhostNo ratings yet
- Research Paper 165577Document13 pagesResearch Paper 165577alberto garciaNo ratings yet
- JyotChoksi PortfolioDocument46 pagesJyotChoksi PortfolioJyot ChoksiNo ratings yet
- What Is VibrationDocument71 pagesWhat Is VibrationFarhan TalibNo ratings yet
- Design and Analysis of Helical Springs in Two Wheeler Suspension SystemDocument10 pagesDesign and Analysis of Helical Springs in Two Wheeler Suspension SystemkrishnaNo ratings yet
- ProE Mechanism NotesDocument41 pagesProE Mechanism NotesAmar ThakurNo ratings yet
- 2008-36-0219 - Balancer Shaft Development For A In-Line 4 Cylinder High Speed Diesel EngineDocument8 pages2008-36-0219 - Balancer Shaft Development For A In-Line 4 Cylinder High Speed Diesel Engineangelus256No ratings yet
- SolidWorks Motion Tutorial 2012Document31 pagesSolidWorks Motion Tutorial 2012Felipe DiazNo ratings yet
- Modeling Torque Transmissibility For Automotive Dry Clutch EngagementDocument9 pagesModeling Torque Transmissibility For Automotive Dry Clutch EngagementJairo GuamantaquiNo ratings yet
- VCS REPORT FinalDocument7 pagesVCS REPORT Finalasd108533No ratings yet
- The Configuration Space Method For Kinematic Design of MechanismsDocument12 pagesThe Configuration Space Method For Kinematic Design of MechanismsEugeny TikhomirovNo ratings yet
- Experiment4 Group3Document43 pagesExperiment4 Group3debojit.dasNo ratings yet
- Epicyclic Gear Train - Diagram, Parts, Working, Advantages, Disadvantages - 1626376441568Document9 pagesEpicyclic Gear Train - Diagram, Parts, Working, Advantages, Disadvantages - 1626376441568Arnold ChafewaNo ratings yet
- Marge Ktom Darshan PDFDocument277 pagesMarge Ktom Darshan PDFjayvik solankiNo ratings yet
- Darshan KTOM CH 1Document25 pagesDarshan KTOM CH 1jayvik solankiNo ratings yet
- Book Pract RDFFBD Chapter-6 PDFDocument90 pagesBook Pract RDFFBD Chapter-6 PDFVILLANUEVA_DANIEL2064No ratings yet
- Book Pract RDFFBD Chapter-6Document90 pagesBook Pract RDFFBD Chapter-6HuongDuongNo ratings yet
- SolidWorks Motion AnalysisDocument37 pagesSolidWorks Motion AnalysisivNo ratings yet
- SolidWorks Motion Study TutorialDocument37 pagesSolidWorks Motion Study TutorialwawanUAINo ratings yet
- Tutorial Tzu-Yu WuDocument12 pagesTutorial Tzu-Yu WuIonut-Catalin DimacheNo ratings yet
- Final Rear Forward Axle Housing SnorkelDocument38 pagesFinal Rear Forward Axle Housing SnorkeltarunNo ratings yet
- ND ND RD RD TH TH THDocument50 pagesND ND RD RD TH TH THsweet2shineNo ratings yet
- Systems Engineering for All: Introduction to Systems Engineering for non-Systems EngineersFrom EverandSystems Engineering for All: Introduction to Systems Engineering for non-Systems EngineersNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Guddu VaiDocument58 pagesGuddu Vaibilash mehediNo ratings yet
- 2324 Cost of AttendanceDocument1 page2324 Cost of Attendancebilash mehediNo ratings yet
- FINAL IMLD Flyer ApprovedDocument1 pageFINAL IMLD Flyer Approvedbilash mehediNo ratings yet
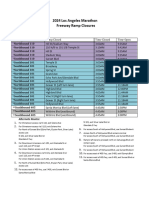
- 2024 LA Marathon Highway ClosuresDocument1 page2024 LA Marathon Highway Closuresbilash mehediNo ratings yet
- Course Work and HomeworkDocument2 pagesCourse Work and Homeworkbilash mehediNo ratings yet
- Work Lessons For StudentsDocument5 pagesWork Lessons For Studentsbilash mehediNo ratings yet
- Supreme & Co. Pvt. LTDDocument35 pagesSupreme & Co. Pvt. LTDbilash mehediNo ratings yet
- MATH 274 Calculus II (4 Units) Course OutlineDocument2 pagesMATH 274 Calculus II (4 Units) Course Outlinebilash mehediNo ratings yet
- Design and Fabrication of Adjustable Multiseasonal Harvesting MachineDocument8 pagesDesign and Fabrication of Adjustable Multiseasonal Harvesting Machinebilash mehediNo ratings yet
- 4-Year Bachelor of Technology (B.Tech.) Curriculum and Syllabus For Mechanical Engineering (ME) Fourth SemesterDocument8 pages4-Year Bachelor of Technology (B.Tech.) Curriculum and Syllabus For Mechanical Engineering (ME) Fourth Semesterbilash mehediNo ratings yet
- MD Bilash Mehedi MechatronicsDocument12 pagesMD Bilash Mehedi Mechatronicsbilash mehediNo ratings yet
- Analysis of Residual Stresses Induced by Mechanical Shot Peening Processes Using The X-Ray Diffraction Technique and Finite Element Method of 2024-T351 Aluminum AlloyDocument5 pagesAnalysis of Residual Stresses Induced by Mechanical Shot Peening Processes Using The X-Ray Diffraction Technique and Finite Element Method of 2024-T351 Aluminum Alloybilash mehediNo ratings yet
- Metals: Investigation of The Shot Size Effect On Residual Stresses Through A 2D FEM Model of The Shot Peening ProcessDocument16 pagesMetals: Investigation of The Shot Size Effect On Residual Stresses Through A 2D FEM Model of The Shot Peening Processbilash mehediNo ratings yet
- 1984 Vol.4-1-Relaxation of SDocument8 pages1984 Vol.4-1-Relaxation of Sbilash mehediNo ratings yet
- Answers of The Three Question by BilashDocument2 pagesAnswers of The Three Question by Bilashbilash mehediNo ratings yet
- 2018380186MDBILASHMEHEDIfatigue Life ModelDocument14 pages2018380186MDBILASHMEHEDIfatigue Life Modelbilash mehediNo ratings yet
- First Home WorkDocument8 pagesFirst Home Workbilash mehediNo ratings yet
- Research Report of FaDocument10 pagesResearch Report of Fabilash mehediNo ratings yet
- Advanced Manufacturing System: Simulation, Optimization and ControlDocument47 pagesAdvanced Manufacturing System: Simulation, Optimization and Controlbilash mehediNo ratings yet
- Lecture 5: Simulation Technology and Manufacturing System SimulationDocument50 pagesLecture 5: Simulation Technology and Manufacturing System Simulationbilash mehediNo ratings yet
- Englishi Case-YeeCall - A Born Global Social Media AppDocument5 pagesEnglishi Case-YeeCall - A Born Global Social Media Appbilash mehediNo ratings yet
- Heraeus Multifuge 4KR-User ManualDocument109 pagesHeraeus Multifuge 4KR-User ManualvaltbattNo ratings yet
- LP (Science 8)Document126 pagesLP (Science 8)mark jay legoNo ratings yet
- SAEEE Physics SyllabusDocument4 pagesSAEEE Physics Syllabusanujars5410% (1)
- What Is %G?: What Is Acceleration? Peak Acceleration? Peak Ground Acceleration (PGA) ? What Is Spectral Acceleration (SA) ?Document9 pagesWhat Is %G?: What Is Acceleration? Peak Acceleration? Peak Ground Acceleration (PGA) ? What Is Spectral Acceleration (SA) ?Pacha Khan KhogyaniNo ratings yet
- 1D Uniform Accn Exercise - 210510 - 104356Document3 pages1D Uniform Accn Exercise - 210510 - 104356guraseesNo ratings yet
- CH 2 ComleteDocument2 pagesCH 2 ComleteAman BhuttaNo ratings yet
- Scientific Notation, Symbols, Units and EquationsDocument15 pagesScientific Notation, Symbols, Units and EquationslethaagathaNo ratings yet
- As 3778.6.3-1992 Measurement of Water Flow in Open Channels Measuring Devices Instruments and Equipment - CalDocument7 pagesAs 3778.6.3-1992 Measurement of Water Flow in Open Channels Measuring Devices Instruments and Equipment - CalSAI Global - APACNo ratings yet
- Chapter No.1 Introduction To PhysicsDocument78 pagesChapter No.1 Introduction To PhysicsAdnan Rais KhanNo ratings yet
- Aqa MM1B W QP Jan10Document8 pagesAqa MM1B W QP Jan10Vishav JeetNo ratings yet
- Friction (Compatibility Mode)Document10 pagesFriction (Compatibility Mode)Mahir MahmoodNo ratings yet
- Liability of Damage CargoDocument12 pagesLiability of Damage CargosaifNo ratings yet
- Acceleration Practice Problems (2) - 2020Document3 pagesAcceleration Practice Problems (2) - 2020KileeshaNo ratings yet
- Acceleration Review! Name: - HRDocument2 pagesAcceleration Review! Name: - HRsohiNo ratings yet
- AccelerationDocument9 pagesAccelerationJennilyn LumacadNo ratings yet
- HW2 SolutionsDocument7 pagesHW2 SolutionsluisNo ratings yet
- Moshe Shoham (Auth.) - A Textbook of Robotics 2 - Structure, Control and Operation-Springer US (1984) PDFDocument266 pagesMoshe Shoham (Auth.) - A Textbook of Robotics 2 - Structure, Control and Operation-Springer US (1984) PDFHarini MrNo ratings yet
- HEDDURIDocument20 pagesHEDDURISoorabhi AragiNo ratings yet
- Physics 101ah - Lesson 3aDocument3 pagesPhysics 101ah - Lesson 3aRonald TantiadoNo ratings yet
- Cameroon General Certificate of Education CompressDocument41 pagesCameroon General Certificate of Education CompressClara MbouNo ratings yet
- Physics Goals v2Document8 pagesPhysics Goals v2saevans18No ratings yet
- L6 - Curves Ranging PDFDocument43 pagesL6 - Curves Ranging PDFAinur NasuhaNo ratings yet
- Activity 4Document6 pagesActivity 4Blesvill BaroroNo ratings yet
- Chapter 4 - Dynamic AnalysisDocument16 pagesChapter 4 - Dynamic AnalysisDimple Sharma100% (1)
- Engineering Mechanics Question Bank - 2021-22Document35 pagesEngineering Mechanics Question Bank - 2021-22Naman JainNo ratings yet
- Cpat 4Document10 pagesCpat 4Shrish PratapNo ratings yet
- Charged ParticlesDocument19 pagesCharged Particlesjonan_evansNo ratings yet