You might also like
- Combinatorial Algorithms: For Computers and CalculatorsFrom EverandCombinatorial Algorithms: For Computers and CalculatorsRating: 4 out of 5 stars4/5 (2)
- Discrete Time Linear SystemsDocument11 pagesDiscrete Time Linear SystemsNarote PrajwalNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- IC6701 May 18 With KeyDocument14 pagesIC6701 May 18 With KeyAnonymous yO7rcec6vuNo ratings yet
- 09-Digital Control SystemsDocument2 pages09-Digital Control Systemssudhakar kNo ratings yet
- Experiment: ObjectiveDocument3 pagesExperiment: ObjectiveVivek PatelNo ratings yet
- Control Systems Theory and Design: ExaminationDocument9 pagesControl Systems Theory and Design: ExaminationLuis CarvalhoNo ratings yet
- 446-08 Block Diagrams (N) - HandoutDocument7 pages446-08 Block Diagrams (N) - HandoutFrancisco HurtadoNo ratings yet
- Week 5 6 Control Systems Signal Flow GraphsDocument39 pagesWeek 5 6 Control Systems Signal Flow GraphsMuhammad AhmadNo ratings yet
- Lecture-Mg-7-Rugi Tramisi-PrintDocument7 pagesLecture-Mg-7-Rugi Tramisi-PrintVicrewa RewandatredaNo ratings yet
- Digital Control SystemsDocument8 pagesDigital Control SystemsBebo DiaNo ratings yet
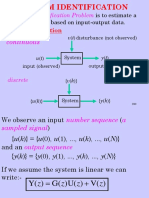
- Continuous: System Identification ProblemDocument41 pagesContinuous: System Identification Problemboulainine houriaNo ratings yet
- Continuous: System Identification ProblemDocument41 pagesContinuous: System Identification Problemboulainine houriaNo ratings yet
- 3D Time Domain Panel Method: by Ranadev DattaDocument25 pages3D Time Domain Panel Method: by Ranadev DattaVictor DaggersNo ratings yet
- Analog and Digital Signal Processing by Ambardar (400 821)Document422 pagesAnalog and Digital Signal Processing by Ambardar (400 821)William's Limonchi Sandoval100% (1)
- Modeling and classification of disturbances in control systemsDocument47 pagesModeling and classification of disturbances in control systemsวินัย เมธาวิทิตNo ratings yet
- Chapter 6 - Random SignalsDocument18 pagesChapter 6 - Random SignalsFrances DiazNo ratings yet
- Unit 7: Control SystemsDocument30 pagesUnit 7: Control SystemsOverloaded SenseNo ratings yet
- DF Lesson 01Document63 pagesDF Lesson 01Karthik BhagavathiNo ratings yet
- WhchenDocument46 pagesWhchenAleksandar MicićNo ratings yet
- 16.323 Principles of Optimal Control: Mit OpencoursewareDocument4 pages16.323 Principles of Optimal Control: Mit OpencoursewareMohand Achour TouatNo ratings yet
- Identification of Linear SystemsDocument21 pagesIdentification of Linear Systemsanon_11806628No ratings yet
- TVTIx Chapter3 EACT631 AdaptiveControl1Document45 pagesTVTIx Chapter3 EACT631 AdaptiveControl1abata yohannesNo ratings yet
- LPVcourse PDFDocument73 pagesLPVcourse PDFYaye RodriguezNo ratings yet
- IC 202324 02 NoiseDocument58 pagesIC 202324 02 NoiseSahan NishshankaNo ratings yet
- Fuzzy Logic Control of Synchronous Generator Under The Condition of Transient Three Phase Short CircuitDocument5 pagesFuzzy Logic Control of Synchronous Generator Under The Condition of Transient Three Phase Short CircuitwilliamNo ratings yet
- LQR Linear Quadratic Regulator: A State Space Optimal Control Technique Brett ShapiroDocument41 pagesLQR Linear Quadratic Regulator: A State Space Optimal Control Technique Brett ShapirorameshsmeNo ratings yet
- 1 - Electronic System Design Chapter 1 To 3 PDFDocument17 pages1 - Electronic System Design Chapter 1 To 3 PDFneda ghiasiNo ratings yet
- 1 - Electronic System Design Chapter 1 To 3Document19 pages1 - Electronic System Design Chapter 1 To 3javeriya DarNo ratings yet
- Ee304 ADocument3 pagesEe304 AAboo FarisNo ratings yet
- Lectures 5 and 6: Dynamics of Low Order Lectures 5 and 6: Dynamics of Low Order SystemsDocument18 pagesLectures 5 and 6: Dynamics of Low Order Lectures 5 and 6: Dynamics of Low Order SystemsPreeti KumariNo ratings yet
- FFTDocument28 pagesFFTFan Wang100% (2)
- Block Diagram Representation: Peter Avitabile Mechanical Engineering Department University of Massachusetts LowellDocument19 pagesBlock Diagram Representation: Peter Avitabile Mechanical Engineering Department University of Massachusetts LowellAnn RazonNo ratings yet
- State Space Description of A Dynamic System: 1. Linear CaseDocument8 pagesState Space Description of A Dynamic System: 1. Linear CaseAnonymous N2c1CpNo ratings yet
- Time Response Characteristics of SystemsDocument8 pagesTime Response Characteristics of SystemskiranNo ratings yet
- SFWR ENG 4A03 Lab 1: Introduction To Labview and Review of Continuous Control SystemsDocument4 pagesSFWR ENG 4A03 Lab 1: Introduction To Labview and Review of Continuous Control Systemskaruneee7003No ratings yet
- Signals and Systems2011suppDocument3 pagesSignals and Systems2011suppAnkan BhuniaNo ratings yet
- Problem Set No. 6: Sabancı University Faculty of Engineering and Natural Sciences Ens 211 - SignalsDocument6 pagesProblem Set No. 6: Sabancı University Faculty of Engineering and Natural Sciences Ens 211 - SignalsGarip KontNo ratings yet
- Discrete-Time Signals and Systems: TopicDocument63 pagesDiscrete-Time Signals and Systems: TopicRogers Rodri ShayoNo ratings yet
- Digital Control Dynamic Systems by - Franklin and PowellDocument176 pagesDigital Control Dynamic Systems by - Franklin and PowellMauricio FuentesNo ratings yet
- 7-Integral Control Handout PDFDocument15 pages7-Integral Control Handout PDFgiacomoNo ratings yet
- Dr. Wenjie Dong: Department of Electrical and Computer Engineering, The University of Texas Rio Grande ValleyDocument17 pagesDr. Wenjie Dong: Department of Electrical and Computer Engineering, The University of Texas Rio Grande ValleyMd Nur-A-Adam DonyNo ratings yet
- Analogfilters UNSW 2009Document48 pagesAnalogfilters UNSW 2009Dimuthu Nuwan AbeysingheNo ratings yet
- L12 LoopShapingDocument26 pagesL12 LoopShapingkazem mokhtariNo ratings yet
- 2.signals & Systems JtoisroDocument20 pages2.signals & Systems JtoisroNarasimhamNo ratings yet
- EE3302Document2 pagesEE3302ashishNo ratings yet
- ELEC30x0 Lab11 Characterization SlidesDocument22 pagesELEC30x0 Lab11 Characterization Slideswww.autovatorNo ratings yet
- TP Sys2Document24 pagesTP Sys2Draw SmailNo ratings yet
- PCE6101 Linear Systems Theory: (Tracking Controller Design)Document31 pagesPCE6101 Linear Systems Theory: (Tracking Controller Design)Birhex FeyeNo ratings yet
- JulyAugust 2021Document2 pagesJulyAugust 2021Narmada BheemaNo ratings yet
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDocument72 pagesKOM 3781 Discrete-Time Control Systems: Veysel GaziFatih CanbolatNo ratings yet
- BCS - 4 - Reduction of Multiple SubsystemsDocument24 pagesBCS - 4 - Reduction of Multiple Subsystemsandik yuliantoNo ratings yet
- 0107 (EC-604 For ECE)Document2 pages0107 (EC-604 For ECE)John SmithNo ratings yet
- Rr411005 Digital Control SystemsDocument8 pagesRr411005 Digital Control SystemsSrinivasa Rao GNo ratings yet
- Lect 4 Non-Linear SystemsDocument10 pagesLect 4 Non-Linear SystemsZaidoon MohsinNo ratings yet
- A = 1 - q^-1; B = 0.5q^-1; d = 2Document60 pagesA = 1 - q^-1; B = 0.5q^-1; d = 2Andrew FongNo ratings yet
- Process Dynamic and Control: HadiyantoDocument112 pagesProcess Dynamic and Control: HadiyantoAtieGg KorNiea BrusHa LupHaNo ratings yet
- r5220206 Control SystemsDocument1 pager5220206 Control SystemssivabharathamurthyNo ratings yet
- Standard LTI Feedback Optimization Setup: 6.245: Multivariable Control Systems by A. MegretskiDocument8 pagesStandard LTI Feedback Optimization Setup: 6.245: Multivariable Control Systems by A. Megretskinishantdon007No ratings yet
- AMIETE – ET/CS/IT (OLD SCHEME) SIGNALS & SYSTEMS EXAM WITH QUESTIONS ON TRANSFORMS, SYSTEMS AND RANDOM PROCESSESDocument4 pagesAMIETE – ET/CS/IT (OLD SCHEME) SIGNALS & SYSTEMS EXAM WITH QUESTIONS ON TRANSFORMS, SYSTEMS AND RANDOM PROCESSESJonas ParreñoNo ratings yet
- SAFA Course A - B - CDocument257 pagesSAFA Course A - B - CamroushararaNo ratings yet
- Airbus GSE Vendor ManualDocument424 pagesAirbus GSE Vendor ManualAbdullah Ahmed Al-Haddad100% (1)
- Engine Stand TableDocument1 pageEngine Stand TableamroushararaNo ratings yet
- A320 CB + ResetsDocument30 pagesA320 CB + ResetsamroushararaNo ratings yet
- Am 2811 2563 - Rev U1352392661Document54 pagesAm 2811 2563 - Rev U1352392661amroushararaNo ratings yet
- Am 2811 2563 - Rev U1352392661Document54 pagesAm 2811 2563 - Rev U1352392661amroushararaNo ratings yet
- AC Checks B777-200Document19 pagesAC Checks B777-200amroushararaNo ratings yet
- Ac Checks B777-IraqDocument1 pageAc Checks B777-IraqamroushararaNo ratings yet
- CFM56-5C Am-2387 - 23881332781490Document23 pagesCFM56-5C Am-2387 - 23881332781490amroushararaNo ratings yet
- AC - Checks A330-300Document5 pagesAC - Checks A330-300amroushararaNo ratings yet
- PW4090 ENGINE STAND PN 180059 Rev D Complete1294939830Document61 pagesPW4090 ENGINE STAND PN 180059 Rev D Complete1294939830amroushararaNo ratings yet
- PN 181745-4 Cradle PW4090 ManualDocument39 pagesPN 181745-4 Cradle PW4090 ManualamroushararaNo ratings yet
- AC - Checks A300-B4Document7 pagesAC - Checks A300-B4amroushararaNo ratings yet
- Ac Checks B737-AlxDocument2 pagesAc Checks B737-AlxamroushararaNo ratings yet
- AC - Checks A330-IRAQDocument1 pageAC - Checks A330-IRAQamroushararaNo ratings yet
- AC - Checks A321-231Document14 pagesAC - Checks A321-231amroushararaNo ratings yet
- Ac - Checks Erj 170 (Petro Air)Document3 pagesAc - Checks Erj 170 (Petro Air)amroushararaNo ratings yet
- 11.In-Flight HebrewDocument20 pages11.In-Flight HebrewamroushararaNo ratings yet
- AC - Checks A320-232 SU-GCDDocument4 pagesAC - Checks A320-232 SU-GCDamroushararaNo ratings yet
- AC - Checks A300-600Document4 pagesAC - Checks A300-600amroushararaNo ratings yet
- AC - Checks A321-IRAQDocument3 pagesAC - Checks A321-IRAQamroushararaNo ratings yet
- CH 12 FiguresDocument11 pagesCH 12 FiguresamroushararaNo ratings yet
- AC - Checks A320-232Document16 pagesAC - Checks A320-232amroushararaNo ratings yet
- CH 9 FiguresDocument13 pagesCH 9 FiguresamroushararaNo ratings yet
- Cosplay FitnessDocument3 pagesCosplay FitnessamroushararaNo ratings yet
- Delta Airlines A Strategic AnalysisDocument30 pagesDelta Airlines A Strategic AnalysisJohn SmithNo ratings yet
- CH 10 FiguresDocument11 pagesCH 10 FiguresamroushararaNo ratings yet
- CH 11 FiguresDocument11 pagesCH 11 FiguresamroushararaNo ratings yet
- CH 14 FiguresDocument10 pagesCH 14 FiguresamroushararaNo ratings yet
- CH 8 FiguresDocument12 pagesCH 8 FiguresamroushararaNo ratings yet
- Verilog HDLDocument193 pagesVerilog HDLMahmoud Ayman IbrahimNo ratings yet
- Automatic Vending Machine Prototype Model: ISSN: 0974-2115Document5 pagesAutomatic Vending Machine Prototype Model: ISSN: 0974-2115Amar ThakurNo ratings yet
- CSEAnnexDocument6 pagesCSEAnnexaripermana002No ratings yet
- Communication and Networking Concepts Full FormsDocument22 pagesCommunication and Networking Concepts Full Formsspicypoova_899586184No ratings yet
- FC 360 Sales Presentation PDFDocument37 pagesFC 360 Sales Presentation PDFMinh NguyễnNo ratings yet
- Solar Panel Basics: A Guide to Photovoltaic ModulesDocument6 pagesSolar Panel Basics: A Guide to Photovoltaic ModulesbabarNo ratings yet
- Omicron HVCirciutBreakerTestingDocument55 pagesOmicron HVCirciutBreakerTestingsurag1982100% (1)
- Tripp Lite SMART1500LCD Manual PDFDocument2 pagesTripp Lite SMART1500LCD Manual PDFvixor08No ratings yet
- ARR Broschuere Antenna-Guide 1809 13Document28 pagesARR Broschuere Antenna-Guide 1809 13jlcamargomadridistaNo ratings yet
- Brosur Singer PFCDocument3 pagesBrosur Singer PFCPutu Agus SantosaNo ratings yet
- Division Tech Quiz EASYDocument2 pagesDivision Tech Quiz EASYlmendoza_soriano0% (1)
- Circuits 1: Series and Parallel Resistors, Voltage and Current DivisionDocument15 pagesCircuits 1: Series and Parallel Resistors, Voltage and Current DivisionKuroha KokonoseNo ratings yet
- Page 58Document1 pagePage 58Abhishek ShatagopachariNo ratings yet
- Instruction Sheet 734 111: Set of Machines 10 WDocument2 pagesInstruction Sheet 734 111: Set of Machines 10 WBassmala BaraaNo ratings yet
- Class - 2, Computer, Chapter - 2 (Use of Computers)Document4 pagesClass - 2, Computer, Chapter - 2 (Use of Computers)Mitan DebnathNo ratings yet
- BCC M425-0000-1A-003-VX44T2-050 Ordercode: BCC05TJ: Single-Ended CordsetsDocument2 pagesBCC M425-0000-1A-003-VX44T2-050 Ordercode: BCC05TJ: Single-Ended Cordsetsarnal18No ratings yet
- Polycrystalline Solar Module: An Everexceed High-Power Residential Solar Module Isan Aesthetic To Most Roofs AdditionDocument2 pagesPolycrystalline Solar Module: An Everexceed High-Power Residential Solar Module Isan Aesthetic To Most Roofs AdditionAmrina RosyadaNo ratings yet
- Micro 8050 Operating and Safety InstructionDocument92 pagesMicro 8050 Operating and Safety InstructionpruebapabloNo ratings yet
- Fermi Distribution Function, Effect of Temperature On Fermi FunctionDocument2 pagesFermi Distribution Function, Effect of Temperature On Fermi Functionjainam sharma100% (2)
- Sony kdl-19l4000 26l4000 Nex ChassisDocument47 pagesSony kdl-19l4000 26l4000 Nex Chassissweet boy play boyNo ratings yet
- Iso7816 1Document8 pagesIso7816 1brunetNo ratings yet
- LMU-2100™ Gprs/Cdmahspa Series: Insurance Tracking Unit With Leading TechnologiesDocument2 pagesLMU-2100™ Gprs/Cdmahspa Series: Insurance Tracking Unit With Leading TechnologiesRobert MateoNo ratings yet
- Z Fuse - c1d2 - Fusing (Phoenix Contact Theory)Document4 pagesZ Fuse - c1d2 - Fusing (Phoenix Contact Theory)theloniussherekNo ratings yet
- Cador 300 - Manual de OperacionDocument99 pagesCador 300 - Manual de OperacionAndreyna BreaNo ratings yet
- Pre Lab1Document7 pagesPre Lab1Fakhir ShahNo ratings yet
- Optical Materials: Optical Properties of Chiral Single-Walled Carbon Nanotubes Thin FilmsDocument9 pagesOptical Materials: Optical Properties of Chiral Single-Walled Carbon Nanotubes Thin FilmsWini NafisyahNo ratings yet
- HP ColorLJ9500 MFP SMDocument574 pagesHP ColorLJ9500 MFP SMcwalters7No ratings yet
- Electrical System PDFDocument2 pagesElectrical System PDFKent WaiNo ratings yet
- PF ArcDocument1 pagePF Arcrafik1995No ratings yet
- Magnetic Float Switch For Vertical Installation Model FLS: (Models With Ex Approval: 60, AL-ADF)Document18 pagesMagnetic Float Switch For Vertical Installation Model FLS: (Models With Ex Approval: 60, AL-ADF)we202No ratings yet