You might also like
- Use of Mechatronic System To Manufacture Spiral Bevel Gear Using 3-Axis CNC Milling MachineDocument5 pagesUse of Mechatronic System To Manufacture Spiral Bevel Gear Using 3-Axis CNC Milling MachinetuongnvNo ratings yet
- Manual of Engineering Drawing: British and International StandardsFrom EverandManual of Engineering Drawing: British and International StandardsRating: 3.5 out of 5 stars3.5/5 (4)
- Optimal Tool Path Generation and Cutter Geometry Design For Five-Axis CNC Flank Milling of Spiral Bevel GearsDocument16 pagesOptimal Tool Path Generation and Cutter Geometry Design For Five-Axis CNC Flank Milling of Spiral Bevel Gears林北煎包侠No ratings yet
- Visualization Process For Design and Man 221005 061931Document4 pagesVisualization Process For Design and Man 221005 061931Trung ThanhNo ratings yet
- A General Mathematical Model For Two-Parameter GeneratingDocument15 pagesA General Mathematical Model For Two-Parameter GeneratingFranciscoGarciaNo ratings yet
- Tool Path Optimization of Contouring Operation and Machining Strategies For Turbo Machinery BladesDocument7 pagesTool Path Optimization of Contouring Operation and Machining Strategies For Turbo Machinery BladesseventhsensegroupNo ratings yet
- Mathematical Modelling of Power Skiving For General Pro Le Based On Numerical EnvelopingDocument29 pagesMathematical Modelling of Power Skiving For General Pro Le Based On Numerical Enveloping马懿No ratings yet
- Materials 14 04848Document16 pagesMaterials 14 04848Tiên ThủyNo ratings yet
- Geometrical Modeling of Rotary Milling Operation of Crankshaft PinsDocument10 pagesGeometrical Modeling of Rotary Milling Operation of Crankshaft PinsMuhammad Bachtiar YusufNo ratings yet
- Spiral Bevel Gears Face Roughness Prediction ProduDocument20 pagesSpiral Bevel Gears Face Roughness Prediction ProduLucio MárquezNo ratings yet
- Machining of Steam Turbine Blade On 5-Axis CNC Machine: SciencedirectDocument7 pagesMachining of Steam Turbine Blade On 5-Axis CNC Machine: SciencedirectMido MoussaNo ratings yet
- Design and Fabrication of Mini 5 Axis CNC Machine For Gemstone CarvingDocument5 pagesDesign and Fabrication of Mini 5 Axis CNC Machine For Gemstone CarvingBi LoNo ratings yet
- 10 PDFDocument11 pages10 PDFRyanNo ratings yet
- 1 s2.0 S0307904X1300379X MainDocument10 pages1 s2.0 S0307904X1300379X MainPradita FirmansyahNo ratings yet
- Design Modeling, Simulation of Spur Gear Analysis of Spur GearsDocument12 pagesDesign Modeling, Simulation of Spur Gear Analysis of Spur GearsVaibhavNo ratings yet
- Mains EngineeringDocument6 pagesMains EngineeringRuman KhanNo ratings yet
- Influence of Process Parameters and Robot Postures On Surface Quality in Robotic MachiningDocument17 pagesInfluence of Process Parameters and Robot Postures On Surface Quality in Robotic Machining无名No ratings yet
- Research On The Tooth Modification in Gear SkivingDocument9 pagesResearch On The Tooth Modification in Gear SkivingRZW RNo ratings yet
- Duel Side Sapher PDFDocument9 pagesDuel Side Sapher PDFsageetha756No ratings yet
- Samuthra Projects PDFDocument9 pagesSamuthra Projects PDFsageetha756No ratings yet
- Technological and Simulative Analysis of Power SkivingDocument6 pagesTechnological and Simulative Analysis of Power SkivingFernando OteroNo ratings yet
- Ali 2021 IOP Conf. Ser. Mater. Sci. Eng. 1094 012005Document14 pagesAli 2021 IOP Conf. Ser. Mater. Sci. Eng. 1094 012005Yashvant SinghNo ratings yet
- Optimization of Machining Parameters in CNC Milling Machine Using Taguchi MethodDocument11 pagesOptimization of Machining Parameters in CNC Milling Machine Using Taguchi MethodAllaboyinamahidharNo ratings yet
- Design and Analysis of Globoidal Cam Index DriveDocument6 pagesDesign and Analysis of Globoidal Cam Index DriveijsretNo ratings yet
- Hashemian 2020Document12 pagesHashemian 2020lzq8306No ratings yet
- Electronics 12 01281Document14 pagesElectronics 12 01281Агил АхмедовNo ratings yet
- Gear Skiving ProcessDocument8 pagesGear Skiving ProcessrethinamkNo ratings yet
- 5 Axis Milling PerformanceDocument8 pages5 Axis Milling PerformanceHamza RehmanNo ratings yet
- CAD-based Simulation of The Hobbing ProcessDocument11 pagesCAD-based Simulation of The Hobbing ProcessGabriel MariusNo ratings yet
- Sub 1Document6 pagesSub 1Aye Chan AungNo ratings yet
- Design and Fabrication of 3-Axes Mini CNC Milling MachineDocument15 pagesDesign and Fabrication of 3-Axes Mini CNC Milling MachinePavaniNo ratings yet
- ArticleText 387200 1 10 20190807Document11 pagesArticleText 387200 1 10 20190807Daniel felipe Ariza carranzaNo ratings yet
- Ijetr011305 PDFDocument4 pagesIjetr011305 PDFerpublicationNo ratings yet
- Icram19 10 01 19 06 10 57 ModifiedDocument7 pagesIcram19 10 01 19 06 10 57 ModifiedAjit ParwaniNo ratings yet
- Design Analysis Manufacturing of Disc Brake IJERTV10IS060173Document10 pagesDesign Analysis Manufacturing of Disc Brake IJERTV10IS060173Romiel CaballeroNo ratings yet
- Advanced Computer Aided Design Simulation of GearDocument8 pagesAdvanced Computer Aided Design Simulation of GearRZW RNo ratings yet
- New Siemens Applications For Designing Bevel Gears: IOP Conference Series: Materials Science and EngineeringDocument9 pagesNew Siemens Applications For Designing Bevel Gears: IOP Conference Series: Materials Science and EngineeringPavansatya AdabalaNo ratings yet
- Tool Path Optimization of Contouring Operation and Machining Strategies For Turbo Machinery BladesDocument8 pagesTool Path Optimization of Contouring Operation and Machining Strategies For Turbo Machinery BladesODEH ABU YAHIANo ratings yet
- Cad by BiomedicalDocument20 pagesCad by BiomedicalAshish RajNo ratings yet
- Development of Canned Cycle For CNC Milling Machine: AbstractDocument9 pagesDevelopment of Canned Cycle For CNC Milling Machine: AbstractandreNo ratings yet
- 625 1Document12 pages625 1tuongnvNo ratings yet
- Modelingof Worm GearDocument12 pagesModelingof Worm Gearkarthik venkatachalamNo ratings yet
- 1 s2.0 S1000936118303571 MainDocument10 pages1 s2.0 S1000936118303571 MaininakiNo ratings yet
- An Efficient Spur Gear Shaping Method Based On Homogenizing Cutting Area Through Variational Circular Feed RateDocument15 pagesAn Efficient Spur Gear Shaping Method Based On Homogenizing Cutting Area Through Variational Circular Feed RateTemesgen HenokNo ratings yet
- Gear Hobbing SimuationDocument22 pagesGear Hobbing SimuationleilaNo ratings yet
- 09-1256 - Virtual Process Systems For Part Machining OperationsDocument21 pages09-1256 - Virtual Process Systems For Part Machining OperationsAnte DabroNo ratings yet
- Comparison of Manufacturing Data Analysis For 5 3Document6 pagesComparison of Manufacturing Data Analysis For 5 3Joss JossNo ratings yet
- Shi 2013Document6 pagesShi 2013amirbakhtiary97No ratings yet
- Tsiafis 2018 IOP Conf. Ser. Mater. Sci. Eng. 393 012066Document11 pagesTsiafis 2018 IOP Conf. Ser. Mater. Sci. Eng. 393 012066QC Gishnu Gears Unit IINo ratings yet
- Researching The CNC-Machine Stiffness Impact On The Grinding Cycle DesignDocument6 pagesResearching The CNC-Machine Stiffness Impact On The Grinding Cycle DesignFahmi NurjananiNo ratings yet
- Klocke Kroemer ICG15Document11 pagesKlocke Kroemer ICG15ranim najibNo ratings yet
- Comparative Analysis of Face Milling in Dry and Wet Condition of Al 8011 For Minimum Surface Roughness in Face MillingDocument10 pagesComparative Analysis of Face Milling in Dry and Wet Condition of Al 8011 For Minimum Surface Roughness in Face MillingIJRASETPublicationsNo ratings yet
- Design and Development of Four Way Hacksaw Machine: Umesh Nachan Rohit Singh Rutij PhaltankarDocument4 pagesDesign and Development of Four Way Hacksaw Machine: Umesh Nachan Rohit Singh Rutij PhaltankarPankaj GautamNo ratings yet
- Zhong Etal IJAC 2019 Toolpath Interpolation and Smoothing For Computer Numerical Control MachiningDocument16 pagesZhong Etal IJAC 2019 Toolpath Interpolation and Smoothing For Computer Numerical Control MachiningHenryNo ratings yet
- An Efficient Spur Gear Shaping Method Based On Homogenizing Cutting Area Through Variational Circular Feed RateDocument13 pagesAn Efficient Spur Gear Shaping Method Based On Homogenizing Cutting Area Through Variational Circular Feed RateTemesgen HenokNo ratings yet
- 2007 - Application of Net Shape and Near Net Shape Forming Technologies in ManufactureDocument18 pages2007 - Application of Net Shape and Near Net Shape Forming Technologies in ManufactureNguyen Hoang DungNo ratings yet
- Applying Computer Aided Designing For Steam Turbine BladeDocument6 pagesApplying Computer Aided Designing For Steam Turbine Blademishranamit2211100% (1)
- Finite Element Analysis of High-Speed Motorized Spindle Based OnDocument10 pagesFinite Element Analysis of High-Speed Motorized Spindle Based Onsunil481No ratings yet
- Semi - Outer Thread Cutting MachineDocument4 pagesSemi - Outer Thread Cutting MachineTechnico TechnocratsNo ratings yet
- AutoLift AL-6254A Installation ManualDocument35 pagesAutoLift AL-6254A Installation ManualΠερικλής ΖυγούραςNo ratings yet
- Av PDFDocument118 pagesAv PDFenmanuel de js gomezNo ratings yet
- P12 - Automatic Air ConditionerDocument146 pagesP12 - Automatic Air ConditionerΠερικλής ΖυγούραςNo ratings yet
- P12 - Body Control SystemDocument42 pagesP12 - Body Control SystemΠερικλής ΖυγούραςNo ratings yet
- Idx PDFDocument11 pagesIdx PDFenmanuel de js gomez0% (1)
- P12 - Accelerator Control SystemDocument4 pagesP12 - Accelerator Control SystemΠερικλής ΖυγούραςNo ratings yet
- Torque Measurement With Speed SensorsDocument37 pagesTorque Measurement With Speed SensorsΠερικλής ΖυγούραςNo ratings yet
- 5S Introduction and 5S AreasDocument13 pages5S Introduction and 5S AreasΠερικλής ΖυγούραςNo ratings yet
- Introduction To Load & Price Forecasting Case StudyDocument5 pagesIntroduction To Load & Price Forecasting Case StudyAdin AdinaNo ratings yet
- Gmail - ValueLabs - Interview Call Letter - 6th October 2018Document3 pagesGmail - ValueLabs - Interview Call Letter - 6th October 2018Katikireddi V NareshNo ratings yet
- Omniprox: Proximity Card ReadersDocument2 pagesOmniprox: Proximity Card ReadersShah JeeNo ratings yet
- Exchange 2010 Q&ADocument87 pagesExchange 2010 Q&Akunwar_sdNo ratings yet
- Tourism Management SystemDocument93 pagesTourism Management Systemmayur malviya67% (3)
- BHEL Spec For VFD and Dry Type TransformerDocument93 pagesBHEL Spec For VFD and Dry Type TransformerKarthikeyan GuruNo ratings yet
- Jurnal HidroponikDocument6 pagesJurnal HidroponiknurfadillahmzNo ratings yet
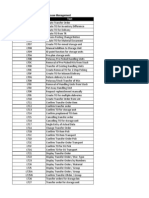
- Warehouse Management TransactionsDocument4 pagesWarehouse Management TransactionsstarimpactNo ratings yet
- Efficia QuickCard CM10 CM12Document2 pagesEfficia QuickCard CM10 CM12Vincent MicallefNo ratings yet
- CMW LTE UE UserManual V3-5-30 en 22Document940 pagesCMW LTE UE UserManual V3-5-30 en 22monel_24671100% (3)
- Schematic, Amplifier Channel, Ex 4000-B Schematic, Amplifier Channel, Ex 4000-BDocument6 pagesSchematic, Amplifier Channel, Ex 4000-B Schematic, Amplifier Channel, Ex 4000-BsolidmfXD1995No ratings yet
- 2013 Excel Advanced ManualDocument188 pages2013 Excel Advanced ManualWasana Gayathree100% (3)
- Controller Micro850Document46 pagesController Micro850Arif SubhiNo ratings yet
- ISGT2019-0191 - Advanced Metering Infraestructure Case Study in Federal University of Santa MariaDocument17 pagesISGT2019-0191 - Advanced Metering Infraestructure Case Study in Federal University of Santa MariaWilliam VizzottoNo ratings yet
- Soft SwitchDocument370 pagesSoft Switchaleksey65No ratings yet
- An-0979-Setling Time of CicDocument4 pagesAn-0979-Setling Time of CicAKHIL C SUNNYNo ratings yet
- 1 Allocation/Scheduling Problem StatementDocument32 pages1 Allocation/Scheduling Problem StatementArindam DasNo ratings yet
- SoC Encounter TutorialDocument18 pagesSoC Encounter Tutorialsyncc500No ratings yet
- Activity 3 THE DATABASE CONCEPTSDocument4 pagesActivity 3 THE DATABASE CONCEPTSRichille SordillaNo ratings yet
- HdfcLogs 20 June 23Document17 pagesHdfcLogs 20 June 23kutta1098mNo ratings yet
- h616 User Manual v1.0 PDFDocument831 pagesh616 User Manual v1.0 PDFVast GsmNo ratings yet
- File Stream Classes:-: Steps of File OperationsDocument28 pagesFile Stream Classes:-: Steps of File OperationscnpnrajaNo ratings yet
- Piling Suite Tutorial Manual 2015 PDFDocument74 pagesPiling Suite Tutorial Manual 2015 PDF汤耀No ratings yet
- 7 VK 61Document18 pages7 VK 61api-241473079No ratings yet
- Rishabh Mehta Resume UpdatedDocument1 pageRishabh Mehta Resume UpdatedNehal ShamsNo ratings yet
- HW 4a Solns PDFDocument7 pagesHW 4a Solns PDFAshwin ShreyasNo ratings yet
- Syndicate BankDocument2 pagesSyndicate BankgyanelexNo ratings yet
- Kali Linux CommandsDocument6 pagesKali Linux Commandsranjan rajaNo ratings yet
- 10.2 Video Games PDFDocument13 pages10.2 Video Games PDFDexter CaroNo ratings yet
- PC200 Brochure UsaDocument6 pagesPC200 Brochure UsaTyler GoodwinNo ratings yet
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 4.5 out of 5 stars4.5/5 (9)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- Complete Electronics Self-Teaching Guide with ProjectsFrom EverandComplete Electronics Self-Teaching Guide with ProjectsRating: 3 out of 5 stars3/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- Collection of Raspberry Pi ProjectsFrom EverandCollection of Raspberry Pi ProjectsRating: 5 out of 5 stars5/5 (1)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- Wearable Sensors: Fundamentals, Implementation and ApplicationsFrom EverandWearable Sensors: Fundamentals, Implementation and ApplicationsEdward SazonovNo ratings yet
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)