You might also like
- Unit I MCQDocument14 pagesUnit I MCQArun Patil100% (3)
- Fluid Mechanics and Darcy's LawDocument51 pagesFluid Mechanics and Darcy's LawUche Ukpai100% (5)
- 1006 1133 PDFDocument17 pages1006 1133 PDFNikos MantzakourasNo ratings yet
- A4........ ACoupled Vibration of A Cantilever Micro-Beam SubmergedDocument10 pagesA4........ ACoupled Vibration of A Cantilever Micro-Beam SubmergedyohannesNo ratings yet
- Hapter 2:-: Potential FlowDocument19 pagesHapter 2:-: Potential FlowAhmed YassenNo ratings yet
- Navier Stokes EquationsDocument17 pagesNavier Stokes EquationsAlice LewisNo ratings yet
- Fluids 2022 Fluids-BasicsDocument16 pagesFluids 2022 Fluids-Basics16 Malola KrishnanNo ratings yet
- Inertial Effects On Flow and Transport in Heterogeneous Porous MediaDocument5 pagesInertial Effects On Flow and Transport in Heterogeneous Porous MediaOscar A. LuévanoNo ratings yet
- Turbulence Modelling SPRING 2023: Viscous TurbulentDocument24 pagesTurbulence Modelling SPRING 2023: Viscous Turbulentweny maurin tamaini sunardiNo ratings yet
- Derivation of Continuity EquationDocument11 pagesDerivation of Continuity EquationManish ShahNo ratings yet
- Fluid Mechanics: Uday Singh M.SC Physics Roll No-165100592 Uday - Singh@iitgn - Ac.in 18 March, 2017Document6 pagesFluid Mechanics: Uday Singh M.SC Physics Roll No-165100592 Uday - Singh@iitgn - Ac.in 18 March, 2017uday singhNo ratings yet
- EuleDocument9 pagesEuleAnand Utsav KapoorNo ratings yet
- Anna University Examinations, Dec. 2014 B.Tech - Chemical Engineering Ch2402 - Transport PhenomenaDocument18 pagesAnna University Examinations, Dec. 2014 B.Tech - Chemical Engineering Ch2402 - Transport Phenomenajeevanantham 5846No ratings yet
- Notes On Fluids CingalaDocument75 pagesNotes On Fluids Cingalaartimus_2kNo ratings yet
- Chapter-3 Fluid DynamicsDocument51 pagesChapter-3 Fluid DynamicsS.M Umer SiddiquiNo ratings yet
- A E E C C S V S S: Nian-Sheng ChengDocument25 pagesA E E C C S V S S: Nian-Sheng ChengqgfreireNo ratings yet
- 2022 PRL Viscosity LJDocument6 pages2022 PRL Viscosity LJ徐睿斌No ratings yet
- 837 10.4171 Ifb 132Document32 pages837 10.4171 Ifb 132appleton416No ratings yet
- L08 Navier StokesDocument7 pagesL08 Navier StokesilmidocumentNo ratings yet
- Euler's Equation Momentum-Flow and Force-Density in Fluid DynamicsDocument11 pagesEuler's Equation Momentum-Flow and Force-Density in Fluid Dynamicsصادق خضير عباس محمدNo ratings yet
- Application of Ergun Equation To Computation of Criticalication oDocument21 pagesApplication of Ergun Equation To Computation of Criticalication oAbdallah abdellaouiNo ratings yet
- Modelling of An Homogeneous Equilibrium Mixture Model (HEM) : A. Bernard-Champmartin J.-M. GhidagliaDocument21 pagesModelling of An Homogeneous Equilibrium Mixture Model (HEM) : A. Bernard-Champmartin J.-M. GhidagliaPedro AlmeidaNo ratings yet
- Ter PDFDocument30 pagesTer PDFAhmed MoustafaNo ratings yet
- Mohammad N. IslamDocument28 pagesMohammad N. IslamNhân NguyễnNo ratings yet
- Hydrodynamics PDFDocument16 pagesHydrodynamics PDFAnonymous oP2vaB50% (2)
- Fluid MechanicsDocument5 pagesFluid MechanicsDEEPAK TNo ratings yet
- Logarithmic Velocity ProfileDocument12 pagesLogarithmic Velocity ProfileHemant KuralkarNo ratings yet
- Fluid Mechanics (MR 231) Lecture Notes (8) Fluid Kinematics: X X V VDocument6 pagesFluid Mechanics (MR 231) Lecture Notes (8) Fluid Kinematics: X X V VAhmedTahaNo ratings yet
- Zhan 1996Document12 pagesZhan 1996Eduardo EnríquezNo ratings yet
- EMR 2325 Fluid Mechanics II Part1Document29 pagesEMR 2325 Fluid Mechanics II Part1queenmutheu01No ratings yet
- Entropy: Stochastic Thermodynamics of Brownian MotionDocument17 pagesEntropy: Stochastic Thermodynamics of Brownian MotionPhieta Fairusy FitriaNo ratings yet
- Convective Mass TransferDocument13 pagesConvective Mass TransferAriadne ChuaNo ratings yet
- Group 5: Chapter 6: Interphase Transport in Isothermal Systems 6.1 Definition of Friction FactorsDocument18 pagesGroup 5: Chapter 6: Interphase Transport in Isothermal Systems 6.1 Definition of Friction Factorssaravthen0% (1)
- Lecture Notes in Fluid Mechanics: Laurent Schoeffel, CEA SaclayDocument98 pagesLecture Notes in Fluid Mechanics: Laurent Schoeffel, CEA SaclaycnjoyusNo ratings yet
- Jeans InstabilityDocument6 pagesJeans InstabilityClaudio Cofré MansillaNo ratings yet
- Convective Mass Transfer PDFDocument14 pagesConvective Mass Transfer PDFAnonymous 4XZYsImTW5100% (1)
- Nash Notes On FluidsDocument75 pagesNash Notes On FluidsAnonymous 9rJe2lOskxNo ratings yet
- Chapter One Basic Concepts From Fluid Dynamics and Thermodynamics 1.1 Definitions - Gas DynamicsDocument5 pagesChapter One Basic Concepts From Fluid Dynamics and Thermodynamics 1.1 Definitions - Gas DynamicsHaider SalmanNo ratings yet
- Journal of Theoretics: Viscosity and Cohesion PressureDocument5 pagesJournal of Theoretics: Viscosity and Cohesion PressureandraaaaapmNo ratings yet
- Ch06 - Supp Derivation of Convection Transfer EquationsDocument16 pagesCh06 - Supp Derivation of Convection Transfer EquationsVibhanshu VermaNo ratings yet
- Suplemento Incropera PDFDocument16 pagesSuplemento Incropera PDFaxel_oscNo ratings yet
- Differential Relations For A Fluid ParticleDocument34 pagesDifferential Relations For A Fluid ParticleTusanita MapuolaNo ratings yet
- A Two Phase Model CavitationDocument11 pagesA Two Phase Model CavitationThePrius0% (1)
- Chapter 1Document33 pagesChapter 1徐郁真No ratings yet
- Big-Bounce CosmologyDocument35 pagesBig-Bounce CosmologySac EndlichNo ratings yet
- Dimensional Analysis and Hydraulic SimilitudeDocument9 pagesDimensional Analysis and Hydraulic SimilitudeinsaneabhayNo ratings yet
- NOE0415380416 ch042Document7 pagesNOE0415380416 ch042Umed Abd-alsatarNo ratings yet
- Slides For Chapter 4 FM1 2023-24Document88 pagesSlides For Chapter 4 FM1 2023-24ABDUL WAHABNo ratings yet
- Artificial Viscosity HansteenDocument10 pagesArtificial Viscosity HansteenChandan Kumar SidhantNo ratings yet
- Liquid Spacetime (Aether) Viscosity, A Way To Unify PhysicsDocument9 pagesLiquid Spacetime (Aether) Viscosity, A Way To Unify Physicsnegara pokerNo ratings yet
- Miscible Viscous Fingering: Application in Chromatographic Columns and AquifersDocument6 pagesMiscible Viscous Fingering: Application in Chromatographic Columns and Aquifersorlando pomaNo ratings yet
- Ingham2004Document11 pagesIngham2004Talal GhanemNo ratings yet
- Viscous Flow Around Spherical Particles in Different ArrangementsDocument11 pagesViscous Flow Around Spherical Particles in Different ArrangementsLuis RiosNo ratings yet
- 09 StructureFormation 1Document33 pages09 StructureFormation 1João SenaNo ratings yet
- REE IffusionDocument38 pagesREE IffusionLeillane BeatrizNo ratings yet
- Viscosity: DSC 1D (GE T4) Waves and OpticsDocument6 pagesViscosity: DSC 1D (GE T4) Waves and OpticsFavourite MoviesNo ratings yet
- Thesis ReportDocument15 pagesThesis ReportTabish ShibliNo ratings yet
- Analysis of Fluid-Structure Interactions - A Direct Symmetric Coupled Formulation Based On A Fluid Velocity PotentialDocument12 pagesAnalysis of Fluid-Structure Interactions - A Direct Symmetric Coupled Formulation Based On A Fluid Velocity Potentialpaulovribeiro100% (1)
- Iv PDFDocument41 pagesIv PDFEd Gar YundaNo ratings yet
- Trans-Membrane Pressure in Nanofiltration: J. Gilron, N. Daltrophe, O. KedemDocument8 pagesTrans-Membrane Pressure in Nanofiltration: J. Gilron, N. Daltrophe, O. KedemAdhe MarthaNo ratings yet
- AD.5.I... Cetop 5: Automatic Reciprocating ValvesDocument1 pageAD.5.I... Cetop 5: Automatic Reciprocating ValvesLuka JelovčanNo ratings yet
- Me 311 Plates Compilation Danreb PeritDocument5 pagesMe 311 Plates Compilation Danreb PeritRika MaeNo ratings yet
- Humidification and DryingDocument36 pagesHumidification and Dryingnivedhitha100% (1)
- Section Cover Page: Section 15399 Sprinkler System 2005-02-08 Inspection, Testing, and MaintenanceDocument5 pagesSection Cover Page: Section 15399 Sprinkler System 2005-02-08 Inspection, Testing, and MaintenancekusdiyantaNo ratings yet
- List of 100 Proposals Approved by DFPD UnderDocument7 pagesList of 100 Proposals Approved by DFPD UnderNarayan KambleNo ratings yet
- Gauge Root Valves Series Grv11Document6 pagesGauge Root Valves Series Grv11Uzair AnsariNo ratings yet
- Sizing Chiller Water TankDocument4 pagesSizing Chiller Water TankDhetak Pramudiyawan Nugroho100% (1)
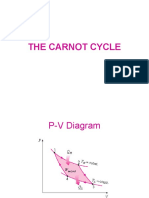
- The Carnot CycleDocument9 pagesThe Carnot CyclePatrick Antonio Orge ChingNo ratings yet
- 4a Instruments P&T 10-15-01Document35 pages4a Instruments P&T 10-15-01Javier GarcíaNo ratings yet
- Density of Water TablesDocument1 pageDensity of Water TablesHaha ZazaNo ratings yet
- Update On Secondary Refrigerants For Indirect Systems: January 2000Document12 pagesUpdate On Secondary Refrigerants For Indirect Systems: January 2000Nevena AksićNo ratings yet
- Material List PDFDocument231 pagesMaterial List PDFMangleshMishraNo ratings yet
- R744 Guide Parts 1 2 3Document182 pagesR744 Guide Parts 1 2 3alessandro silvaNo ratings yet
- Glossary of Boiler Terms and DefinitionsDocument27 pagesGlossary of Boiler Terms and DefinitionsmadodandembeNo ratings yet
- CHM2 Q3 0202 Phase DiagramsDocument27 pagesCHM2 Q3 0202 Phase DiagramsKyu AmeriNo ratings yet
- Hydrologic RoutingDocument21 pagesHydrologic Routingselemonchanie345No ratings yet
- Engineers House Fire Fighting Course FP 03Document92 pagesEngineers House Fire Fighting Course FP 03Mahmoud Abdelghafar ElhussienyNo ratings yet
- En 1991-1-5Document3 pagesEn 1991-1-5Wong Teck ChoongNo ratings yet
- LNG Feed Pretreatment TechnologyDocument6 pagesLNG Feed Pretreatment TechnologyCSNo ratings yet
- DISCFLO Sanitary BrochureDocument8 pagesDISCFLO Sanitary BrochureyusufNo ratings yet
- Chemistry Lesson 21Document5 pagesChemistry Lesson 21Ali HaidarNo ratings yet
- Fluent-Adv-rm 14.5 L01 IntroDocument12 pagesFluent-Adv-rm 14.5 L01 Introlegend guraraNo ratings yet
- Plumbing Bank 5 PDFDocument10 pagesPlumbing Bank 5 PDFTeox100% (1)
- Fluid Mechanics and Hydraulic MachinesDocument3 pagesFluid Mechanics and Hydraulic Machinesvp0209198860% (5)
- 6th SEM - Sep-22Document4 pages6th SEM - Sep-22Jay RanjanNo ratings yet
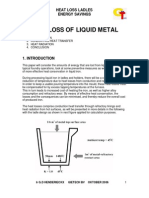
- Heat Loss of Liquid MetalDocument7 pagesHeat Loss of Liquid Metalmarcotulio123No ratings yet
- Bab 12 Perhitungan Proses PembakaranDocument32 pagesBab 12 Perhitungan Proses PembakaranRicardo Aries Boy TariganNo ratings yet