You might also like
- Serial Interfaces I2C, Spi, I2SDocument37 pagesSerial Interfaces I2C, Spi, I2Seugen lupu100% (2)
- M9 SMDocument13 pagesM9 SMMusitec AutorizadaNo ratings yet
- K To 12 Electronics Learning ModuleDocument153 pagesK To 12 Electronics Learning ModuleHari Ng Sablay86% (57)
- Practical Data Acquisition for Instrumentation and Control SystemsFrom EverandPractical Data Acquisition for Instrumentation and Control SystemsNo ratings yet
- Construcción de Detector de MetalesDocument12 pagesConstrucción de Detector de Metalesgerardo100% (2)
- Embedded System Architecture SlidesDocument40 pagesEmbedded System Architecture SlidesKiran Tk100% (1)
- Serial Communication Bus-Interface (Unit3)Document44 pagesSerial Communication Bus-Interface (Unit3)Surekha PittaNo ratings yet
- DDCO Mod - 2Document36 pagesDDCO Mod - 2pavan gowda tsNo ratings yet
- Ddco Module 4 NotesDocument17 pagesDdco Module 4 NotesSai Kishan .sNo ratings yet
- Unit5 CompleteDocument99 pagesUnit5 CompleteAman SinghNo ratings yet
- Introduction To I/O: American Internaional University - BangladeshDocument16 pagesIntroduction To I/O: American Internaional University - BangladeshTawhid KhondakarNo ratings yet
- Microcontroller BasicsDocument19 pagesMicrocontroller BasicsMohammed AliNo ratings yet
- Unit-4 PPT. Embedded Systems by SuryaDocument34 pagesUnit-4 PPT. Embedded Systems by SuryaAnonymous 3yqNzCxtTz100% (1)
- COA Mod3@AzDOCUMENTS - inDocument9 pagesCOA Mod3@AzDOCUMENTS - inINDIAN LEGENDSNo ratings yet
- MPALLecture 2Document21 pagesMPALLecture 2SYED HAMZA ALINo ratings yet
- Essential Electronics & Microcontrollers: FYS3240-4240 Data Acquisition & ControlDocument26 pagesEssential Electronics & Microcontrollers: FYS3240-4240 Data Acquisition & ControljackNo ratings yet
- Lecture 17Document13 pagesLecture 17api-3801184No ratings yet
- Module 4Document15 pagesModule 4prajyotroyalNo ratings yet
- Unit 4Document51 pagesUnit 4Vyshnavi Challa ObullaNo ratings yet
- Module 1 Part 2: Input/Output OrganizationDocument50 pagesModule 1 Part 2: Input/Output Organizations8102003No ratings yet
- Ddco m4 NOTESDocument16 pagesDdco m4 NOTESShankar MNo ratings yet
- Raspberry PiDocument32 pagesRaspberry PiGukeshNo ratings yet
- Lecture Notes 2Document42 pagesLecture Notes 2Prabal RawatNo ratings yet
- Es Unit1Document83 pagesEs Unit1venneti kiranNo ratings yet
- Communication InterfaceDocument45 pagesCommunication Interfaceprabhabathi devi100% (1)
- IO Systems-1Document14 pagesIO Systems-1Syed HamzaNo ratings yet
- Es Unit1Document83 pagesEs Unit1venneti kiranNo ratings yet
- Practical - 1: Aim: - Introduction To 8085 MicroprocessorDocument7 pagesPractical - 1: Aim: - Introduction To 8085 MicroprocessorMandy745No ratings yet
- Interrupts, Exceptions, and System Calls: Chester Rebeiro IIT MadrasDocument67 pagesInterrupts, Exceptions, and System Calls: Chester Rebeiro IIT MadrasprashantvlsiNo ratings yet
- Module 2 IO OrganizationDocument104 pagesModule 2 IO OrganizationrrNo ratings yet
- 8085 Interrupt PDFDocument67 pages8085 Interrupt PDFDeepika Agrawal100% (1)
- Lec 8Document17 pagesLec 8deemo1354210No ratings yet
- Microprocessor and Assembly Language Course Code: 343 ALLDocument18 pagesMicroprocessor and Assembly Language Course Code: 343 ALLGaNo ratings yet
- Computer Organization: Prepared by Asst. Prof. Sherin Thomas ECE Dept. MBITS, NellimattamDocument67 pagesComputer Organization: Prepared by Asst. Prof. Sherin Thomas ECE Dept. MBITS, Nellimattamjinto0007No ratings yet
- 8086 Interrupts and Interrupt Applications: CS 227 Western Washington UniversityDocument25 pages8086 Interrupts and Interrupt Applications: CS 227 Western Washington Universityfrcrce08No ratings yet
- Lecture 4Document34 pagesLecture 4KelvinNo ratings yet
- Microprocessor Based Instrumentation SystemDocument8 pagesMicroprocessor Based Instrumentation SystemMazhar AliNo ratings yet
- IOT UNIT 2 Part 2Document34 pagesIOT UNIT 2 Part 2Hdurjriro3k DirrkrjriNo ratings yet
- Microcontrollers: UNIT-2 Introduction and 8051 Architecture: IntroductionDocument116 pagesMicrocontrollers: UNIT-2 Introduction and 8051 Architecture: IntroductionVivek ThotaNo ratings yet
- Input Output TechniquesDocument65 pagesInput Output Techniquesvivek srivastavNo ratings yet
- Mca Unit1aDocument37 pagesMca Unit1aVivek DubeyNo ratings yet
- 8085 Instruction Addressing Modes ImppDocument87 pages8085 Instruction Addressing Modes ImppRohan VaidyaNo ratings yet
- 34 Input - Output - and - Communication SystemsDocument49 pages34 Input - Output - and - Communication SystemsKARTHIK S SNo ratings yet
- Bharti: AirtelDocument47 pagesBharti: AirtelSunil PillaiNo ratings yet
- Embedded Programming and Robotics: Lesson 11 Arduino InterruptsDocument8 pagesEmbedded Programming and Robotics: Lesson 11 Arduino InterruptsDarwin Vargas100% (1)
- Interrupcions: Processor - I/O Speed MismatchDocument18 pagesInterrupcions: Processor - I/O Speed MismatchRonyVargasNo ratings yet
- Unit - 5Document53 pagesUnit - 5Raj ChauhanNo ratings yet
- CCNA - R&S2 - 02 - Basic - Switching - Concepts - and - Config PDFDocument58 pagesCCNA - R&S2 - 02 - Basic - Switching - Concepts - and - Config PDFdaveNo ratings yet
- Unit-Iv Microcontroller (EC405) AVR Counters, Interrupt, Serial Input/output DataDocument32 pagesUnit-Iv Microcontroller (EC405) AVR Counters, Interrupt, Serial Input/output DataDr-Suraj Kumar SawNo ratings yet
- Microprocessor Architecture: Introduction To Microprocessors Chapter 2Document47 pagesMicroprocessor Architecture: Introduction To Microprocessors Chapter 2Ezhilarasan KaliyamoorthyNo ratings yet
- Pic18 Interrupt 2Document19 pagesPic18 Interrupt 2adamwaiz100% (3)
- 57 Ma NotesDocument21 pages57 Ma NotesKajal GoudNo ratings yet
- Pyq Mu - Electrical Sem6Document10 pagesPyq Mu - Electrical Sem6MOTILAL SUTHAR215291No ratings yet
- Protocoale de Comunicatii: Curs 4Document27 pagesProtocoale de Comunicatii: Curs 4Rares BotezatuNo ratings yet
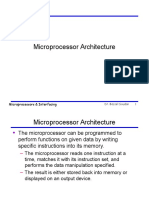
- Microprocessor Architecture: Microprocessors & InterfacingDocument43 pagesMicroprocessor Architecture: Microprocessors & InterfacingSuresh ChinthaNo ratings yet
- Microprocessor Architecture: Microprocessors & InterfacingDocument30 pagesMicroprocessor Architecture: Microprocessors & InterfacingrkpkdNo ratings yet
- 3 MicrocontrollersDocument28 pages3 MicrocontrollersRynefel ElopreNo ratings yet
- Introduction To Embedded Systems Session - ViDocument26 pagesIntroduction To Embedded Systems Session - Vibalajibs203285No ratings yet
- MES MODULE 4 Embedded System ComponentsDocument103 pagesMES MODULE 4 Embedded System Componentsdaniel007workNo ratings yet
- Interrupts: ECE 445 - Computer Organization Dr. Craig Lorie Electrical and Computer Engineering Lecture #16Document38 pagesInterrupts: ECE 445 - Computer Organization Dr. Craig Lorie Electrical and Computer Engineering Lecture #16robNo ratings yet
- Chapter 4 - Interrupts RevisedDocument25 pagesChapter 4 - Interrupts RevisedthandowatersonmpilaNo ratings yet
- By Alexander MaroudisDocument14 pagesBy Alexander MaroudiskingkeyNo ratings yet
- Interrupts - Signals Raised by Hardware External To The MP That Needs A Response (Help) From The MPDocument54 pagesInterrupts - Signals Raised by Hardware External To The MP That Needs A Response (Help) From The MPLakshmi SagarNo ratings yet
- Proportional Pressure Reducing Valve, Pilot-Operated: RE 29282, Edition: 2019-02, Bosch Rexroth AGDocument16 pagesProportional Pressure Reducing Valve, Pilot-Operated: RE 29282, Edition: 2019-02, Bosch Rexroth AGRonald Rayme VenturaNo ratings yet
- Air Duct Module - Air Disinfection, Calculated and EffectiveDocument2 pagesAir Duct Module - Air Disinfection, Calculated and EffectiveHoang TungNo ratings yet
- Colorflex Ez BrochureDocument2 pagesColorflex Ez Brochuredéborah_rosalesNo ratings yet
- Applied Sciences: The Electronic Switch of Windings of A Standard BLDC MotorDocument9 pagesApplied Sciences: The Electronic Switch of Windings of A Standard BLDC Motorapek1No ratings yet
- PSS 1-6H10 A - en - 6500W-IMT65WDocument40 pagesPSS 1-6H10 A - en - 6500W-IMT65WschreyarNo ratings yet
- Operation ManualDocument76 pagesOperation ManualAnas KotbNo ratings yet
- Tamat tm25 High Frequency Earth TesterDocument2 pagesTamat tm25 High Frequency Earth TesterElie kamathe du cielNo ratings yet
- High-Frequency Amplifier Design P ÌoDocument35 pagesHigh-Frequency Amplifier Design P ÌoGanagadhar CHNo ratings yet
- 1 Megabit (128 K X 8-Bit) CMOS EPROM: Distinctive CharacteristicsDocument13 pages1 Megabit (128 K X 8-Bit) CMOS EPROM: Distinctive CharacteristicsRafaelNo ratings yet
- Compacto Modbus Map (1.3.2013) : Default Network ConfigurationDocument10 pagesCompacto Modbus Map (1.3.2013) : Default Network ConfigurationTugui NicolaeNo ratings yet
- Design and Implementation of A 5 kVA InverterDocument22 pagesDesign and Implementation of A 5 kVA InverterscribsunilNo ratings yet
- Euroster 1100ZDocument5 pagesEuroster 1100Znicu secosanNo ratings yet
- Lal Baba Seamless Tubes PVT LTD, Haldia Udaan and Old Plant PLC Details SL No Make Model Part No Product Description Material Code LocationDocument2 pagesLal Baba Seamless Tubes PVT LTD, Haldia Udaan and Old Plant PLC Details SL No Make Model Part No Product Description Material Code LocationLBST ELECTRICALNo ratings yet
- Thesis On Security Alarm SystemDocument7 pagesThesis On Security Alarm Systemaflohiohrvxfwq100% (2)
- RADAR SYSTEMS VR19-unit2Document59 pagesRADAR SYSTEMS VR19-unit2Mummana Mohan ShankarNo ratings yet
- Jaro Eric Quiz in DC CircuitsDocument6 pagesJaro Eric Quiz in DC CircuitstolisNo ratings yet
- AXP340 Installation ManualDocument67 pagesAXP340 Installation ManualMIGUEL FRANCONo ratings yet
- Physics ActivitiesDocument16 pagesPhysics ActivitiesSoumik MahapatroNo ratings yet
- Service Manual: DDX6016BT, DDX6016BTM, DDX6016BTR, DDX773BH, DDX793Document126 pagesService Manual: DDX6016BT, DDX6016BTM, DDX6016BTR, DDX773BH, DDX793Dumur SaileshNo ratings yet
- 2CDS252001R0254 Miniature Circuit Breaker s200 2p C 25 ADocument3 pages2CDS252001R0254 Miniature Circuit Breaker s200 2p C 25 AEdison LeónNo ratings yet
- Declaration of Conformity: (Factories Name and Address)Document1 pageDeclaration of Conformity: (Factories Name and Address)ServandoNo ratings yet
- Thesis On Microstrip Patch Antenna DesignDocument6 pagesThesis On Microstrip Patch Antenna DesignBuyingPaperSterlingHeights100% (2)
- Nüvi 1100/1200/1300/1400 Series: Owner's ManualDocument72 pagesNüvi 1100/1200/1300/1400 Series: Owner's ManualFreddy Humberto RinconNo ratings yet
- DS-K1T201MF/MF-C: IP-Based Fingerprint Access Control TerminalDocument2 pagesDS-K1T201MF/MF-C: IP-Based Fingerprint Access Control Terminalryuma77No ratings yet
- K85005-0135 - VS Series Intelligent Fire Alarm SystemsDocument8 pagesK85005-0135 - VS Series Intelligent Fire Alarm SystemsMfraBoliviaNo ratings yet
- Manual de Instalacion de Alarma Automotriz Aps901cDocument20 pagesManual de Instalacion de Alarma Automotriz Aps901cfrancisco velascoNo ratings yet
- Dorma Porteo Automatic Swing Door Operator PDFDocument8 pagesDorma Porteo Automatic Swing Door Operator PDFNelson SantosNo ratings yet