You might also like
- Design Automation of Cyber-Physical SystemsFrom EverandDesign Automation of Cyber-Physical SystemsMohammad Abdullah Al FaruqueNo ratings yet
- Applied Sciences: Safety-Oriented System Hardware Architecture Exploration in Compliance With ISO 26262Document29 pagesApplied Sciences: Safety-Oriented System Hardware Architecture Exploration in Compliance With ISO 26262Girish KasturiNo ratings yet
- Applsci 12 05456Document31 pagesApplsci 12 05456velos666No ratings yet
- FMEDA-Based Fault Injection and Data Analysis in Compliance With ISO-26262Document5 pagesFMEDA-Based Fault Injection and Data Analysis in Compliance With ISO-26262Sauvik ChakrabortyNo ratings yet
- Matrix Approach To Perform Dependent Failure Analysis in Compliance With Functional Safety StandardsDocument6 pagesMatrix Approach To Perform Dependent Failure Analysis in Compliance With Functional Safety StandardsDuewee87No ratings yet
- Evaluation of Safety Cases in The Domain of Automotive EngineeringDocument5 pagesEvaluation of Safety Cases in The Domain of Automotive EngineeringInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Ljungquist-Thelin2005 Chapter AnIEC62061CompliantSafetySysteDocument15 pagesLjungquist-Thelin2005 Chapter AnIEC62061CompliantSafetySysteNguyễn Thái BảoNo ratings yet
- Safety-Critical Software Development Using Automatic Production Code GenerationDocument13 pagesSafety-Critical Software Development Using Automatic Production Code GenerationganeshNo ratings yet
- Formal Fault Analysis Paperr 11Document8 pagesFormal Fault Analysis Paperr 11Sam HoneyNo ratings yet
- Iso 26262Document6 pagesIso 26262Ghassan Alasmar50% (2)
- ISO26262 - Automotive SafetyDocument9 pagesISO26262 - Automotive SafetyJoseph Kymm100% (5)
- ISO 26262 - Automotive Functional SafetyDocument5 pagesISO 26262 - Automotive Functional SafetyMadhuNo ratings yet
- What Is The ISO 26262 Functional Safety Standard?: Updated Mar 5, 2019Document8 pagesWhat Is The ISO 26262 Functional Safety Standard?: Updated Mar 5, 2019Marziyeh MoosaviNo ratings yet
- NI - What Is The ISO 26262 Functional Safety StandardDocument5 pagesNI - What Is The ISO 26262 Functional Safety StandardkennyaliveNo ratings yet
- 3 ISO26262 AssessmentDocument19 pages3 ISO26262 AssessmentOscar Alfonso Iñigo GéneraNo ratings yet
- SIL Safety Integrity Level: Tools & ReferencesDocument13 pagesSIL Safety Integrity Level: Tools & ReferencesSteve Forster100% (1)
- NHP Whitepaper - The Impacts and Applications of Functional MSSDocument7 pagesNHP Whitepaper - The Impacts and Applications of Functional MSSNiall BegleyNo ratings yet
- Iec 61508Document10 pagesIec 61508mikestone32100% (2)
- A UML Model-Based Approach For Replication Assessment of AUTOSAR Safety-Critical ApplicationsDocument12 pagesA UML Model-Based Approach For Replication Assessment of AUTOSAR Safety-Critical ApplicationsczgNo ratings yet
- Formal Techniques For Optimizing Iso 26262 Fault AnalysisDocument9 pagesFormal Techniques For Optimizing Iso 26262 Fault Analysisshravan fafuNo ratings yet
- UNavailability Assessment of Redundant SISDocument43 pagesUNavailability Assessment of Redundant SISGirish KasturiNo ratings yet
- Safety Analysis of Vehicle SystemsDocument21 pagesSafety Analysis of Vehicle SystemsEricRossoNo ratings yet
- Quantified Fault Tree Techniques For Calculating Hardware Fault Metrics According To ISO 26262Document9 pagesQuantified Fault Tree Techniques For Calculating Hardware Fault Metrics According To ISO 26262Hajar RAZIQNo ratings yet
- EDNI Ebook TM Automotive - 35Document26 pagesEDNI Ebook TM Automotive - 35Roberto AraizaNo ratings yet
- A Process To Facilitate Automated Automotive CyberDocument8 pagesA Process To Facilitate Automated Automotive CyberPriyanka VunnamNo ratings yet
- Automated Security Configuration Checklistfora Cisco IPsec VPNRouterusing SCAPDocument6 pagesAutomated Security Configuration Checklistfora Cisco IPsec VPNRouterusing SCAPKhadija Khadija AouadiNo ratings yet
- Certs Isa FinalDocument72 pagesCerts Isa FinalfpttmmNo ratings yet
- Investigation On Safety Related StandardDocument6 pagesInvestigation On Safety Related StandardCh Mansoor Anwar AttariNo ratings yet
- En 50128 Compliance WPDocument14 pagesEn 50128 Compliance WPGoyal SanjaiNo ratings yet
- Automatic Fault Tree Generation From SysML System ModelsDocument7 pagesAutomatic Fault Tree Generation From SysML System ModelssabemaniacNo ratings yet
- A Security Evaluation of IEC - 62351Document10 pagesA Security Evaluation of IEC - 62351edsonpaveli-1No ratings yet
- Functional Safety in Automotive Electronics: Zhang Xinbo, Luo FengDocument8 pagesFunctional Safety in Automotive Electronics: Zhang Xinbo, Luo FengVinoth kumarNo ratings yet
- Iec 61511 PDFDocument4 pagesIec 61511 PDFScribdSnake1230% (1)
- A Model-Based Design Approach For Automotive Crash Safety SystemsDocument7 pagesA Model-Based Design Approach For Automotive Crash Safety SystemsBalajee AsokanNo ratings yet
- A Case Study of Safety Integrity Level AssessmentDocument13 pagesA Case Study of Safety Integrity Level AssessmentYounesYounesYounesNo ratings yet
- Safety Instrumented Systems: Can They Be Integrated But Separate?Document5 pagesSafety Instrumented Systems: Can They Be Integrated But Separate?PatrisonNo ratings yet
- A Primer On Sis Understanding Process Safety Systems Design DataDocument2 pagesA Primer On Sis Understanding Process Safety Systems Design DataAkoKhaledi100% (1)
- Reliability Analysis of Digital Systems in A Probabilistic Risk Analysis For Nuclear Power PlantsDocument12 pagesReliability Analysis of Digital Systems in A Probabilistic Risk Analysis For Nuclear Power Plantsdo3llahNo ratings yet
- ISO 26262 Automotive Functional Safety: Issues and ChallengesDocument13 pagesISO 26262 Automotive Functional Safety: Issues and Challengeslakshmanan.govindan7449No ratings yet
- The Idea of An Integration Interface For Model-Based Software Development's Processor-in-the-Loop (PiL) SimulationDocument13 pagesThe Idea of An Integration Interface For Model-Based Software Development's Processor-in-the-Loop (PiL) SimulationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 1804 04349Document9 pages1804 04349pppopNo ratings yet
- (Standard) J3061 Automotive Secuirty RequirementDocument15 pages(Standard) J3061 Automotive Secuirty RequirementLeslieNo ratings yet
- Knowledge and Skills Requirements For The SoftwareDocument8 pagesKnowledge and Skills Requirements For The SoftwareHiếu ĐàmNo ratings yet
- Ewili14 Submission 19Document7 pagesEwili14 Submission 19luongktdtNo ratings yet
- Functional SafetyDocument8 pagesFunctional SafetyMiceasnagovNo ratings yet
- Presentation On Standard ISO 26262Document181 pagesPresentation On Standard ISO 26262marris09100% (2)
- Integral Simulation Toolset For Design and Evaluation of ADA SystemsDocument5 pagesIntegral Simulation Toolset For Design and Evaluation of ADA SystemstrisinoNo ratings yet
- SilDocument16 pagesSilRail_RajuNo ratings yet
- Functional Safety White Paper 051020Document27 pagesFunctional Safety White Paper 051020selvaNo ratings yet
- Risk Management / Functional Safety: A Practical Approach For End Users and System IntegratorsDocument8 pagesRisk Management / Functional Safety: A Practical Approach For End Users and System IntegratorsAhmed GuevaraNo ratings yet
- Kushal2017 RLDocument11 pagesKushal2017 RLchaima bensNo ratings yet
- Functional Safety of Safety Instrumented SystemsDocument2 pagesFunctional Safety of Safety Instrumented SystemsSteve Forster100% (1)
- Sis 103Document8 pagesSis 103mykillerdroneNo ratings yet
- Requirements of ISO 26262Document3 pagesRequirements of ISO 26262IQPC GmbH100% (2)
- Timing Protection in AUTOSAR ISO 26262Document10 pagesTiming Protection in AUTOSAR ISO 26262Joseph KymmNo ratings yet
- Sabp Z 076Document29 pagesSabp Z 076Hassan Mokhtar100% (1)
- Towards A Security Driven Automotive Development LifecycleDocument22 pagesTowards A Security Driven Automotive Development LifecycleRaviNo ratings yet
- SAFA Presentation-IEC61511 Overview-A KneiselDocument40 pagesSAFA Presentation-IEC61511 Overview-A KneiselRiksa Wisudya Achmadsyah SugandaNo ratings yet
- Rapid Prototyping Software for Avionics Systems: Model-oriented Approaches for Complex Systems CertificationFrom EverandRapid Prototyping Software for Avionics Systems: Model-oriented Approaches for Complex Systems CertificationNo ratings yet
- Safety First For Automated DrivingDocument157 pagesSafety First For Automated Drivingmashablescribd100% (1)
- Floor Marking GuideDocument14 pagesFloor Marking Guideamitrpl100% (1)
- Yellow and Black Fun Doodles and Blobs Employee Profile About Me Creative Presentation SlidesCarnivalDocument7 pagesYellow and Black Fun Doodles and Blobs Employee Profile About Me Creative Presentation SlidesCarnivalGaurang PatniNo ratings yet
- Review and Analysis of The Importance of Autonomous Vehicles Liability: A Systematic Literature ReviewDocument23 pagesReview and Analysis of The Importance of Autonomous Vehicles Liability: A Systematic Literature ReviewGaurang PatniNo ratings yet
- Union Metal SemiconductorDocument4 pagesUnion Metal SemiconductorskinhugoNo ratings yet
- Budget of Work Inquiries Investigations and Immersion 19 20Document1 pageBudget of Work Inquiries Investigations and Immersion 19 20alma florNo ratings yet
- Examiners' Report Principal Examiner Feedback January 2018Document7 pagesExaminers' Report Principal Examiner Feedback January 2018WandaNo ratings yet
- Chapter 01 Fundamental and Derived QuantitiesDocument7 pagesChapter 01 Fundamental and Derived QuantitiesAlicia WilliamsNo ratings yet
- Term Test Pointers For Review - 1st TermDocument2 pagesTerm Test Pointers For Review - 1st Termjessica holgadoNo ratings yet
- NIELIT Recruitment For Scientist and Technical Assistants 2017 Official NotificationDocument6 pagesNIELIT Recruitment For Scientist and Technical Assistants 2017 Official NotificationKshitija100% (1)
- PienaDocument1 pagePienaMika Flores PedroNo ratings yet
- EED516-Assignment 1 - S1 2023Document2 pagesEED516-Assignment 1 - S1 2023RETRO GAMERSNo ratings yet
- PCBDocument5 pagesPCBarampandey100% (4)
- Module 6 - Using and Evaluating Instructional MaterialsDocument5 pagesModule 6 - Using and Evaluating Instructional MaterialsMaria Victoria Padro100% (4)
- Cable Systems For High and Extra-High Voltage: Development, Manufacture, Testing, Installation and Operation of Cables and Their AccessoriesDocument1 pageCable Systems For High and Extra-High Voltage: Development, Manufacture, Testing, Installation and Operation of Cables and Their AccessorieseddisonfhNo ratings yet
- Rivers and Their Origin (Top MCQ)Document24 pagesRivers and Their Origin (Top MCQ)Anil Yadav100% (1)
- Dimensions and Methodology of Business Studies Dec 2018Document2 pagesDimensions and Methodology of Business Studies Dec 2018Nallavenaaya Unni100% (1)
- Full TextDocument167 pagesFull Textjon minanNo ratings yet
- Introduction To Neutrino Physics: Paolo LipariDocument85 pagesIntroduction To Neutrino Physics: Paolo LipariSubhankar HowladerNo ratings yet
- Power Distribution & Utilization: Total Power Generation of Last 10 Years and Forecast of 20 YearsDocument12 pagesPower Distribution & Utilization: Total Power Generation of Last 10 Years and Forecast of 20 YearsSYED ALIYYAN IMRAN ALINo ratings yet
- Re 150821Document2 pagesRe 150821francis puthuserilNo ratings yet
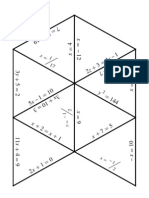
- Algebra1 Review PuzzleDocument3 pagesAlgebra1 Review PuzzleNicholas Yates100% (1)
- Parkinson S Disease Detection Based On SDocument5 pagesParkinson S Disease Detection Based On SdaytdeenNo ratings yet
- Evs ManualDocument24 pagesEvs ManualJoseph TuckerNo ratings yet
- Communicative English Lab Manual 1643268175Document24 pagesCommunicative English Lab Manual 1643268175Dimple BhatiNo ratings yet
- Systematic Literature Review SvenskaDocument6 pagesSystematic Literature Review Svenskafihum1hadej2100% (1)
- The Extension Delivery SystemDocument10 pagesThe Extension Delivery SystemApril Jay Abacial IINo ratings yet
- Relations Between Lean Management and Organizational StructuresDocument12 pagesRelations Between Lean Management and Organizational StructuresRENE JAVIER PACHECO SALASNo ratings yet
- Samsung Galaxy Watch 5 Pro User ManualDocument131 pagesSamsung Galaxy Watch 5 Pro User Manualzyron100% (1)
- Ultimate Electronics - Book - CircuitLabDocument3 pagesUltimate Electronics - Book - CircuitLabEldon50% (2)
- DCS Ground Charts v350Document34 pagesDCS Ground Charts v350lkjsdflkjNo ratings yet
- NeedScope On TechnologyDocument22 pagesNeedScope On TechnologyNguyen Ngo Dinh PhuongNo ratings yet
- Evolution of Media INDUSTRIAL ERADocument16 pagesEvolution of Media INDUSTRIAL ERAAlec Ruht MasulaNo ratings yet