You might also like
- ECU Pinouts+BDM Connections+IMMO INFO ListDocument44 pagesECU Pinouts+BDM Connections+IMMO INFO ListObd Bytes50% (6)
- Excavator Audit Training MaterialDocument53 pagesExcavator Audit Training MaterialLukis setiyoNo ratings yet
- Assemble Diff 777DDocument17 pagesAssemble Diff 777DCavandraNo ratings yet
- Service Manual: Publication NoDocument23 pagesService Manual: Publication NoCharlon ButtigiegNo ratings yet
- Equipment CostsDocument30 pagesEquipment CostsRahul PrajapatNo ratings yet
- 8 Series Small Mobile Diesel Air CompressorsDocument8 pages8 Series Small Mobile Diesel Air CompressorsGuptaNo ratings yet
- Time Sheet THN 2022 - AprilDocument32 pagesTime Sheet THN 2022 - AprilKRIS YISSNo ratings yet
- 395 - ExcavatorDocument12 pages395 - ExcavatorhendrynNo ratings yet
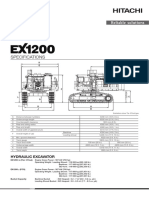
- EX1200-7 Specs Digital-Only 18-11 PDFDocument20 pagesEX1200-7 Specs Digital-Only 18-11 PDFvitaliyNo ratings yet
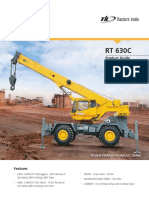
- Product Guide: Rough Terrain Hydraulic CraneDocument8 pagesProduct Guide: Rough Terrain Hydraulic CraneHardeep SinghNo ratings yet
- 1.CMVR Test ProceduresDocument1 page1.CMVR Test ProceduresanandganesNo ratings yet
- Classification of VehiclesDocument35 pagesClassification of Vehiclesdranita@yahoo.com0% (1)
- GD511A 1PdfDocument32 pagesGD511A 1PdfDanar PrasastyoNo ratings yet
- Safety & Maintenance Checklist Underground LoadersDocument1 pageSafety & Maintenance Checklist Underground LoadersGustavoNo ratings yet
- Economy: Calculation Using Specific Fuel ConsumptionDocument5 pagesEconomy: Calculation Using Specific Fuel ConsumptionOakkarNo ratings yet
- Hitachi ZX330 Hydraulic ExcavatorDocument2 pagesHitachi ZX330 Hydraulic ExcavatorFirstianto MnNo ratings yet
- 05 HD785-7 Engine 12V140-2 Presentation Part1Document9 pages05 HD785-7 Engine 12V140-2 Presentation Part1Satria Fajri100% (1)
- Boali CPCD30Document96 pagesBoali CPCD30Sittca MantenimientoNo ratings yet
- Excavator Filters Price List - SMRIDHIDocument8 pagesExcavator Filters Price List - SMRIDHISurajPandey100% (1)
- RMA T6 ROPS Physical Test BinderDocument26 pagesRMA T6 ROPS Physical Test BinderPeter GarbielNo ratings yet
- DGMS Testing ProceduresDocument59 pagesDGMS Testing ProceduresVikram SinghNo ratings yet
- Assembly Manual R9350Document92 pagesAssembly Manual R9350Andres Hernandez100% (2)
- LH 110 Port: Material Handling MachineDocument20 pagesLH 110 Port: Material Handling Machinerobson2015No ratings yet
- Pirtek Section G Hydraulic AccessoriesDocument119 pagesPirtek Section G Hydraulic AccessoriespIRTEKNo ratings yet
- SEKN5047 - Introduction of Ultrasonic Measurement ToolDocument3 pagesSEKN5047 - Introduction of Ultrasonic Measurement ToolMrAlbert2009No ratings yet
- 345 GC Hydraulic Excavator - Technical Specifications (Electronic Only) (LAXB) AEXQ2380Document13 pages345 GC Hydraulic Excavator - Technical Specifications (Electronic Only) (LAXB) AEXQ2380souleymane aboudramane SOOBANo ratings yet
- Komatsu HD 785Document7 pagesKomatsu HD 785Salim BazzryNo ratings yet
- Em 0307530001Document7 pagesEm 0307530001SIDI ahmedou yahya100% (1)
- GMT-Brochure Katalog Product PDFDocument32 pagesGMT-Brochure Katalog Product PDFEri MalindoNo ratings yet
- Insulated Panels Installation ManualDocument84 pagesInsulated Panels Installation ManualVeralynn LapeNo ratings yet
- Pm-Clinic Service: HD325-6 #5485 6000 HD325-6W #5485 6000 HD405-6 #1001 2000Document2 pagesPm-Clinic Service: HD325-6 #5485 6000 HD325-6W #5485 6000 HD405-6 #1001 2000Naughty VongNo ratings yet
- C10836843 PDFDocument1 pageC10836843 PDFsandrobhaNo ratings yet
- MST PDFDocument12 pagesMST PDFMeleștean MihaiNo ratings yet
- Crosby G-450 Wire Rope Clips SpecsDocument2 pagesCrosby G-450 Wire Rope Clips SpecsUlises CastroNo ratings yet
- Field Assembly ManualDocument40 pagesField Assembly Manualmikhail.glotovNo ratings yet
- JLG AJ Articulating Boom LiftDocument6 pagesJLG AJ Articulating Boom LiftForklift Systems IncorporatedNo ratings yet
- 474-5-BS en 2006+a2-2012Document34 pages474-5-BS en 2006+a2-2012Fabio ManenteNo ratings yet
- 120B POWER TRAIN CaterpillarDocument6 pages120B POWER TRAIN CaterpillarkeifferNo ratings yet
- Electric Reach Truck: ETM/ETV 318-325Document6 pagesElectric Reach Truck: ETM/ETV 318-325陳品宏100% (1)
- Is Iso 20474 4 2008Document21 pagesIs Iso 20474 4 2008alamimohamedNo ratings yet
- WWE Filter Press OperationDocument20 pagesWWE Filter Press OperationMf LuiNo ratings yet
- Motor Grader: BSIII CEV Compliance Engine High Productivity Easy Operation Operator ComfortDocument4 pagesMotor Grader: BSIII CEV Compliance Engine High Productivity Easy Operation Operator ComfortKIIYA DAJEMBENo ratings yet
- SAFITY Features in HEMMDocument2 pagesSAFITY Features in HEMMAshok Rao MiriyalaNo ratings yet
- HM400-3R Leaflet Cen00510-01 - 86997 PDFDocument9 pagesHM400-3R Leaflet Cen00510-01 - 86997 PDFKevin Andrian0% (1)
- MARUMA UndercarriageDocument4 pagesMARUMA UndercarriageaafloreshNo ratings yet
- Hw300 AssembleDocument111 pagesHw300 AssembleAndreiNo ratings yet
- Hydraulic Excavator PresentationDocument14 pagesHydraulic Excavator Presentationapi-535497404No ratings yet
- Biodata 1Document8 pagesBiodata 1Jake Pajonillan TagnepisNo ratings yet
- PC 1250 500 HR Service SheetDocument5 pagesPC 1250 500 HR Service SheetJamyansuren TseveendorjNo ratings yet
- Mine Canadian Royalties: Excavator TrainingDocument72 pagesMine Canadian Royalties: Excavator Trainingotak04No ratings yet
- XCMG XC938 Wheel Loader Operation and Maintenance ManualDocument291 pagesXCMG XC938 Wheel Loader Operation and Maintenance ManualSyeed Asif AliNo ratings yet
- 9336 - 0 Ingstrom E-BrochureDocument4 pages9336 - 0 Ingstrom E-BrochureForum PompieriiNo ratings yet
- Sandvik Model DC 122 RDocument13 pagesSandvik Model DC 122 RPedro100% (1)
- TSR KuDocument16 pagesTSR KuAngsaNo ratings yet
- Failure Analysis Report EX1296 - Final Drive LH NoiseDocument11 pagesFailure Analysis Report EX1296 - Final Drive LH Noiseputri lestariNo ratings yet
- Airroc T25 / D40 (Roc 203) : Atlas Copco Surface Drill RigsDocument2 pagesAirroc T25 / D40 (Roc 203) : Atlas Copco Surface Drill RigsjhanetNo ratings yet
- 06 Undercarriage Tools PDFDocument108 pages06 Undercarriage Tools PDFMarco BacianNo ratings yet
- PC1250Document106 pagesPC1250yonathan yonathan100% (1)
- Concrete Truck Plant Pre-Acceptance ChecklistDocument2 pagesConcrete Truck Plant Pre-Acceptance ChecklistHerey VixionersNo ratings yet
- 0 - Brocure - SY215 ACE English Version PDFDocument2 pages0 - Brocure - SY215 ACE English Version PDFLutfi DstrNo ratings yet
- Cat Hydo 10wDocument4 pagesCat Hydo 10wWilbort Encomenderos RuizNo ratings yet
- Crawler Crane-Hitachi Sumitomo SCX550E 55t SpecificationsDocument28 pagesCrawler Crane-Hitachi Sumitomo SCX550E 55t SpecificationsAnonymous hRWwL7pZnCNo ratings yet
- Manitou Tyre Handlers enDocument4 pagesManitou Tyre Handlers enRui FerreiraNo ratings yet
- Wa500 6RDocument20 pagesWa500 6RYulius PurnamaNo ratings yet
- LIEBHERR R966 980B EN PreviewDocument51 pagesLIEBHERR R966 980B EN PreviewFernando AlmeidaNo ratings yet
- r994b GB Us TB ArcticDocument12 pagesr994b GB Us TB Arcticwalk01No ratings yet
- HEMM-Wheel Loader01Document13 pagesHEMM-Wheel Loader01miningnova2100% (1)
- araña3CR285DME Eng MANUAL-DE-OPERACIONDocument20 pagesaraña3CR285DME Eng MANUAL-DE-OPERACIONtincho_0026No ratings yet
- Trouble Shooting Case Study (Hydraulics)Document14 pagesTrouble Shooting Case Study (Hydraulics)Riahi Rezeg0% (1)
- Is Iso 10265 2008Document18 pagesIs Iso 10265 2008Fabio ManenteNo ratings yet
- Is Iso 20474 3 2008 PDFDocument17 pagesIs Iso 20474 3 2008 PDFsubhochandraNo ratings yet
- En 16252-2012Document42 pagesEn 16252-2012Fabio Manente100% (1)
- ISO 10-04 ControlliDocument18 pagesISO 10-04 ControlliFabio ManenteNo ratings yet
- Sae j2012 2002Document62 pagesSae j2012 2002Fabio ManenteNo ratings yet
- PAI Mack & Volvo Applications 2018: Catalog Data SheetDocument2 pagesPAI Mack & Volvo Applications 2018: Catalog Data SheetGustavo MosqueraNo ratings yet
- Steer by Wire AbstractDocument3 pagesSteer by Wire AbstractMectrosoft Creative technologyNo ratings yet
- Competitive Bulletin: Cat 950H / 962H vs. Volvo L110E / L120E Stage IIIA CompliantDocument25 pagesCompetitive Bulletin: Cat 950H / 962H vs. Volvo L110E / L120E Stage IIIA CompliantDAnielNo ratings yet
- Seminar Report CharanDocument17 pagesSeminar Report CharanAbhishek MukherjeeNo ratings yet
- RAB Hbs Pakai UNTUK MOBILDocument43 pagesRAB Hbs Pakai UNTUK MOBILhabibie irshanNo ratings yet
- 2012-2016 Amarok ABS 5Document1 page2012-2016 Amarok ABS 5JavierNo ratings yet
- BS Au 050-1.5.1-1994 (1999) PDFDocument28 pagesBS Au 050-1.5.1-1994 (1999) PDFamerNo ratings yet
- C6 Pavement Design - 6pDocument8 pagesC6 Pavement Design - 6pJeffNo ratings yet
- Hub Seal Reference Chart: FootnotesDocument2 pagesHub Seal Reference Chart: FootnotesLuis OvandoNo ratings yet
- Motro 22Document33 pagesMotro 22Jose cuelloNo ratings yet
- Product Datasheet ASSA ABLOY DL6120STADocument24 pagesProduct Datasheet ASSA ABLOY DL6120STAMarly Salas GonzalezNo ratings yet
- Dl250a enDocument9 pagesDl250a enBhagoo HatheyNo ratings yet
- Bobcat s160 SpecsDocument2 pagesBobcat s160 SpecsAlfonso CervantesNo ratings yet
- Company Profile GazelleDocument4 pagesCompany Profile GazelleDennis Raymond AlagarNo ratings yet
- Plastic Road ReportDocument6 pagesPlastic Road ReportsrivinaymnNo ratings yet
- Bseries 1997Document1,418 pagesBseries 1997Karl CordialNo ratings yet
- Foton Gasoline Type Mobile Food Truck PI-20231122Document3 pagesFoton Gasoline Type Mobile Food Truck PI-20231122Moh AchourNo ratings yet
- 09 Renault Kerax Organisation s1Document5 pages09 Renault Kerax Organisation s1Lorenzo Martinez ValenzuelaNo ratings yet
- Car Sales Kaggle DV0130EN Lab2 StartDocument40 pagesCar Sales Kaggle DV0130EN Lab2 StartMohamed AhmedNo ratings yet
- Operator Manual ECB3035Document114 pagesOperator Manual ECB3035ErnNo ratings yet