You might also like
- Ec3353 Electronic Devices and Circuits 1807873807 Ec3353 Electronic Devices and Circuits Lecture Notes 1Document216 pagesEc3353 Electronic Devices and Circuits 1807873807 Ec3353 Electronic Devices and Circuits Lecture Notes 1sukhmancheema86No ratings yet
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Hydrostatic and Electric DriveDocument25 pagesHydrostatic and Electric DriveJennsonFernandez50% (2)
- Transmission SystemDocument61 pagesTransmission SystemaravindNo ratings yet
- Atomic Structure & The Periodic TableDocument56 pagesAtomic Structure & The Periodic TableAnas DarwishNo ratings yet
- Electric Car: GE109 Lab ReportDocument15 pagesElectric Car: GE109 Lab ReportSujal BansalNo ratings yet
- Lecture 1 Introduction To Traction SystemsDocument12 pagesLecture 1 Introduction To Traction SystemsMaalmalan KeekiyyaaNo ratings yet
- New Generation and Hybrid Vehicle NotesDocument93 pagesNew Generation and Hybrid Vehicle NotespavanraneNo ratings yet
- BEE PBL - Electric VehiclesDocument15 pagesBEE PBL - Electric VehiclesA240 MANALI SAKURKARNo ratings yet
- Climate Change and Its Impact On PakistanDocument15 pagesClimate Change and Its Impact On PakistanNauman Rashid96% (24)
- ZEO Brochure Final 3 16Document5 pagesZEO Brochure Final 3 16Santiago Cabarcas L. de UrquizoNo ratings yet
- Hybrid Electrical VehiclesDocument12 pagesHybrid Electrical Vehiclesinsta gramNo ratings yet
- Introduction:-: Regenerative ("Regent") Brakes, Which Are Widely Used in ElectricDocument20 pagesIntroduction:-: Regenerative ("Regent") Brakes, Which Are Widely Used in ElectricSonu GauravNo ratings yet
- Differential in Electrical VehicleDocument10 pagesDifferential in Electrical VehiclemazlumNo ratings yet
- Wheel Torque and Speed in A Vehicle With In-Wheel MotorsDocument5 pagesWheel Torque and Speed in A Vehicle With In-Wheel Motorssuf5578No ratings yet
- EV NotesDocument16 pagesEV Notesgaddala kaladharNo ratings yet
- Initial Report Anti Reverse DiffDocument53 pagesInitial Report Anti Reverse Diffvinay muleyNo ratings yet
- Johnson 1985Document10 pagesJohnson 1985José ArrascaitaNo ratings yet
- 472design and Simulation of Four Wheel Steering System For LMV PDFDocument4 pages472design and Simulation of Four Wheel Steering System For LMV PDFAfzal dawood100% (1)
- 321Document2 pages321zabalajerome09No ratings yet
- Modeling and Simulation of Electric Vehicle To Optimize Its Cost and RangeDocument5 pagesModeling and Simulation of Electric Vehicle To Optimize Its Cost and Rangevivashwanth paiNo ratings yet
- Mod-5 22 Eme13Document22 pagesMod-5 22 Eme13SHARATH RNo ratings yet
- Evt U1&2 BqeDocument20 pagesEvt U1&2 BqeshivaranjaniesNo ratings yet
- Mod-5 22 Eme13Document20 pagesMod-5 22 Eme13SHARATH RNo ratings yet
- Four-Wheel Steering Mechanism - ReviewDocument4 pagesFour-Wheel Steering Mechanism - ReviewRajatNo ratings yet
- Irjet V5i5622Document6 pagesIrjet V5i5622TrươngVănMếnNo ratings yet
- Introduction To The AutomobileDocument9 pagesIntroduction To The AutomobileShivamDivyamNo ratings yet
- NGHV - Reference Course MaterialDocument51 pagesNGHV - Reference Course MaterialSuriya Prakash.DNo ratings yet
- 6th Semestermechanical Automobile Engineering Lab ManualDocument21 pages6th Semestermechanical Automobile Engineering Lab ManualSayan BiswasNo ratings yet
- Steering Stability Control For Four-Motor Distributed Drive High-Speed Tracked VehiclesDocument16 pagesSteering Stability Control For Four-Motor Distributed Drive High-Speed Tracked VehiclesDRISHYANo ratings yet
- Analysis of The Electric Wheel VibrationDocument9 pagesAnalysis of The Electric Wheel VibrationSantiago Puma Puma AraujoNo ratings yet
- DRIVES NotesDocument44 pagesDRIVES NotesChase GarciaNo ratings yet
- Kinetic Energy Recovery SystemDocument33 pagesKinetic Energy Recovery SystemNaveenNo ratings yet
- Automotive EngineeringDocument62 pagesAutomotive EngineeringMD JuniorNo ratings yet
- Sandeep Majour Project ReportDocument74 pagesSandeep Majour Project ReportNaresh DamaNo ratings yet
- Powertrain and DrivelineDocument6 pagesPowertrain and DrivelineRaneem khaledNo ratings yet
- Different Sub-Systems of Automobile: NA M E - Dittam Saha - 1 3 0 0 0 7 2 0 0 7 6Document11 pagesDifferent Sub-Systems of Automobile: NA M E - Dittam Saha - 1 3 0 0 0 7 2 0 0 7 6Dittam SahaNo ratings yet
- Experimental Setup of Steering Controlled Headlight MechanismDocument5 pagesExperimental Setup of Steering Controlled Headlight Mechanismnadeemq_0786100% (1)
- Road Power GenerationDocument28 pagesRoad Power GenerationBharath v100% (2)
- Kinetic Energy Recovery System - BriefDocument32 pagesKinetic Energy Recovery System - BriefNaveenNo ratings yet
- Regenerative Braking Systems RBS FutureDocument4 pagesRegenerative Braking Systems RBS Futuresmabhibidkar2001No ratings yet
- Electric Transaxle White PaperDocument6 pagesElectric Transaxle White PaperTechnipower Systems100% (1)
- Characteristics of Electric Drives: Subject Name: Electric Drives Class: 4 Year/ VII SemesterDocument35 pagesCharacteristics of Electric Drives: Subject Name: Electric Drives Class: 4 Year/ VII SemesterBabbu DograNo ratings yet
- At121 Lesson 1Document8 pagesAt121 Lesson 1Dee DemNo ratings yet
- T11 4WD Service Manual PDFDocument40 pagesT11 4WD Service Manual PDFAxlesNo ratings yet
- Steering Controlled Headlight MechanismDocument3 pagesSteering Controlled Headlight Mechanismajinkyawj01No ratings yet
- Reserch Pepar of Free Energy Bike 1Document4 pagesReserch Pepar of Free Energy Bike 1Jogendra GhodkeNo ratings yet
- Epicyclic Gear TrainDocument2 pagesEpicyclic Gear TrainManish BholeNo ratings yet
- 1.electrical Drive SystemDocument6 pages1.electrical Drive SystemJeetender MishraNo ratings yet
- Uee Unit 1Document85 pagesUee Unit 1nithish reddyNo ratings yet
- Mechanics 2: IndexDocument4 pagesMechanics 2: IndexescriboalprofeNo ratings yet
- Electromagnetic Braking System: 1.backgroundDocument2 pagesElectromagnetic Braking System: 1.backgroundZiyad BhatalaNo ratings yet
- Ev HubDocument11 pagesEv HubrsselfdrivecarsNo ratings yet
- Brush-Less DC Motor Drive For Steer-By-Wire Electric Power Steering ApplicationsDocument8 pagesBrush-Less DC Motor Drive For Steer-By-Wire Electric Power Steering ApplicationsJessi MarieNo ratings yet
- ELEC 6471 Hybrid Electric Vehicles and Design Assignment: 1 Priyesh Arvindbhai Bhalala Student ID: 40217267Document3 pagesELEC 6471 Hybrid Electric Vehicles and Design Assignment: 1 Priyesh Arvindbhai Bhalala Student ID: 40217267Priyesh BhalalaNo ratings yet
- Lecture Notes On Automatic Transmission System e DDocument74 pagesLecture Notes On Automatic Transmission System e Dboafoenoch2020No ratings yet
- 242Document4 pages242Fahri RamdaniNo ratings yet
- AssignmentDocument9 pagesAssignmentgursahib singhNo ratings yet
- Automobile Engineering Unit - IDocument17 pagesAutomobile Engineering Unit - IChandrashekhara K LNo ratings yet
- Main Components of A CarDocument17 pagesMain Components of A CarSujan BanikNo ratings yet
- Materials Today: Proceedings: R. Kishore, P. Gurusamy, S. Nagendharan, P. SubashDocument4 pagesMaterials Today: Proceedings: R. Kishore, P. Gurusamy, S. Nagendharan, P. SubashKishore RaviNo ratings yet
- Braking System-Wps OfficeDocument7 pagesBraking System-Wps OfficerkNo ratings yet
- Ijcrt22a6502 Rack PinonDocument9 pagesIjcrt22a6502 Rack PinonenkusilasorsaNo ratings yet
- AbstractDocument10 pagesAbstractMUSKAN PRNNo ratings yet
- Ashghal Approved Asphalt Mixes and Plants-50Document14 pagesAshghal Approved Asphalt Mixes and Plants-50Utpal MondalNo ratings yet
- INT MT 58 CatalogDocument27 pagesINT MT 58 CatalogSilvio Alfredo Vindell CruzNo ratings yet
- Technical English For Automotive Engineering - Chapter 2 - The ENGINEDocument7 pagesTechnical English For Automotive Engineering - Chapter 2 - The ENGINEDũng NguyễnNo ratings yet
- Anurag Group of Institutions: A Technical Seminar On Hydrofoil-The Water CycleDocument13 pagesAnurag Group of Institutions: A Technical Seminar On Hydrofoil-The Water CycleRavi ShankerNo ratings yet
- Ciclo BraytonDocument8 pagesCiclo BraytonFabian BarajasNo ratings yet
- SCC FLEXmax 80 Data SheetDocument2 pagesSCC FLEXmax 80 Data SheetAlayn1807No ratings yet
- Nextracker White Paper Mitigating Extreme Weather Risk Part 2Document14 pagesNextracker White Paper Mitigating Extreme Weather Risk Part 2Tiago CunhaNo ratings yet
- Analisis de Gas de Aceite de Transformador Utilizando Una Columna de Separacion Astm d3612 KasalabDocument2 pagesAnalisis de Gas de Aceite de Transformador Utilizando Una Columna de Separacion Astm d3612 KasalabJohnatan HernándezNo ratings yet
- Aritco Home Lift Access Data SheetDocument2 pagesAritco Home Lift Access Data SheetNancy StarryNo ratings yet
- PTW List AdministrationDocument123 pagesPTW List AdministrationPPS MangunrejaNo ratings yet
- Pre-Piped Vertical Bladder TanksDocument6 pagesPre-Piped Vertical Bladder TanksGabrielaNo ratings yet
- Catalogue ENLF TYDDocument2 pagesCatalogue ENLF TYDThảo TrầnNo ratings yet
- 01-Steam Power Plant 26 OctDocument64 pages01-Steam Power Plant 26 OcthuusenaliNo ratings yet
- Heat Flux SensorsDocument4 pagesHeat Flux SensorsAry SetiawanNo ratings yet
- Yi Jin JingDocument4 pagesYi Jin JingFlower FairyNo ratings yet
- Ecm Nissan Versa 2014 5Document1 pageEcm Nissan Versa 2014 5Ghianny AndresNo ratings yet
- Data Center Cooling Technologies and Best Practices - Digital RealtyDocument4 pagesData Center Cooling Technologies and Best Practices - Digital RealtySergio GarciaNo ratings yet
- UntitledDocument3 pagesUntitledEmily RostomyanNo ratings yet
- Water Cooling System Quiz: During Underway and When Ship Is Far Away From The SeabedDocument11 pagesWater Cooling System Quiz: During Underway and When Ship Is Far Away From The SeabedJohn Noel BasNo ratings yet
- c137353 Revc Spec Sheet Maintenance Kits 30jul2018Document2 pagesc137353 Revc Spec Sheet Maintenance Kits 30jul2018Andrés Marcelo Carrasco CisternasNo ratings yet
- Indonesian Coal Index Report: Argus/CoalindoDocument2 pagesIndonesian Coal Index Report: Argus/CoalindoRahmat Dian Syah PutraNo ratings yet
- Surficial Uranium DepositsDocument236 pagesSurficial Uranium DepositsLorilleuxNo ratings yet
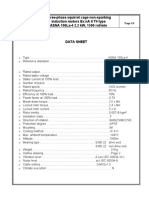
- Umeb-S.A Three-Phase Squirrel Cage Non-Sparking Induction Motors Ex Na II T4 Type ASNA 100la-4 2.2 KW, 1500 Rot/minDocument4 pagesUmeb-S.A Three-Phase Squirrel Cage Non-Sparking Induction Motors Ex Na II T4 Type ASNA 100la-4 2.2 KW, 1500 Rot/minCARMEN DIMITRIUNo ratings yet
- KSJ 10th Eng - Answer Key - Rev Test I - Model Question Paper 1 - Feb 22Document5 pagesKSJ 10th Eng - Answer Key - Rev Test I - Model Question Paper 1 - Feb 22Matheswaran MassNo ratings yet
- Climbing Film Evaporator: I. CHE 1014 II. SB92Document14 pagesClimbing Film Evaporator: I. CHE 1014 II. SB92Khalid M MohammedNo ratings yet
- How Do You Calculate The Transformer Turns Ratio and The Current Taken From The Supply When An Ideal Transformer Connected To A 240 V MainsDocument15 pagesHow Do You Calculate The Transformer Turns Ratio and The Current Taken From The Supply When An Ideal Transformer Connected To A 240 V MainsTurn LewyNo ratings yet