You might also like
- Introduction to Hybrid Vehicle System Modeling and ControlFrom EverandIntroduction to Hybrid Vehicle System Modeling and ControlRating: 4 out of 5 stars4/5 (1)
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Electricvehiclerunbybldcmotor PDFDocument57 pagesElectricvehiclerunbybldcmotor PDFSanthoshNo ratings yet
- Chapter Electric VehicleDocument51 pagesChapter Electric VehicleAmit goyalNo ratings yet
- 111 Study NCDocument8 pages111 Study NCARUN VNo ratings yet
- Development of Small Battery Powered Three Wheeler Using PM Hub Motor Prototype IDocument4 pagesDevelopment of Small Battery Powered Three Wheeler Using PM Hub Motor Prototype IKapish SharmaNo ratings yet
- Electric BikeDocument5 pagesElectric BikeRakesh NayakNo ratings yet
- Torque Vectoring For Electric Vehicles With Individually Controlled Motors: State-of-the-Art and Future DevelopmentsDocument12 pagesTorque Vectoring For Electric Vehicles With Individually Controlled Motors: State-of-the-Art and Future DevelopmentseldincelebicNo ratings yet
- A Project Seminar On: Design and Fabrication of Hybrid Electric BikeDocument19 pagesA Project Seminar On: Design and Fabrication of Hybrid Electric BikeNaziya TazeenNo ratings yet
- Hybrid Electrical VehiclesDocument12 pagesHybrid Electrical Vehiclesinsta gramNo ratings yet
- Hybrid Electric VehicleDocument17 pagesHybrid Electric VehicleEEE_ProceedingsNo ratings yet
- New Generation and Hybrid Vehicle NotesDocument93 pagesNew Generation and Hybrid Vehicle NotespavanraneNo ratings yet
- IntershipDocument14 pagesIntershipshahid abdulNo ratings yet
- Review of Modern Vehicle Powertrains and Their Modelling and Simulation in MATLAB/SimulinkDocument19 pagesReview of Modern Vehicle Powertrains and Their Modelling and Simulation in MATLAB/Simulinkan1088No ratings yet
- E3sconf Icregcsd2023 01006Document12 pagesE3sconf Icregcsd2023 01006kanchanmshinde2000No ratings yet
- 1 OnlineDocument10 pages1 OnlineMangeshNo ratings yet
- Friction EstimationDocument6 pagesFriction EstimationPietroNo ratings yet
- Assessment of BLDC Motor For EV Application Considering Vehicle Design StrategyDocument7 pagesAssessment of BLDC Motor For EV Application Considering Vehicle Design StrategyPremier PublishersNo ratings yet
- Electromagnetic Braking System: 1.backgroundDocument2 pagesElectromagnetic Braking System: 1.backgroundZiyad BhatalaNo ratings yet
- Vtu Electricvehecles Module2openelectivepptbydr 221021054719 1293bcdfDocument64 pagesVtu Electricvehecles Module2openelectivepptbydr 221021054719 1293bcdfprashantkumar chinamalliNo ratings yet
- Motores de Imánes Permanentes y de InductanciaDocument5 pagesMotores de Imánes Permanentes y de InductanciaFreddy Julián Chipugsi CaleroNo ratings yet
- Electric - Motorcycle - Modeling - For - Speed - Tracking - and - Range - Travelled - Estimation IEEE ACCESSDocument9 pagesElectric - Motorcycle - Modeling - For - Speed - Tracking - and - Range - Travelled - Estimation IEEE ACCESSOsito de AguaNo ratings yet
- Control of Electric Vehicle PDFDocument31 pagesControl of Electric Vehicle PDFBrunoZueroNo ratings yet
- Energies 12 04615 v2Document19 pagesEnergies 12 04615 v2wgjsesotxjxzosyxjpNo ratings yet
- A Survey and Comparison of Characteristics of Motor Drives Used in Electric VehiclesDocument4 pagesA Survey and Comparison of Characteristics of Motor Drives Used in Electric VehiclesGabriel de SáNo ratings yet
- Esgin Skaboard PDFDocument11 pagesEsgin Skaboard PDFJimmy Joel ColqueNo ratings yet
- Mod-5 22 Eme13Document22 pagesMod-5 22 Eme13SHARATH RNo ratings yet
- Mod-5 22 Eme13Document20 pagesMod-5 22 Eme13SHARATH RNo ratings yet
- Future Vehicle Society Based On Electric Motor, Capacitor and Wireless Power SupplyDocument5 pagesFuture Vehicle Society Based On Electric Motor, Capacitor and Wireless Power Supplyducvinhhung2No ratings yet
- Wheel Slip Control For All Wheel Drive eDocument31 pagesWheel Slip Control For All Wheel Drive elinh quangNo ratings yet
- Traction Motors and Speed Estimation Techniques For Sensorless Control of Electric Vehicles: A ReviewDocument6 pagesTraction Motors and Speed Estimation Techniques For Sensorless Control of Electric Vehicles: A ReviewShovan DeyNo ratings yet
- Dynamic Simulation of Electric Bus VehicleDocument6 pagesDynamic Simulation of Electric Bus VehiclethesijNo ratings yet
- Vishwajeet Kumar (STM)Document18 pagesVishwajeet Kumar (STM)Abhijeet RajNo ratings yet
- Design of Electric ScooterDocument22 pagesDesign of Electric ScooterRithik Gowda80% (5)
- Literature Review of BLDCDocument6 pagesLiterature Review of BLDCsushil63666No ratings yet
- 3 Sneha SeminarDocument21 pages3 Sneha SeminarNamrta DeokateNo ratings yet
- Critical Review of Direct-Drive Electrical Machine Systems For Electric and Hybrid Electric VehiclesDocument12 pagesCritical Review of Direct-Drive Electrical Machine Systems For Electric and Hybrid Electric VehiclesFrankenstein ReichNo ratings yet
- Module 5Document17 pagesModule 5Pragati ShindeNo ratings yet
- Study of The Braking Performance On Different Natures and Conditions of The Road of The BMW M4 GTS ModelDocument8 pagesStudy of The Braking Performance On Different Natures and Conditions of The Road of The BMW M4 GTS ModelDani BogdanNo ratings yet
- Drive Train Design and Modeling of A Parallel Diesel Hybrid Electric Bus Based On AVL/CruiseDocument7 pagesDrive Train Design and Modeling of A Parallel Diesel Hybrid Electric Bus Based On AVL/CruisewahonotNo ratings yet
- Wa0055.Document33 pagesWa0055.STRIKER FFNo ratings yet
- Regen Rat IveDocument35 pagesRegen Rat IveEr Dinesh TambeNo ratings yet
- Electric Vehicle Conversion Based On Distance, Speed and Cost RequirementsDocument9 pagesElectric Vehicle Conversion Based On Distance, Speed and Cost RequirementsVo SantosNo ratings yet
- IMPROVING ELECTRIC VEHICLE ENERGY EFFICIENCY WITH TWO SPEED GEARBOX Ijariie22179Document7 pagesIMPROVING ELECTRIC VEHICLE ENERGY EFFICIENCY WITH TWO SPEED GEARBOX Ijariie22179sonal Nanasaheb mhaseNo ratings yet
- Model Based System Design For Electric Vehicle ConDocument19 pagesModel Based System Design For Electric Vehicle ConAmanuelAlemaNo ratings yet
- PowerEfficiente BikewithTerrainAdaptiveIntelligenceDocument7 pagesPowerEfficiente BikewithTerrainAdaptiveIntelligenceTanzeelaNo ratings yet
- Energies: An Intelligent Regenerative Braking Strategy For Electric VehiclesDocument17 pagesEnergies: An Intelligent Regenerative Braking Strategy For Electric VehiclesSumitKumarNo ratings yet
- Trzaska - Effective Harvesting of BrakingDocument16 pagesTrzaska - Effective Harvesting of BrakingNaveen BosNo ratings yet
- E3sconf SeFet2019 01029Document6 pagesE3sconf SeFet2019 01029DONE AND DUSTEDNo ratings yet
- Powertrain Test Facility Design and ConstructionDocument5 pagesPowertrain Test Facility Design and ConstructionAustine Crucillo TangNo ratings yet
- Research Muneer LyatiDocument10 pagesResearch Muneer LyatiBedasa AbdisaNo ratings yet
- MTEV - Fundamentals of EVDocument2 pagesMTEV - Fundamentals of EVDipali Shankar SahooNo ratings yet
- Drive Design in Electric VehiclesDocument7 pagesDrive Design in Electric Vehiclesbzkizo_sbbNo ratings yet
- Car Examples ComparisonDocument14 pagesCar Examples ComparisonNigamanand RaoNo ratings yet
- Hybrid Electric VehicleDocument4 pagesHybrid Electric VehicleIOSRjournalNo ratings yet
- Hybrid Vehicle ReportDocument17 pagesHybrid Vehicle ReportMidhun S Jacob100% (1)
- Basics of Electric Vehicle Technology and A Design StudyDocument5 pagesBasics of Electric Vehicle Technology and A Design StudyHuynh Thanh AnhNo ratings yet
- Electrical Motors For Electric Vehicle An OverviewDocument7 pagesElectrical Motors For Electric Vehicle An OverviewFarhodjon AbdusamatovNo ratings yet
- Iet-Est 2016 0023Document7 pagesIet-Est 2016 0023Hsan HaddarNo ratings yet
- Acdc - DC Generator - Lecture Notes 2Document42 pagesAcdc - DC Generator - Lecture Notes 2Cllyan Reyes100% (1)
- EE8002 Design of Electrical ApparatusDocument2 pagesEE8002 Design of Electrical ApparatuskrishnandrkNo ratings yet
- Transformer: 5 AmpsDocument10 pagesTransformer: 5 AmpsMohd Abu AjajNo ratings yet
- EE580 - Mid Semester Examination: Marks DistributionDocument17 pagesEE580 - Mid Semester Examination: Marks DistributiongyanNo ratings yet
- Ee 6 FinalsDocument3 pagesEe 6 FinalsSantos, Jewella C.No ratings yet
- Chapter-2 TransformersDocument148 pagesChapter-2 TransformersAli MoharramNo ratings yet
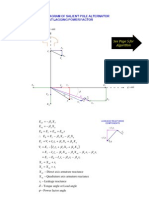
- Synchronous (Salient Pole) Machine Phasor DiagramDocument5 pagesSynchronous (Salient Pole) Machine Phasor DiagramMELVIN88% (8)
- PH HCS TB-0009 Waterman To Parker Coil Cross ReferenceDocument2 pagesPH HCS TB-0009 Waterman To Parker Coil Cross Referencejohn deereNo ratings yet
- Wiki Brushless MotorDocument3 pagesWiki Brushless MotorKaustubh AsawaNo ratings yet
- Permanent Magnet DC MotorDocument4 pagesPermanent Magnet DC MotorPulkit ChaudhariNo ratings yet
- Auto TransformerDocument22 pagesAuto TransformerNANDHAKUMAR ANo ratings yet
- Subject Wise Details 7.5 Electrical Machines - IiDocument35 pagesSubject Wise Details 7.5 Electrical Machines - IiBISLA ANO0% (2)
- Overall DimensionsDocument16 pagesOverall DimensionsrajapeeeNo ratings yet
- DC Motor Characteristic-1Document12 pagesDC Motor Characteristic-1Maysara BalakiNo ratings yet
- KEYSIGHT RATIO WINDING TRAX - Test ReportDocument5 pagesKEYSIGHT RATIO WINDING TRAX - Test Reportakmal syafiqNo ratings yet
- COMPOUND EXCITED DC MOTOR - 1023 ING - Vers 2012Document50 pagesCOMPOUND EXCITED DC MOTOR - 1023 ING - Vers 2012pezhman bayatNo ratings yet
- Three Phase Induction RegulatorDocument5 pagesThree Phase Induction RegulatormohamedmohebNo ratings yet
- Construction of Simple Electric MotorDocument5 pagesConstruction of Simple Electric MotormohkristNo ratings yet
- Unit 3 - DC Machines - Part CDocument54 pagesUnit 3 - DC Machines - Part CMaribe TshegoNo ratings yet
- Project On Dol Starter For FWD P &rev P &FWD Inching &REV INCHING Along With Remote FWD P &remote Stop For S .C.I.MotorDocument29 pagesProject On Dol Starter For FWD P &rev P &FWD Inching &REV INCHING Along With Remote FWD P &remote Stop For S .C.I.MotorAishwary DixitNo ratings yet
- Ee 2302 - Electrical Machines Ii Unit - I Synchronous Generator Part-ADocument5 pagesEe 2302 - Electrical Machines Ii Unit - I Synchronous Generator Part-AnandhakumarmeNo ratings yet
- T510 - ELECTRICAL TRADE THEORY N2 QP AUG 2020 Signed OffDocument8 pagesT510 - ELECTRICAL TRADE THEORY N2 QP AUG 2020 Signed OffYanga KalipaNo ratings yet
- Design and Assembly of 100KVA Transformer: A Practicum Report OnDocument53 pagesDesign and Assembly of 100KVA Transformer: A Practicum Report Ondip bormanNo ratings yet
- Comparisan Self Induction and Mutual InductionDocument2 pagesComparisan Self Induction and Mutual InductionWong Chai YenNo ratings yet
- EMD SyllabusDocument2 pagesEMD Syllabuskkk212No ratings yet
- AC Machines Lecture NotesDocument48 pagesAC Machines Lecture Notessenthilkumar100% (4)
- Unit-IV-Induction MotorsDocument57 pagesUnit-IV-Induction MotorssujithNo ratings yet
- Presentetion DC Motor 110Document16 pagesPresentetion DC Motor 110Syed muhammad zaidiNo ratings yet
- DC Motor Speed ControlDocument19 pagesDC Motor Speed ControlEngr. Asif malikNo ratings yet
- CH-7 Alternating CurrentDocument90 pagesCH-7 Alternating CurrentAviralTNo ratings yet