You might also like
- Sensors and Transducers: Mechatronics - Unit 1, Chapter 2Document41 pagesSensors and Transducers: Mechatronics - Unit 1, Chapter 2Vinay KNo ratings yet
- State of The Art Predictive Maintenance TechniquesDocument11 pagesState of The Art Predictive Maintenance TechniquesMIGUEL ANGEL DURON SAAVEDRA100% (1)
- Sensors For Mobile Robots - Theory and ApplicationsDocument543 pagesSensors For Mobile Robots - Theory and ApplicationsJacob Nuñez Garcia100% (1)
- A Quick and Easy Guide in Using SPSS for Linear Regression AnalysisFrom EverandA Quick and Easy Guide in Using SPSS for Linear Regression AnalysisNo ratings yet
- Independent Samples T Test - Activity SheetDocument4 pagesIndependent Samples T Test - Activity SheetMax SantosNo ratings yet
- SKF Microlog Accessories CatalogueDocument89 pagesSKF Microlog Accessories CatalogueAlex Porro SeclenNo ratings yet
- FMCW Radar App Note PDFDocument43 pagesFMCW Radar App Note PDFSrinivas Cheruku100% (1)
- Wavelength Electronics Product Catalog 2012Document20 pagesWavelength Electronics Product Catalog 2012Wavelength Electronics, Inc.No ratings yet
- Komatsu PC300 Errors CodeDocument6 pagesKomatsu PC300 Errors CodeMg Roy87% (15)
- Manual - Flame Detectors - UV UVIR IR3Document19 pagesManual - Flame Detectors - UV UVIR IR3AbdelRahmanNo ratings yet
- Estimation of Blood Pressure Levels From Reflective Photoplethysmograph Using Smart PhonesDocument5 pagesEstimation of Blood Pressure Levels From Reflective Photoplethysmograph Using Smart PhonesNguyễn CươngNo ratings yet
- Asthi Kshaya ThesisDocument8 pagesAsthi Kshaya Thesislupitavickreypasadena100% (2)
- A Comparison of Methods For Analyzing Drop JumpDocument20 pagesA Comparison of Methods For Analyzing Drop JumpJose Acuña YepesNo ratings yet
- Lab Test # 1: Cantilever Beam Experiment: ObjectivesDocument7 pagesLab Test # 1: Cantilever Beam Experiment: ObjectivesAli GhNo ratings yet
- BME473 Homework 4Document6 pagesBME473 Homework 4telatoyoNo ratings yet
- An Algorithm of ST Segment Classification and DetectionDocument6 pagesAn Algorithm of ST Segment Classification and DetectionKętrzyn KękolsNo ratings yet
- LAB 1-Beam DeflectionDocument5 pagesLAB 1-Beam DeflectionNur Astuty100% (1)
- Testing System Development For Creep Characterization of PolymersDocument6 pagesTesting System Development For Creep Characterization of PolymersJames UgoNo ratings yet
- Accuracy Analysis of Diferent Probes Used in Articulated Arm Coordinate Measuring MachinesDocument4 pagesAccuracy Analysis of Diferent Probes Used in Articulated Arm Coordinate Measuring MachinesAgustin Brau AvilaNo ratings yet
- Lab 3: Strain Gages: Application and Measurement: Dan McconnellDocument5 pagesLab 3: Strain Gages: Application and Measurement: Dan McconnellAaron PetersNo ratings yet
- Calculation Techniques of Two-Dimensional Residual Stress Field For Mechanical Engineering ApplicationDocument4 pagesCalculation Techniques of Two-Dimensional Residual Stress Field For Mechanical Engineering Applicationjperdigon9634No ratings yet
- Uniform Acceleration FinalDocument8 pagesUniform Acceleration FinalJean BeaverNo ratings yet
- Calculating Indicators With Pythonbiogeme: Michel Bierlaire May 17, 2017Document38 pagesCalculating Indicators With Pythonbiogeme: Michel Bierlaire May 17, 2017Hien LeNo ratings yet
- Module 13-Gage R&R AnalysisDocument32 pagesModule 13-Gage R&R Analysisramasamy_lNo ratings yet
- C !" !! !#$"%&'!$ (#) ( (C !" !!!#$"%+&+'!$ +!%PMDocument8 pagesC !" !! !#$"%&'!$ (#) ( (C !" !!!#$"%+&+'!$ +!%PMing_nistorNo ratings yet
- DFSS SciPyDocument7 pagesDFSS SciPyGoran ChristianssonNo ratings yet
- Lab2 - Mass Flow RateDocument11 pagesLab2 - Mass Flow Ratearashmehr9100% (1)
- A Method To Obtain 3D Kinematics Data of Whole High Jump MovementDocument4 pagesA Method To Obtain 3D Kinematics Data of Whole High Jump MovementSumit RawatNo ratings yet
- A Machine Vision System For Inspecting BearingsDocument4 pagesA Machine Vision System For Inspecting BearingsDeepak SharmaNo ratings yet
- Elbow Joint 3D Scan Info 2Document5 pagesElbow Joint 3D Scan Info 2Phi NguyenNo ratings yet
- Figure 1: Gross Motor Skill (P : 1.18 10 - 7) Significant DifferenceDocument13 pagesFigure 1: Gross Motor Skill (P : 1.18 10 - 7) Significant Differenceapi-341868324No ratings yet
- Photon StatisticsDocument11 pagesPhoton StatisticsyoitssmeNo ratings yet
- Image AnalysisDocument6 pagesImage Analysissageson_m-1No ratings yet
- Smoothing The DataDocument5 pagesSmoothing The DataSANJAY OLINo ratings yet
- RedondeoDocument13 pagesRedondeoAdrianNo ratings yet
- Arima Cho Usd EurDocument15 pagesArima Cho Usd EurTheRedAresNo ratings yet
- School of Electrical and Electronic Engineering Nanyang Technological University, Singapore 639798 Ehyguan@ntu - Edu.sgDocument4 pagesSchool of Electrical and Electronic Engineering Nanyang Technological University, Singapore 639798 Ehyguan@ntu - Edu.sgNirmal KushwahaNo ratings yet
- Human Identification From Body ShapeDocument7 pagesHuman Identification From Body ShapeLuke CordenNo ratings yet
- 2D Versus 3D Kinematic Horse Trot Miró 2009Document7 pages2D Versus 3D Kinematic Horse Trot Miró 2009Fernanda GodoiNo ratings yet
- International Refereed Journal of Engineering and Science (IRJES)Document7 pagesInternational Refereed Journal of Engineering and Science (IRJES)www.irjes.comNo ratings yet
- Final Lab Report 212-1Document16 pagesFinal Lab Report 212-1Dipak Rajput100% (1)
- Adelaide: Y 2.4603+1.0148 Ecsp Sos 1608.6942 RMS 2.1139Document4 pagesAdelaide: Y 2.4603+1.0148 Ecsp Sos 1608.6942 RMS 2.1139Joe Di NapoliNo ratings yet
- Meeting RecognisionDocument4 pagesMeeting RecognisionpeterijNo ratings yet
- Cam Follower Lab ReportDocument16 pagesCam Follower Lab ReportAustin Williams80% (5)
- Finite Element Analysis of Elliptical Pressure VesselsDocument7 pagesFinite Element Analysis of Elliptical Pressure VesselsAJER JOURNALNo ratings yet
- TimeSeries Ch6Document11 pagesTimeSeries Ch6aiwen_wong2428No ratings yet
- Optimization Model For GPS Height FittingDocument4 pagesOptimization Model For GPS Height FittingPablo CórdovaNo ratings yet
- Lab 1 1Document8 pagesLab 1 1api-524551643No ratings yet
- Significant Figures and MeasurementsDocument8 pagesSignificant Figures and MeasurementsBilal HazratNo ratings yet
- SSM Iii 06Document9 pagesSSM Iii 06Nisreen ArabiyatNo ratings yet
- BIOBASE Automated ESR Analyzer EA40 Series User ManualDocument24 pagesBIOBASE Automated ESR Analyzer EA40 Series User Manualsoporte03No ratings yet
- Model Based and Iconic Multimodal Registration To Merge Gated Cardiac PET, CT and MR SequencesDocument4 pagesModel Based and Iconic Multimodal Registration To Merge Gated Cardiac PET, CT and MR SequencesAnaAAAMNo ratings yet
- Quality EngineeringDocument13 pagesQuality Engineeringiremka2000No ratings yet
- Ecr2017 C-1136Document23 pagesEcr2017 C-1136Christhall Oyarzun VelizNo ratings yet
- 1609 00096 PDFDocument6 pages1609 00096 PDFBudi RahmaniNo ratings yet
- FatigueTestingof A SuspensionDocument8 pagesFatigueTestingof A Suspensionbookmania2No ratings yet
- Classification of Gait Phases From Lower Limb EMG: Application To Exoskeleton OrthosisDocument4 pagesClassification of Gait Phases From Lower Limb EMG: Application To Exoskeleton OrthosisshravantataNo ratings yet
- ProjectilemotionlabDocument4 pagesProjectilemotionlabapi-249694223No ratings yet
- Fan Cart AbstractDocument2 pagesFan Cart AbstractDeva DevaNo ratings yet
- Mihradi 2011Document5 pagesMihradi 2011Ezard EismailNo ratings yet
- Zdolnosc Maszyny Sugi-94-259 BonarDocument10 pagesZdolnosc Maszyny Sugi-94-259 BonarAndrzej JasieńskiNo ratings yet
- Web ApplicationDocument13 pagesWeb Applicationouiam ouhdifaNo ratings yet
- Face Recognition Using A New Texture Representation of Face ImagesDocument6 pagesFace Recognition Using A New Texture Representation of Face ImagesElaya RajaNo ratings yet
- FW No.1 PacingDocument6 pagesFW No.1 PacingyatotoyNo ratings yet
- Surveying Fieldwork 1Document5 pagesSurveying Fieldwork 1Turingan, Angela2CNo ratings yet
- TUe 4AUB20 Exercise1Document8 pagesTUe 4AUB20 Exercise1Saad ullah ZiaNo ratings yet
- Measurement of Length - Screw Gauge (Physics) Question BankFrom EverandMeasurement of Length - Screw Gauge (Physics) Question BankNo ratings yet
- Gait Cycle Topic 2: Measurement of Gait KinematicsDocument13 pagesGait Cycle Topic 2: Measurement of Gait Kinematicschungkailun1No ratings yet
- Gait Cycle Topic 1 The Temporal-Spatial ParametersDocument20 pagesGait Cycle Topic 1 The Temporal-Spatial Parameterschungkailun1No ratings yet
- Plantar Pressure Distribution Among Older PersonDocument7 pagesPlantar Pressure Distribution Among Older Personchungkailun1No ratings yet
- Gait Cycle Topic 5: The Ground Reaction in Normal GaitDocument14 pagesGait Cycle Topic 5: The Ground Reaction in Normal Gaitchungkailun1No ratings yet
- Gait Cycle Topic 4 Biomechanic of StandingDocument10 pagesGait Cycle Topic 4 Biomechanic of Standingchungkailun1No ratings yet
- The Effect of Forefoot Varus On Postural StabilityDocument7 pagesThe Effect of Forefoot Varus On Postural Stabilitychungkailun1No ratings yet
- The Assessment of Dynamic FootToGround Contact Force and Plantar Pressure Distribution ReviewDocument16 pagesThe Assessment of Dynamic FootToGround Contact Force and Plantar Pressure Distribution Reviewchungkailun1No ratings yet
- The Influence of The Reciprocal Hip Joint Link in The Advanced Reciprocating Gait Orthosis On Standing Performance in ParaplegiaDocument12 pagesThe Influence of The Reciprocal Hip Joint Link in The Advanced Reciprocating Gait Orthosis On Standing Performance in Paraplegiachungkailun1No ratings yet
- The Study of Plantar Pressure Distribution in Normal and Pathological FootDocument11 pagesThe Study of Plantar Pressure Distribution in Normal and Pathological Footchungkailun1No ratings yet
- A Walking Monitoring Shoe System For Simultaneous Plantar-Force Measurement and Gait-Phase DetectionDocument6 pagesA Walking Monitoring Shoe System For Simultaneous Plantar-Force Measurement and Gait-Phase Detectionchungkailun1No ratings yet
- Plantar Pressure Distribution MeasurementsDocument6 pagesPlantar Pressure Distribution Measurementschungkailun1No ratings yet
- Design and Development of A Force-Sensing Shoe For Gait Analysis and MonitoringDocument4 pagesDesign and Development of A Force-Sensing Shoe For Gait Analysis and Monitoringchungkailun1No ratings yet
- A Human Identification Method Based On Dynamic Plantar Pressure DistributionDocument4 pagesA Human Identification Method Based On Dynamic Plantar Pressure Distributionchungkailun1No ratings yet
- Honeywell Sensing Airflow Sensors Awm700 Series Datasheet 32301627 B en PDFDocument7 pagesHoneywell Sensing Airflow Sensors Awm700 Series Datasheet 32301627 B en PDFAlejandro Palomino AmaroNo ratings yet
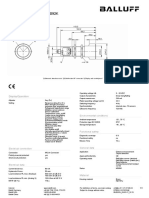
- Sensor Balluf Ultrasonido 5mtsDocument3 pagesSensor Balluf Ultrasonido 5mtsMaikel OchoaNo ratings yet
- SEMINAR REPORT On Microelectronic Pill1Document31 pagesSEMINAR REPORT On Microelectronic Pill1Smita Farande80% (5)
- Electronics Hub: Interfacing ACS712 Current Sensor With Arduino - Measure Current With ArduinoDocument16 pagesElectronics Hub: Interfacing ACS712 Current Sensor With Arduino - Measure Current With ArduinoSanjeevNo ratings yet
- BA001CENDocument21 pagesBA001CENCristian Del Alamo100% (1)
- Finroc Crash CourseDocument21 pagesFinroc Crash CourseLuis GonzalesNo ratings yet
- Jumping Into Industry 4.0 With Predictive Maintenance SolutionsDocument26 pagesJumping Into Industry 4.0 With Predictive Maintenance SolutionsNantha Kumara PeriasamyNo ratings yet
- Module IDocument16 pagesModule IVenkata DineshNo ratings yet
- Geca Gamma652 oDocument3 pagesGeca Gamma652 opaul kioiNo ratings yet
- Fault Code: 352 Sensor Supply 1 Circuit - Voltage Below Normal or Shorted To Low SourceDocument3 pagesFault Code: 352 Sensor Supply 1 Circuit - Voltage Below Normal or Shorted To Low SourceFernando AguilarNo ratings yet
- TC544 TC244 TC344 PDFDocument3 pagesTC544 TC244 TC344 PDFGaurav AgrawalNo ratings yet
- 0281002593Document3 pages0281002593Richard Andrianjaka LuckyNo ratings yet
- ConfigDaliModule DOC v11 enDocument45 pagesConfigDaliModule DOC v11 ensklee0730No ratings yet
- 2021-12-Clamp Proximity Sensor TestingDocument4 pages2021-12-Clamp Proximity Sensor TestingSARET respaldoNo ratings yet
- Sensors: Krishna Shah Prabin Bhandari Subash Gautam Suresh BhandariDocument25 pagesSensors: Krishna Shah Prabin Bhandari Subash Gautam Suresh BhandariSubash GautamNo ratings yet
- Data Sheet MR-3Document2 pagesData Sheet MR-3shlashmedNo ratings yet
- KrotoFinder PPTDocument10 pagesKrotoFinder PPTMallikaNo ratings yet
- WadiLeban IWSHMDocument9 pagesWadiLeban IWSHMishu vohraNo ratings yet
- Biomedical EngineeringDocument5 pagesBiomedical EngineeringnatiNo ratings yet
- For The Detection of Air Contaminants: Applications: FeaturesDocument2 pagesFor The Detection of Air Contaminants: Applications: FeaturesRizky Agung WicaksonoNo ratings yet
- TransducersDocument19 pagesTransducersTsihatesfaNo ratings yet
- Flyer Hygrophil F5673Document4 pagesFlyer Hygrophil F5673Subin ThomasNo ratings yet