You might also like
- Robust Tracking Control of A Quadrotor Helicopter Without Velocity MeasurementDocument6 pagesRobust Tracking Control of A Quadrotor Helicopter Without Velocity MeasurementadilsondissoNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Helicopter SimulationDocument7 pagesHelicopter SimulationAvinash DoddaNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- A Sensorless Robust Vector Control of Induction Motor DrivesDocument6 pagesA Sensorless Robust Vector Control of Induction Motor DrivesLava KumarNo ratings yet
- Digital Feedback SystemsDocument8 pagesDigital Feedback SystemsAdrian ArasuNo ratings yet
- Semi-Active Suspension Control Design for VehiclesFrom EverandSemi-Active Suspension Control Design for VehiclesRating: 5 out of 5 stars5/5 (1)
- Pitch Control System Using LQR and Fuzzy Logic Controller: Nurbaiti@tganu - Uitm.edu - My Fuaad@fke - Utm.myDocument6 pagesPitch Control System Using LQR and Fuzzy Logic Controller: Nurbaiti@tganu - Uitm.edu - My Fuaad@fke - Utm.myStefania OliveiraNo ratings yet
- Clemson University College of Engineering and Science Control and Robotics (CRB) Technical ReportDocument8 pagesClemson University College of Engineering and Science Control and Robotics (CRB) Technical ReportMazin el-HagNo ratings yet
- Helicopter Maneuvers Manual: A step-by-step illustrated guide to performing all helicopter flight operationsFrom EverandHelicopter Maneuvers Manual: A step-by-step illustrated guide to performing all helicopter flight operationsRating: 5 out of 5 stars5/5 (1)
- Stability1 3Document8 pagesStability1 3Hajer_ZNo ratings yet
- Cam Experimental Lab: ObjectiveDocument8 pagesCam Experimental Lab: ObjectiveMuhammad Changez Khan100% (2)
- Modeling and Altitude Control of Quad-Rotor UAVDocument6 pagesModeling and Altitude Control of Quad-Rotor UAVescanusNo ratings yet
- I Sucker Rod PumpingDocument101 pagesI Sucker Rod PumpingJainik Jain100% (1)
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- Appendix B Performance Analysis of A Subsonic Jet Transport - 3 TopicsDocument12 pagesAppendix B Performance Analysis of A Subsonic Jet Transport - 3 TopicsalysonmicheaalaNo ratings yet
- Attitude Control of A QuadrotorDocument6 pagesAttitude Control of A QuadrotorGhada BeydounNo ratings yet
- Sliding Mode Control Strategy For A 6 DOF Quadrotor HelicopterDocument7 pagesSliding Mode Control Strategy For A 6 DOF Quadrotor HelicopternaderjsaNo ratings yet
- 56 421Document10 pages56 421nguyendattdhNo ratings yet
- Final Project FinalReport VikasYADAVDocument12 pagesFinal Project FinalReport VikasYADAVviya123No ratings yet
- Domlabmanualnew 110517072428 Phpapp02Document44 pagesDomlabmanualnew 110517072428 Phpapp02Mandeep Singh PundirNo ratings yet
- KKJJJJJJJBDocument5 pagesKKJJJJJJJBVigneshRamakrishnanNo ratings yet
- Missile Roll Control Part IIDocument9 pagesMissile Roll Control Part IID.Viswanath100% (2)
- Lab 3 - Gyroscope Stabilized PlatformDocument13 pagesLab 3 - Gyroscope Stabilized PlatformFabian ZenderNo ratings yet
- Unmanned Aerial Vehicle: Malaviya National Institute of Technology, JaipurDocument35 pagesUnmanned Aerial Vehicle: Malaviya National Institute of Technology, JaipurAjeetNo ratings yet
- Aircraft SteeringDocument5 pagesAircraft SteeringAnonymous LtvdduNo ratings yet
- Fig. 2 The Model of A DC MotorDocument10 pagesFig. 2 The Model of A DC MotorFatih SalihovicNo ratings yet
- A Mathematical Model of The UH-60 HelicopterDocument46 pagesA Mathematical Model of The UH-60 HelicopterSplash1100% (1)
- Adaptive Force Balancing An Unbalanced Rotor: Jasim Ahmed and Dennis S. Bernstein'Document6 pagesAdaptive Force Balancing An Unbalanced Rotor: Jasim Ahmed and Dennis S. Bernstein'Jessica SandersNo ratings yet
- Engineering Reference: Sizing and Selection of Exlar Linear and Rotary ActuatorsDocument8 pagesEngineering Reference: Sizing and Selection of Exlar Linear and Rotary ActuatorsJelena BauerNo ratings yet
- The Trajectory Tracking Problem For Quadrotor System: Na Zhang and Qing-He WuDocument6 pagesThe Trajectory Tracking Problem For Quadrotor System: Na Zhang and Qing-He WunguyendattdhNo ratings yet
- Urban Arterial Travel Time VariabilityDocument23 pagesUrban Arterial Travel Time Variabilityparupuk9No ratings yet
- MATLAB SIMULATIONS FOR GARNELL's PITCH AUTOPILOTDocument8 pagesMATLAB SIMULATIONS FOR GARNELL's PITCH AUTOPILOTD.Viswanath100% (1)
- DC Control MethodDocument22 pagesDC Control MethodSyed Haidar Ali ZaidiNo ratings yet
- Print It 2Document5 pagesPrint It 2shihab4806No ratings yet
- Engineering Flight Simulator Using MATLAB, Python and Flight GearDocument5 pagesEngineering Flight Simulator Using MATLAB, Python and Flight GearmegustalazorraNo ratings yet
- EML 5311 Project 28 April Ramin ShamshiriDocument33 pagesEML 5311 Project 28 April Ramin ShamshiriRedmond R. ShamshiriNo ratings yet
- List of Dynamic Systems 2008Document15 pagesList of Dynamic Systems 2008Muhammad Feisal IliasNo ratings yet
- 3 Inverted Pendulum ProjectDocument26 pages3 Inverted Pendulum ProjectJoshua D JohnNo ratings yet
- Kinematics Final PrintDocument7 pagesKinematics Final PrintBrady BriffaNo ratings yet
- Missile Roll Control Part IV - Modern Control ApproachDocument8 pagesMissile Roll Control Part IV - Modern Control ApproachD.ViswanathNo ratings yet
- Theoretical and Experimental Investigation of Gain Scheduling and Adaptive Autopilots For A Model BoatDocument10 pagesTheoretical and Experimental Investigation of Gain Scheduling and Adaptive Autopilots For A Model BoatJuan Santiago Latigo ColliNo ratings yet
- 03 2008 JA PS A 1 008 CleanDocument6 pages03 2008 JA PS A 1 008 CleanBentarfa IslamNo ratings yet
- Dom Lab Manual NewDocument44 pagesDom Lab Manual NewjeyashrirangamNo ratings yet
- Motor Selection, Inertia PDFDocument6 pagesMotor Selection, Inertia PDFIswar Rauf Aboo 'AqilahNo ratings yet
- 090443P - Synchronous Generator Transient AnalysisDocument16 pages090443P - Synchronous Generator Transient AnalysisManoj JayaruwanNo ratings yet
- Linear Algebra in Action!Document29 pagesLinear Algebra in Action!Chegrani AhmedNo ratings yet
- Calculation of Torque For Selection of MotorDocument6 pagesCalculation of Torque For Selection of Motoratanughosh125100% (6)
- PID For Fixed-Wing UAV PDFDocument6 pagesPID For Fixed-Wing UAV PDFMUVNNo ratings yet
- Experiment 3Document15 pagesExperiment 3Ashwin PurohitNo ratings yet
- JIE1 ModDocument6 pagesJIE1 ModAshwani RanaNo ratings yet
- Missile Control Part IDocument13 pagesMissile Control Part ID.Viswanath100% (2)
- Actuator Fault Detection System For A Mini-Quadrotor: A. Freddi, S. Longhi and A. MonteriùDocument6 pagesActuator Fault Detection System For A Mini-Quadrotor: A. Freddi, S. Longhi and A. MonteriùadilsondissoNo ratings yet
- R 2809134Document13 pagesR 2809134Patrícia AbreuNo ratings yet
- EVOM ManualDocument2 pagesEVOM ManualHouston WhiteNo ratings yet
- Эквивалентная Схема Мотра Теслы с Thomas2020Document7 pagesЭквивалентная Схема Мотра Теслы с Thomas2020Алексей ЯмаNo ratings yet
- Fundamentals of Signal and Power Integrity PDFDocument46 pagesFundamentals of Signal and Power Integrity PDFjaltitiNo ratings yet
- Decision Trees For Management of An Avulsed Permanent ToothDocument2 pagesDecision Trees For Management of An Avulsed Permanent ToothAbhi ThakkarNo ratings yet
- Ci Thai RiceDocument4 pagesCi Thai RiceMakkah Madina riceNo ratings yet
- ResumeDocument3 pagesResumeapi-280300136No ratings yet
- Modern and Nonlinear OpticsDocument181 pagesModern and Nonlinear Opticssoma_venuNo ratings yet
- Editan - Living English (CD Book)Document92 pagesEditan - Living English (CD Book)M Luthfi Al QodryNo ratings yet
- EAC Inquiry SDCDocument9 pagesEAC Inquiry SDCThe Sustainable Development Commission (UK, 2000-2011)No ratings yet
- Moquerio - Defense Mechanism ActivityDocument3 pagesMoquerio - Defense Mechanism ActivityRoxan MoquerioNo ratings yet
- Dwnload Full Beckers World of The Cell 9th Edition Hardin Solutions Manual PDFDocument35 pagesDwnload Full Beckers World of The Cell 9th Edition Hardin Solutions Manual PDFgebbielean1237100% (12)
- Module 1 Lesson 2Document31 pagesModule 1 Lesson 2Angela Rose BanastasNo ratings yet
- EGurukul - RetinaDocument23 pagesEGurukul - RetinaOscar Daniel Mendez100% (1)
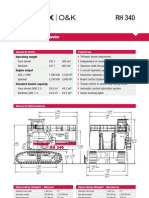
- Hydraulic Mining ExcavatorDocument8 pagesHydraulic Mining Excavatorasditia_07100% (1)
- 19c Upgrade Oracle Database Manually From 12C To 19CDocument26 pages19c Upgrade Oracle Database Manually From 12C To 19Cjanmarkowski23No ratings yet
- Pipe Cleaner Lesson PlanDocument2 pagesPipe Cleaner Lesson PlanTaylor FranklinNo ratings yet
- Sankranthi PDFDocument39 pagesSankranthi PDFMaruthiNo ratings yet
- Computers in Industry: Hugh Boyes, Bil Hallaq, Joe Cunningham, Tim Watson TDocument12 pagesComputers in Industry: Hugh Boyes, Bil Hallaq, Joe Cunningham, Tim Watson TNawabMasidNo ratings yet
- Standard Test Methods For Rheological Properties of Non-Newtonian Materials by Rotational (Brookfield Type) ViscometerDocument8 pagesStandard Test Methods For Rheological Properties of Non-Newtonian Materials by Rotational (Brookfield Type) ViscometerRodrigo LopezNo ratings yet
- Account Statement 250820 240920 PDFDocument2 pagesAccount Statement 250820 240920 PDFUnknown100% (1)
- Syllabus: What Is Artificial Intelligence? ProblemsDocument66 pagesSyllabus: What Is Artificial Intelligence? ProblemsUdupiSri groupNo ratings yet
- Agency Canvas Ing PresentationDocument27 pagesAgency Canvas Ing Presentationkhushi jaiswalNo ratings yet
- Segregation in CastingDocument17 pagesSegregation in CastingAsmaa Smsm Abdallh78% (9)
- When A Snobbish Gangster Meets A Pervert CassanovaDocument62 pagesWhen A Snobbish Gangster Meets A Pervert CassanovaMaria Shiela Mae Baratas100% (1)
- List of Some Common Surgical TermsDocument5 pagesList of Some Common Surgical TermsShakil MahmodNo ratings yet
- Feed-Pump Hydraulic Performance and Design Improvement, Phase I: J2esearch Program DesignDocument201 pagesFeed-Pump Hydraulic Performance and Design Improvement, Phase I: J2esearch Program DesignJonasNo ratings yet
- EKRP311 Vc-Jun2022Document3 pagesEKRP311 Vc-Jun2022dfmosesi78No ratings yet
- List of Sovereign States and Dependent Territories by Birth RateDocument7 pagesList of Sovereign States and Dependent Territories by Birth RateLuminita CocosNo ratings yet
- A Medium-Rise Residential Building: A B C E D F G HDocument3 pagesA Medium-Rise Residential Building: A B C E D F G HBabyjhaneTanItmanNo ratings yet
- Production of Bioethanol From Empty Fruit Bunch (Efb) of Oil PalmDocument26 pagesProduction of Bioethanol From Empty Fruit Bunch (Efb) of Oil PalmcelestavionaNo ratings yet