
AUV and ROV
AUV and ROV
You might also like
- Case 590L Backhoe: Replacement Parts CatalogDocument184 pagesCase 590L Backhoe: Replacement Parts CatalogCarla Mendez100% (1)
- Final Copy - Open Pipe Muffler 24mar2021 - With EsigDocument5 pagesFinal Copy - Open Pipe Muffler 24mar2021 - With EsigPoblacion Polomolok100% (2)
- Guía de Reemplazo de Partes para Vehículos JEEP 1987-2018Document572 pagesGuía de Reemplazo de Partes para Vehículos JEEP 1987-2018Gregor RojasNo ratings yet
- OceanxplorerspecsDocument16 pagesOceanxplorerspecssafsyahNo ratings yet
- What Can Rovs Do ?Document21 pagesWhat Can Rovs Do ?Ahmed SabryNo ratings yet
- Hdwe URintroDocument4 pagesHdwe URintroGabrielZamanNo ratings yet
- Design of A New Low Cost ROV VehicleDocument7 pagesDesign of A New Low Cost ROV VehiclePablys ZúñigaNo ratings yet
- Reson2010 McCue Yoerger 73430Document10 pagesReson2010 McCue Yoerger 73430Hieu Do TatNo ratings yet
- Hybrid ROV For 1,000 Meter OperationsDocument2 pagesHybrid ROV For 1,000 Meter OperationsTejo AlamNo ratings yet
- Design of A New Low Cost ROV VehicleDocument6 pagesDesign of A New Low Cost ROV VehicleMuhammad Yasar JavaidNo ratings yet
- Auv Fact SheetDocument1 pageAuv Fact SheetIbidhi EskanderNo ratings yet
- The Development and Ocean Testing of An AUV Docking Station For A 21 AUVDocument7 pagesThe Development and Ocean Testing of An AUV Docking Station For A 21 AUVDany PABON VILLAMIZARNo ratings yet
- Noaa 20729 DS1Document70 pagesNoaa 20729 DS1Dodo BabyNo ratings yet
- AUVDocument9 pagesAUVAhmed El-erakyNo ratings yet
- Keystone Range History ReportDocument115 pagesKeystone Range History Reportjsc7No ratings yet
- Assigment GSS411 Branches of Geomatics 2022977645Document13 pagesAssigment GSS411 Branches of Geomatics 2022977645MUHAMMAD NADZIF SAHIMINo ratings yet
- Cent Rode MasaDocument11 pagesCent Rode Masamarcelo carroNo ratings yet
- What Is ROVDocument2 pagesWhat Is ROVFhrenz Niño MagonciaNo ratings yet
- Autonomous Underwater VehicleDocument6 pagesAutonomous Underwater VehicleKiran Kumar50% (2)
- Autonomous Underwater VehicleDocument5 pagesAutonomous Underwater VehicleBiswajit PadhiNo ratings yet
- Assignment - No. 5 - Remote Operated Vehicle - (32,46,54)Document14 pagesAssignment - No. 5 - Remote Operated Vehicle - (32,46,54)jaipatelNo ratings yet
- 潜航器设计回顾Document62 pages潜航器设计回顾朱鹏飞No ratings yet
- K-Hive: Moritz Mayr - Semester ProjectDocument20 pagesK-Hive: Moritz Mayr - Semester ProjectMomonga TheGreatNo ratings yet
- Vehiculo Espacial SEV Concept FactSheetDocument4 pagesVehiculo Espacial SEV Concept FactSheetDilan Loaiza TapieroNo ratings yet
- ROV StudyDocument4 pagesROV StudyKingsley Ezenwaka100% (1)
- Otc 21515Document9 pagesOtc 21515Rasheed YusufNo ratings yet
- LECTURE No.2: Research Vessel - What Are They?Document9 pagesLECTURE No.2: Research Vessel - What Are They?Miruna ClinciuNo ratings yet
- NASA Facts From Landing To Launch Orbiter ProcessingDocument8 pagesNASA Facts From Landing To Launch Orbiter ProcessingBob AndrepontNo ratings yet
- NASA 167413main KodiakstarDocument2 pagesNASA 167413main KodiakstarNASAdocumentsNo ratings yet
- What Is An RovDocument32 pagesWhat Is An RovkasminahNo ratings yet
- Space Exploration Vehicle Concept: BackgroundDocument4 pagesSpace Exploration Vehicle Concept: BackgroundDiego Ernesto Mendivel SupoNo ratings yet
- MODULE 4 5 Nav Watch 2Document8 pagesMODULE 4 5 Nav Watch 2Faith MagluyanNo ratings yet
- O C E A N: Watching in 3DDocument16 pagesO C E A N: Watching in 3Dlelo2k3No ratings yet
- Design and Control of Autonomous Underwater Robots: A SurveyDocument18 pagesDesign and Control of Autonomous Underwater Robots: A SurveyKoushik Ch 19BME1186No ratings yet
- 2004-02-18 Stevns Power AHV AccidentDocument17 pages2004-02-18 Stevns Power AHV AccidentriggertroyNo ratings yet
- Go Fast WakesDocument6 pagesGo Fast WakesISAI LABORIEN ROMAN RUELASNo ratings yet
- (Tom2013) Topography 3D SeafloorDocument9 pages(Tom2013) Topography 3D SeafloorMiguel Angel Luque NietoNo ratings yet
- Navy Launches UAV From Submerged Submarine - Spectra 2014Document2 pagesNavy Launches UAV From Submerged Submarine - Spectra 2014U.S. Naval Research LaboratoryNo ratings yet
- NTSB Report On Seacor Power CapsizingDocument7 pagesNTSB Report On Seacor Power CapsizingThe Courier and Daily CometNo ratings yet
- SEACOR Power SRC Board Meeting SummaryDocument7 pagesSEACOR Power SRC Board Meeting SummaryAmanda JohnsonNo ratings yet
- Exploring Underwater RobotsDocument8 pagesExploring Underwater Robotspavankawade63No ratings yet
- 2.00AJ / 16.00AJ Exploring Sea, Space, & Earth: Fundamentals of Engineering DesignDocument10 pages2.00AJ / 16.00AJ Exploring Sea, Space, & Earth: Fundamentals of Engineering DesignL11r1No ratings yet
- Clubnews Vol 1 No-2Document4 pagesClubnews Vol 1 No-2lulalala8888No ratings yet
- Observation RovsDocument4 pagesObservation Rovscharles IkeNo ratings yet
- Aquarius User Manual: Florida International University (FIU)Document11 pagesAquarius User Manual: Florida International University (FIU)Divers Dream PrahaNo ratings yet
- Irjet V4i9125Document7 pagesIrjet V4i9125henyNo ratings yet
- Recovery of The GSLV Debris From The Shallow Waters of The Bay of Bengal, Off Sriharikota, Andhra Pradesh, IndiaDocument6 pagesRecovery of The GSLV Debris From The Shallow Waters of The Bay of Bengal, Off Sriharikota, Andhra Pradesh, IndiaRavi KiranNo ratings yet
- The Coast Guard at WarDocument149 pagesThe Coast Guard at WarLORANBillNo ratings yet
- English EssayDocument15 pagesEnglish Essayapi-462219695No ratings yet
- MARUM-Squid - A Powerful Yet Compact 2000 M ROV System Designed For Marine Research Operations From Smaller VesselsDocument4 pagesMARUM-Squid - A Powerful Yet Compact 2000 M ROV System Designed For Marine Research Operations From Smaller VesselsGabrielZamanNo ratings yet
- Autonomous Underwater Vehicles SeminarDocument15 pagesAutonomous Underwater Vehicles SeminarRupesh NairNo ratings yet
- Aquarius SAC-D Sea Surface Salinity From SpaceDocument12 pagesAquarius SAC-D Sea Surface Salinity From SpaceBob Andrepont100% (1)
- Variable Buoyancy Paper 04302317Document7 pagesVariable Buoyancy Paper 04302317an02023801No ratings yet
- Fan2015 PDFDocument5 pagesFan2015 PDFAbhishek DagadeNo ratings yet
- Manoeuvring Trials With The MUN Explorer AUV DataDocument9 pagesManoeuvring Trials With The MUN Explorer AUV DataTony K PaulNo ratings yet
- Development of An Autonomous Surface Vehicle and Performance Evalu-Ation of Autonomous Navigation TechnologiesDocument11 pagesDevelopment of An Autonomous Surface Vehicle and Performance Evalu-Ation of Autonomous Navigation TechnologiesLUIS ALBERTO SALAZAR CHAVEZNo ratings yet
- OC103 Lesson #3: Ocean Exploration in The Present and FutureDocument6 pagesOC103 Lesson #3: Ocean Exploration in The Present and Futuresdsads ssdsadNo ratings yet
- Chapt01 2Document14 pagesChapt01 2marcianitusNo ratings yet
- Project Quick Find: Memoirs of a U.S. Navy SEAL Training Sea LionsFrom EverandProject Quick Find: Memoirs of a U.S. Navy SEAL Training Sea LionsNo ratings yet
- Ocean life: expeditions and essays exploring the abyss: Ocean Life, #1From EverandOcean life: expeditions and essays exploring the abyss: Ocean Life, #1No ratings yet
- S 9.8C - Small Craft and Diving Operation PermitDocument1 pageS 9.8C - Small Craft and Diving Operation PermitWILLIAMNo ratings yet
- New Syllabus - Diploma in Shipping and Port ManagemntDocument7 pagesNew Syllabus - Diploma in Shipping and Port ManagemntMercyNo ratings yet
- Ngs 6.2 U2t Questionblank 62 2Document109 pagesNgs 6.2 U2t Questionblank 62 2glorialinNo ratings yet
- MJ 50Document27 pagesMJ 50Brandon HernandezNo ratings yet
- Aw 55-50 Gearbox Parts + ConvertersDocument6 pagesAw 55-50 Gearbox Parts + ConvertersArkadiusz CieślaNo ratings yet
- 25N MED 1550095 Mod B PDFDocument3 pages25N MED 1550095 Mod B PDFKhaing MinNo ratings yet
- Annex I (Definitions)Document22 pagesAnnex I (Definitions)riversgardenNo ratings yet
- QCT484 1999enDocument14 pagesQCT484 1999enlinh caca huynhNo ratings yet
- Сувениры из БританииDocument10 pagesСувениры из БританииТатьянаNo ratings yet
- Aps Deutz 30 Kva BrochureDocument2 pagesAps Deutz 30 Kva BrochureBungsu Bandung0% (1)
- Rte 822Document7 pagesRte 822Landaeta_1985No ratings yet
- CONTENTS Hyundai Excavator - R35Z 7 - Parts Catalog 280pagesDocument15 pagesCONTENTS Hyundai Excavator - R35Z 7 - Parts Catalog 280pagesKen LeeNo ratings yet
- TRUCKMATE 2013 Product CatalogDocument16 pagesTRUCKMATE 2013 Product CatalogHippie_Lovegod_7788No ratings yet
- Man Op D250RM-D300RM EN LR 14-11-V3Document50 pagesMan Op D250RM-D300RM EN LR 14-11-V3Nuke THe WhalesNo ratings yet
- Product Description:: Trailer Mounted Drill RigDocument2 pagesProduct Description:: Trailer Mounted Drill RigPAOLO SORDININo ratings yet
- The Feasibility of Transporting Hydrogen in Existing PipelinesDocument9 pagesThe Feasibility of Transporting Hydrogen in Existing PipelinesomiitgNo ratings yet
- LCA of Airfield Pavements - Tim SmithDocument53 pagesLCA of Airfield Pavements - Tim SmithalgassiNo ratings yet
- 01.FB511 Jan-01Document2 pages01.FB511 Jan-01Juliaman NapituNo ratings yet
- Annexure 1: Road Network Inventory SurveyDocument3 pagesAnnexure 1: Road Network Inventory SurveyAnkit SharmaNo ratings yet
- Course Overview Mining Machinery 17Document20 pagesCourse Overview Mining Machinery 17Abhijeet ShrivastavaNo ratings yet
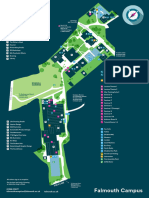
- Falmouth Campus MapDocument1 pageFalmouth Campus MapD DeeNo ratings yet
- Hydraulic Bow and Stern ThrustersDocument2 pagesHydraulic Bow and Stern ThrustersginanjarNo ratings yet
- PRODUCT CATALOGUE - PrecastDocument8 pagesPRODUCT CATALOGUE - PrecastUnited Construction Est. TechnicalNo ratings yet
- 2008 Legacy 600Document15 pages2008 Legacy 600LilianaVargasNo ratings yet
- Golsta - Southland Abidjan - Shop DWG LatestDocument47 pagesGolsta - Southland Abidjan - Shop DWG LatestSouleymane KoneNo ratings yet
- Department of Transport: Checkpost Tax E-ReceiptDocument1 pageDepartment of Transport: Checkpost Tax E-ReceiptShankar BanrwalNo ratings yet
- Toyota Land Cruiser 300 ZX ManualDocument599 pagesToyota Land Cruiser 300 ZX ManualNeutralGuyRSANo ratings yet




















































































You might also like
- Case 590L Backhoe: Replacement Parts CatalogDocument184 pagesCase 590L Backhoe: Replacement Parts CatalogCarla Mendez100% (1)
- Final Copy - Open Pipe Muffler 24mar2021 - With EsigDocument5 pagesFinal Copy - Open Pipe Muffler 24mar2021 - With EsigPoblacion Polomolok100% (2)
- Guía de Reemplazo de Partes para Vehículos JEEP 1987-2018Document572 pagesGuía de Reemplazo de Partes para Vehículos JEEP 1987-2018Gregor RojasNo ratings yet
- OceanxplorerspecsDocument16 pagesOceanxplorerspecssafsyahNo ratings yet
- What Can Rovs Do ?Document21 pagesWhat Can Rovs Do ?Ahmed SabryNo ratings yet
- Hdwe URintroDocument4 pagesHdwe URintroGabrielZamanNo ratings yet
- Design of A New Low Cost ROV VehicleDocument7 pagesDesign of A New Low Cost ROV VehiclePablys ZúñigaNo ratings yet
- Reson2010 McCue Yoerger 73430Document10 pagesReson2010 McCue Yoerger 73430Hieu Do TatNo ratings yet
- Hybrid ROV For 1,000 Meter OperationsDocument2 pagesHybrid ROV For 1,000 Meter OperationsTejo AlamNo ratings yet
- Design of A New Low Cost ROV VehicleDocument6 pagesDesign of A New Low Cost ROV VehicleMuhammad Yasar JavaidNo ratings yet
- Auv Fact SheetDocument1 pageAuv Fact SheetIbidhi EskanderNo ratings yet
- The Development and Ocean Testing of An AUV Docking Station For A 21 AUVDocument7 pagesThe Development and Ocean Testing of An AUV Docking Station For A 21 AUVDany PABON VILLAMIZARNo ratings yet
- Noaa 20729 DS1Document70 pagesNoaa 20729 DS1Dodo BabyNo ratings yet
- AUVDocument9 pagesAUVAhmed El-erakyNo ratings yet
- Keystone Range History ReportDocument115 pagesKeystone Range History Reportjsc7No ratings yet
- Assigment GSS411 Branches of Geomatics 2022977645Document13 pagesAssigment GSS411 Branches of Geomatics 2022977645MUHAMMAD NADZIF SAHIMINo ratings yet
- Cent Rode MasaDocument11 pagesCent Rode Masamarcelo carroNo ratings yet
- What Is ROVDocument2 pagesWhat Is ROVFhrenz Niño MagonciaNo ratings yet
- Autonomous Underwater VehicleDocument6 pagesAutonomous Underwater VehicleKiran Kumar50% (2)
- Autonomous Underwater VehicleDocument5 pagesAutonomous Underwater VehicleBiswajit PadhiNo ratings yet
- Assignment - No. 5 - Remote Operated Vehicle - (32,46,54)Document14 pagesAssignment - No. 5 - Remote Operated Vehicle - (32,46,54)jaipatelNo ratings yet
- 潜航器设计回顾Document62 pages潜航器设计回顾朱鹏飞No ratings yet
- K-Hive: Moritz Mayr - Semester ProjectDocument20 pagesK-Hive: Moritz Mayr - Semester ProjectMomonga TheGreatNo ratings yet
- Vehiculo Espacial SEV Concept FactSheetDocument4 pagesVehiculo Espacial SEV Concept FactSheetDilan Loaiza TapieroNo ratings yet
- ROV StudyDocument4 pagesROV StudyKingsley Ezenwaka100% (1)
- Otc 21515Document9 pagesOtc 21515Rasheed YusufNo ratings yet
- LECTURE No.2: Research Vessel - What Are They?Document9 pagesLECTURE No.2: Research Vessel - What Are They?Miruna ClinciuNo ratings yet
- NASA Facts From Landing To Launch Orbiter ProcessingDocument8 pagesNASA Facts From Landing To Launch Orbiter ProcessingBob AndrepontNo ratings yet
- NASA 167413main KodiakstarDocument2 pagesNASA 167413main KodiakstarNASAdocumentsNo ratings yet
- What Is An RovDocument32 pagesWhat Is An RovkasminahNo ratings yet
- Space Exploration Vehicle Concept: BackgroundDocument4 pagesSpace Exploration Vehicle Concept: BackgroundDiego Ernesto Mendivel SupoNo ratings yet
- MODULE 4 5 Nav Watch 2Document8 pagesMODULE 4 5 Nav Watch 2Faith MagluyanNo ratings yet
- O C E A N: Watching in 3DDocument16 pagesO C E A N: Watching in 3Dlelo2k3No ratings yet
- Design and Control of Autonomous Underwater Robots: A SurveyDocument18 pagesDesign and Control of Autonomous Underwater Robots: A SurveyKoushik Ch 19BME1186No ratings yet
- 2004-02-18 Stevns Power AHV AccidentDocument17 pages2004-02-18 Stevns Power AHV AccidentriggertroyNo ratings yet
- Go Fast WakesDocument6 pagesGo Fast WakesISAI LABORIEN ROMAN RUELASNo ratings yet
- (Tom2013) Topography 3D SeafloorDocument9 pages(Tom2013) Topography 3D SeafloorMiguel Angel Luque NietoNo ratings yet
- Navy Launches UAV From Submerged Submarine - Spectra 2014Document2 pagesNavy Launches UAV From Submerged Submarine - Spectra 2014U.S. Naval Research LaboratoryNo ratings yet
- NTSB Report On Seacor Power CapsizingDocument7 pagesNTSB Report On Seacor Power CapsizingThe Courier and Daily CometNo ratings yet
- SEACOR Power SRC Board Meeting SummaryDocument7 pagesSEACOR Power SRC Board Meeting SummaryAmanda JohnsonNo ratings yet
- Exploring Underwater RobotsDocument8 pagesExploring Underwater Robotspavankawade63No ratings yet
- 2.00AJ / 16.00AJ Exploring Sea, Space, & Earth: Fundamentals of Engineering DesignDocument10 pages2.00AJ / 16.00AJ Exploring Sea, Space, & Earth: Fundamentals of Engineering DesignL11r1No ratings yet
- Clubnews Vol 1 No-2Document4 pagesClubnews Vol 1 No-2lulalala8888No ratings yet
- Observation RovsDocument4 pagesObservation Rovscharles IkeNo ratings yet
- Aquarius User Manual: Florida International University (FIU)Document11 pagesAquarius User Manual: Florida International University (FIU)Divers Dream PrahaNo ratings yet
- Irjet V4i9125Document7 pagesIrjet V4i9125henyNo ratings yet
- Recovery of The GSLV Debris From The Shallow Waters of The Bay of Bengal, Off Sriharikota, Andhra Pradesh, IndiaDocument6 pagesRecovery of The GSLV Debris From The Shallow Waters of The Bay of Bengal, Off Sriharikota, Andhra Pradesh, IndiaRavi KiranNo ratings yet
- The Coast Guard at WarDocument149 pagesThe Coast Guard at WarLORANBillNo ratings yet
- English EssayDocument15 pagesEnglish Essayapi-462219695No ratings yet
- MARUM-Squid - A Powerful Yet Compact 2000 M ROV System Designed For Marine Research Operations From Smaller VesselsDocument4 pagesMARUM-Squid - A Powerful Yet Compact 2000 M ROV System Designed For Marine Research Operations From Smaller VesselsGabrielZamanNo ratings yet
- Autonomous Underwater Vehicles SeminarDocument15 pagesAutonomous Underwater Vehicles SeminarRupesh NairNo ratings yet
- Aquarius SAC-D Sea Surface Salinity From SpaceDocument12 pagesAquarius SAC-D Sea Surface Salinity From SpaceBob Andrepont100% (1)
- Variable Buoyancy Paper 04302317Document7 pagesVariable Buoyancy Paper 04302317an02023801No ratings yet
- Fan2015 PDFDocument5 pagesFan2015 PDFAbhishek DagadeNo ratings yet
- Manoeuvring Trials With The MUN Explorer AUV DataDocument9 pagesManoeuvring Trials With The MUN Explorer AUV DataTony K PaulNo ratings yet
- Development of An Autonomous Surface Vehicle and Performance Evalu-Ation of Autonomous Navigation TechnologiesDocument11 pagesDevelopment of An Autonomous Surface Vehicle and Performance Evalu-Ation of Autonomous Navigation TechnologiesLUIS ALBERTO SALAZAR CHAVEZNo ratings yet
- OC103 Lesson #3: Ocean Exploration in The Present and FutureDocument6 pagesOC103 Lesson #3: Ocean Exploration in The Present and Futuresdsads ssdsadNo ratings yet
- Chapt01 2Document14 pagesChapt01 2marcianitusNo ratings yet
- Project Quick Find: Memoirs of a U.S. Navy SEAL Training Sea LionsFrom EverandProject Quick Find: Memoirs of a U.S. Navy SEAL Training Sea LionsNo ratings yet
- Ocean life: expeditions and essays exploring the abyss: Ocean Life, #1From EverandOcean life: expeditions and essays exploring the abyss: Ocean Life, #1No ratings yet
- S 9.8C - Small Craft and Diving Operation PermitDocument1 pageS 9.8C - Small Craft and Diving Operation PermitWILLIAMNo ratings yet
- New Syllabus - Diploma in Shipping and Port ManagemntDocument7 pagesNew Syllabus - Diploma in Shipping and Port ManagemntMercyNo ratings yet
- Ngs 6.2 U2t Questionblank 62 2Document109 pagesNgs 6.2 U2t Questionblank 62 2glorialinNo ratings yet
- MJ 50Document27 pagesMJ 50Brandon HernandezNo ratings yet
- Aw 55-50 Gearbox Parts + ConvertersDocument6 pagesAw 55-50 Gearbox Parts + ConvertersArkadiusz CieślaNo ratings yet
- 25N MED 1550095 Mod B PDFDocument3 pages25N MED 1550095 Mod B PDFKhaing MinNo ratings yet
- Annex I (Definitions)Document22 pagesAnnex I (Definitions)riversgardenNo ratings yet
- QCT484 1999enDocument14 pagesQCT484 1999enlinh caca huynhNo ratings yet
- Сувениры из БританииDocument10 pagesСувениры из БританииТатьянаNo ratings yet
- Aps Deutz 30 Kva BrochureDocument2 pagesAps Deutz 30 Kva BrochureBungsu Bandung0% (1)
- Rte 822Document7 pagesRte 822Landaeta_1985No ratings yet
- CONTENTS Hyundai Excavator - R35Z 7 - Parts Catalog 280pagesDocument15 pagesCONTENTS Hyundai Excavator - R35Z 7 - Parts Catalog 280pagesKen LeeNo ratings yet
- TRUCKMATE 2013 Product CatalogDocument16 pagesTRUCKMATE 2013 Product CatalogHippie_Lovegod_7788No ratings yet
- Man Op D250RM-D300RM EN LR 14-11-V3Document50 pagesMan Op D250RM-D300RM EN LR 14-11-V3Nuke THe WhalesNo ratings yet
- Product Description:: Trailer Mounted Drill RigDocument2 pagesProduct Description:: Trailer Mounted Drill RigPAOLO SORDININo ratings yet
- The Feasibility of Transporting Hydrogen in Existing PipelinesDocument9 pagesThe Feasibility of Transporting Hydrogen in Existing PipelinesomiitgNo ratings yet
- LCA of Airfield Pavements - Tim SmithDocument53 pagesLCA of Airfield Pavements - Tim SmithalgassiNo ratings yet
- 01.FB511 Jan-01Document2 pages01.FB511 Jan-01Juliaman NapituNo ratings yet
- Annexure 1: Road Network Inventory SurveyDocument3 pagesAnnexure 1: Road Network Inventory SurveyAnkit SharmaNo ratings yet
- Course Overview Mining Machinery 17Document20 pagesCourse Overview Mining Machinery 17Abhijeet ShrivastavaNo ratings yet
- Falmouth Campus MapDocument1 pageFalmouth Campus MapD DeeNo ratings yet
- Hydraulic Bow and Stern ThrustersDocument2 pagesHydraulic Bow and Stern ThrustersginanjarNo ratings yet
- PRODUCT CATALOGUE - PrecastDocument8 pagesPRODUCT CATALOGUE - PrecastUnited Construction Est. TechnicalNo ratings yet
- 2008 Legacy 600Document15 pages2008 Legacy 600LilianaVargasNo ratings yet
- Golsta - Southland Abidjan - Shop DWG LatestDocument47 pagesGolsta - Southland Abidjan - Shop DWG LatestSouleymane KoneNo ratings yet
- Department of Transport: Checkpost Tax E-ReceiptDocument1 pageDepartment of Transport: Checkpost Tax E-ReceiptShankar BanrwalNo ratings yet
- Toyota Land Cruiser 300 ZX ManualDocument599 pagesToyota Land Cruiser 300 ZX ManualNeutralGuyRSANo ratings yet