100% found this document useful (4 votes)
4K views16 pagesHomomorphic Filtering for Image Enhancement
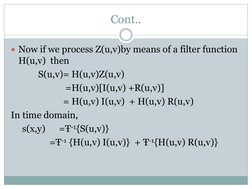
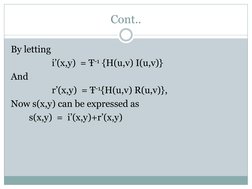
Homomorphic filtering is a frequency domain technique that enhances reflectance properties while compressing brightness in images. It models digital images as the product of an illumination component and reflectance component. Taking the logarithm of the image separates these into addition in the frequency domain. A filter then enhances reflectance frequencies while compressing illumination frequencies. The inverse transform of the filtered result yields an image with increased contrast and sharper reflectance details while compressing brightness changes from lighting. Homomorphic filtering is useful for enhancing images affected by uneven lighting.
Uploaded by
K.R.RaguramCopyright
© Attribution Non-Commercial (BY-NC)
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPT, PDF, TXT or read online on Scribd
100% found this document useful (4 votes)
4K views16 pagesHomomorphic Filtering for Image Enhancement
Homomorphic filtering is a frequency domain technique that enhances reflectance properties while compressing brightness in images. It models digital images as the product of an illumination component and reflectance component. Taking the logarithm of the image separates these into addition in the frequency domain. A filter then enhances reflectance frequencies while compressing illumination frequencies. The inverse transform of the filtered result yields an image with increased contrast and sharper reflectance details while compressing brightness changes from lighting. Homomorphic filtering is useful for enhancing images affected by uneven lighting.
Uploaded by
K.R.RaguramCopyright
© Attribution Non-Commercial (BY-NC)
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPT, PDF, TXT or read online on Scribd
- Introduction
- Derivation
- Process Description
- Example & Applications