You might also like
- LIN protocol: A cost-effective alternative to CANDocument5 pagesLIN protocol: A cost-effective alternative to CANDinesh Reddy VootkuriNo ratings yet
- The CAN BusDocument3 pagesThe CAN BusaknabcdNo ratings yet
- AVR308: Software LIN Slave: 8-Bit Microcontroller Application NoteDocument12 pagesAVR308: Software LIN Slave: 8-Bit Microcontroller Application NoteEQS Venture BuilderNo ratings yet
- Chapter 6Document21 pagesChapter 6shadi22No ratings yet
- Automotive Interview QuestionsDocument65 pagesAutomotive Interview QuestionsNirav DesaiNo ratings yet
- Theory: CAN-Bus: 1 General InformationDocument7 pagesTheory: CAN-Bus: 1 General InformationDileep Kumar100% (1)
- Error Detection, Correction and Wireless CommunicationDocument75 pagesError Detection, Correction and Wireless CommunicationManofwarriorNo ratings yet
- CAN TutorialDocument22 pagesCAN TutorialNaveen BasavarajacharNo ratings yet
- CAN TutorialDocument22 pagesCAN TutorialApoorva BhattNo ratings yet
- Physical Addressing - Error Handling PDFDocument14 pagesPhysical Addressing - Error Handling PDFGopal AgarwalNo ratings yet
- mcp2515 Avr Can Spi PDFDocument31 pagesmcp2515 Avr Can Spi PDFcaubiosNo ratings yet
- CAN - A Brief Tutorial: Nuts and BoltsDocument4 pagesCAN - A Brief Tutorial: Nuts and Boltsmailtomyidyaar98100% (1)
- Ethernet Chapter: Protocols, Addressing, and SwitchingDocument16 pagesEthernet Chapter: Protocols, Addressing, and SwitchingRafael SilveraNo ratings yet
- Controller Area Network (CAN) Information, Working and AdvantagesDocument5 pagesController Area Network (CAN) Information, Working and AdvantagesAbhijeet KeshriNo ratings yet
- 1.A. Sonet Frame 1.B. Atm Cell 1.C. Ip Packet 1.D. Fiber Channel FrameDocument17 pages1.A. Sonet Frame 1.B. Atm Cell 1.C. Ip Packet 1.D. Fiber Channel Frameరాహుల్ దేవ్No ratings yet
- Automotive BasicsDocument72 pagesAutomotive BasicsArunkumar100% (1)
- Welcome To Industrial Training Institute: Controller Area NetworkDocument47 pagesWelcome To Industrial Training Institute: Controller Area NetworkNiza Jamil100% (1)
- FM Tranciever AppsDocument7 pagesFM Tranciever Appsinsomnium86No ratings yet
- Unit I Frame Relay NetworksDocument95 pagesUnit I Frame Relay NetworksBhuvaneswari ManikandanNo ratings yet
- ES 2023 L7b Embedded System Interfacing Serial IO LIN Bus Lecture 8Document16 pagesES 2023 L7b Embedded System Interfacing Serial IO LIN Bus Lecture 8Samkelo MavimbelaNo ratings yet
- UNIT IV EmbeddedDocument16 pagesUNIT IV EmbeddedeswaranNo ratings yet
- 802.4 Token Bus LAN TCP/IP PortingDocument6 pages802.4 Token Bus LAN TCP/IP Portingkaushik4endNo ratings yet
- Can & MCP2515Document31 pagesCan & MCP2515Ovidiu CiobanuNo ratings yet
- Lin BusDocument25 pagesLin BusKishor ShiyaniNo ratings yet
- CS20601 NotesDocument101 pagesCS20601 Notesroshin_sharoNo ratings yet
- CAN Bus - Wikipedia, The Free EncyclopediaDocument16 pagesCAN Bus - Wikipedia, The Free EncyclopediaRakesh S K100% (1)
- Unit 2 - Data Communication - WWW - Rgpvnotes.inDocument18 pagesUnit 2 - Data Communication - WWW - Rgpvnotes.inSonu KushwahaNo ratings yet
- Data Comm & Networking I Its Evening: Physical Layer . Sub-TopicsDocument9 pagesData Comm & Networking I Its Evening: Physical Layer . Sub-TopicssemakulaNo ratings yet
- Unit - IDocument21 pagesUnit - IshanmugasundaramNo ratings yet
- Interview Questions-1Document41 pagesInterview Questions-1ChaitanyaBv100% (2)
- The Link Layer and Local Area Networks: Department of ITDocument96 pagesThe Link Layer and Local Area Networks: Department of ITkomalapcNo ratings yet
- Vehicle CAN Bus Standard ExplainedDocument8 pagesVehicle CAN Bus Standard ExplainedMohammad FaizalNo ratings yet
- How I2C WorksDocument9 pagesHow I2C WorksKshitij GurjarNo ratings yet
- Controller Area Network (CAN) - An IntroductionDocument4 pagesController Area Network (CAN) - An IntroductionAishwaryaNo ratings yet
- I2c PDFDocument14 pagesI2c PDFJALEELA_CNo ratings yet
- LAN Topologies and Media Access ControlDocument35 pagesLAN Topologies and Media Access ControlRudren Eswaran KrishnanNo ratings yet
- AI Exp 7Document7 pagesAI Exp 7akash kurheNo ratings yet
- In-Vehicle Networking Classification and ProtocolsDocument50 pagesIn-Vehicle Networking Classification and ProtocolsMohamed ElgeziryNo ratings yet
- Es 2Document31 pagesEs 2sanjay.sampath.kNo ratings yet
- Controller Area Network Communication for Vehicle ElectronicsDocument30 pagesController Area Network Communication for Vehicle Electronicsjyothi bagewadiNo ratings yet
- IndexDocument9 pagesIndexR_K_DhandaNo ratings yet
- Computer Solutions LTD: CAN - A Brief TutorialDocument7 pagesComputer Solutions LTD: CAN - A Brief Tutorialhitech_emi3591No ratings yet
- Can Interview Questions: 1. What Is CAN? Answer: 1. CAN Is A Multi Master Broadcast Serial Bus Standard For Connecting Electronic ControlDocument59 pagesCan Interview Questions: 1. What Is CAN? Answer: 1. CAN Is A Multi Master Broadcast Serial Bus Standard For Connecting Electronic Controlboobalkrishnan2576No ratings yet
- IEEE 802 Ethernet Frame and Token Bus & Ring StandardsDocument4 pagesIEEE 802 Ethernet Frame and Token Bus & Ring StandardsSwapnil Sunil ShendageNo ratings yet
- Troubleshooting IBM: Internetworking Troubleshooting Handbook, Second Edition 1-58705-005-6Document54 pagesTroubleshooting IBM: Internetworking Troubleshooting Handbook, Second Edition 1-58705-005-6Fahim Hyder SayedNo ratings yet
- Automotive Interview QuestionsDocument61 pagesAutomotive Interview Questionskrajasekarantuti50% (2)
- UNIT 2 CNDocument35 pagesUNIT 2 CNmsk.official321No ratings yet
- Data Link Layer ServicesDocument103 pagesData Link Layer ServicesSCI HUBNo ratings yet
- Automotive BasicsDocument62 pagesAutomotive BasicsSheshanth AmbekarNo ratings yet
- Wireless Ethernet (IEEE 802.11) &bluetooth: by Qusay ShihabDocument26 pagesWireless Ethernet (IEEE 802.11) &bluetooth: by Qusay Shihabengitq6805No ratings yet
- T1/E1/PRI Technology Overview: Connections, Frames & SignalingDocument44 pagesT1/E1/PRI Technology Overview: Connections, Frames & SignalingEl-Hussein HegazyNo ratings yet
- LAN and Ethernet Basics - Deepak George: OSI Network LayersDocument12 pagesLAN and Ethernet Basics - Deepak George: OSI Network LayersUseful Videos DevotionalNo ratings yet
- Can Interview Questions: 1. What Is CAN and Its Uses? Answer: 1. CAN Is A Multi-Master Broadcast Serial Bus Standard ForDocument90 pagesCan Interview Questions: 1. What Is CAN and Its Uses? Answer: 1. CAN Is A Multi-Master Broadcast Serial Bus Standard ForsidduNo ratings yet
- PPT Week 5Document59 pagesPPT Week 5GERALDUS BERNICKO CLIFF HARSONONo ratings yet
- Data Link LayerDocument33 pagesData Link Layerwinster21augNo ratings yet
- IDC Slides 1Document30 pagesIDC Slides 1Rahul EkhandeNo ratings yet
- CAN Protocol: A Guide to Controller Area Network CommunicationsDocument7 pagesCAN Protocol: A Guide to Controller Area Network Communicationssrc e-solutionsNo ratings yet
- Serial Port Complete: COM Ports, USB Virtual COM Ports, and Ports for Embedded SystemsFrom EverandSerial Port Complete: COM Ports, USB Virtual COM Ports, and Ports for Embedded SystemsRating: 3.5 out of 5 stars3.5/5 (9)
- Capitulo 5Document35 pagesCapitulo 5ynot666No ratings yet
- Cap 4Document10 pagesCap 4ynot666No ratings yet
- Think CSeifDocument226 pagesThink CSeifserjah1No ratings yet
- Capitulo 5Document35 pagesCapitulo 5ynot666No ratings yet
- Capitulo 5Document35 pagesCapitulo 5ynot666No ratings yet
- Cap 3Document25 pagesCap 3ynot666No ratings yet
- Cap 2Document16 pagesCap 2ynot666No ratings yet
- Practica DNSDocument2 pagesPractica DNSynot666No ratings yet
- Reference Models OSI - ITESODocument29 pagesReference Models OSI - ITESOynot666No ratings yet
- LAB 2: Multiple Endpoints: - This LAB Will Exercise The Following Points/knowledgeDocument2 pagesLAB 2: Multiple Endpoints: - This LAB Will Exercise The Following Points/knowledgeynot666No ratings yet
- OSI PaperDocument8 pagesOSI Paperynot666No ratings yet
- WirelessNetworksEmbeddedSystems ZigBee Clase3Document29 pagesWirelessNetworksEmbeddedSystems ZigBee Clase3ynot666No ratings yet
- The OpenR2 Guide - Installation and ConfigurationDocument11 pagesThe OpenR2 Guide - Installation and Configurationynot666No ratings yet
- Android Sesion 1Document26 pagesAndroid Sesion 1ynot666No ratings yet
- In-Vehicle Networking Technology For 2010 and Beyond: Published 04/12/2010Document13 pagesIn-Vehicle Networking Technology For 2010 and Beyond: Published 04/12/2010Dasari DeepikaNo ratings yet
- ZigBee FinalProjectsDocument7 pagesZigBee FinalProjectsynot666No ratings yet
- CAN Specification Version 2 BOSCHDocument73 pagesCAN Specification Version 2 BOSCHdigitales100% (4)
- Grammar BookDocument144 pagesGrammar BookNino Bluashvili100% (8)
- Technical Bulletin 0666 - Upgrading From SIP 5 0 To DGW 2 0Document23 pagesTechnical Bulletin 0666 - Upgrading From SIP 5 0 To DGW 2 0ynot666No ratings yet
- Can - ItesoDocument109 pagesCan - Itesoynot666No ratings yet
- Configuration Notes 0296 Mediatrix 3000 With AsteriskDocument16 pagesConfiguration Notes 0296 Mediatrix 3000 With Asteriskynot666No ratings yet
- How To Setup KTA3100 For VOIP Connections WebDocument7 pagesHow To Setup KTA3100 For VOIP Connections Webynot666No ratings yet
- How To Setup KTA3100 For VOIP Connections WebDocument7 pagesHow To Setup KTA3100 For VOIP Connections Webynot666No ratings yet
- SQL TutDocument1 pageSQL Tutynot666No ratings yet
- Building Your Own IP PBXDocument15 pagesBuilding Your Own IP PBXynot666No ratings yet
- Tux Linux AsciiDocument1 pageTux Linux Asciiynot666No ratings yet
- Video 2 BrainDocument32 pagesVideo 2 Brainynot666No ratings yet
- Templates Mediatrix 3000 SeriesDocument6 pagesTemplates Mediatrix 3000 Seriesynot666No ratings yet
- Ccna Bootcamp: Wide Area Networks (Wans)Document8 pagesCcna Bootcamp: Wide Area Networks (Wans)ynot666No ratings yet
- The Delta-Sigma Modulator: A Circuit For All SeasonsDocument6 pagesThe Delta-Sigma Modulator: A Circuit For All SeasonsSohaib AkhtarNo ratings yet
- Automatic Transmission System SeminarDocument14 pagesAutomatic Transmission System SeminarAnonymous 2YgIckU0No ratings yet
- Study Guide Rev08242018Document188 pagesStudy Guide Rev08242018chong pak limNo ratings yet
- English For Academic and Professional Purposes: Quarter 1 - Module 3Document9 pagesEnglish For Academic and Professional Purposes: Quarter 1 - Module 3John Vincent Salmasan100% (5)
- Power Converters Simulation Lab Manual - (2015-2016)Document41 pagesPower Converters Simulation Lab Manual - (2015-2016)Leela KrishnaNo ratings yet
- Australia vs. France ReportDocument5 pagesAustralia vs. France ReportammeNo ratings yet
- Harvard Algorithms cs124 NotesDocument6 pagesHarvard Algorithms cs124 NotesYamini DasguptaNo ratings yet
- Digital Transducers: Group 3Document76 pagesDigital Transducers: Group 3Jasmine RaiNo ratings yet
- Cost Acctg. Problems 1Document8 pagesCost Acctg. Problems 1Cheese ButterNo ratings yet
- Palacio VsDocument2 pagesPalacio VsRaymart SalamidaNo ratings yet
- Microsoft v. TomTom ComplaintDocument10 pagesMicrosoft v. TomTom ComplaintcoderightsNo ratings yet
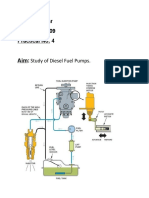
- Study of Diesel Fuel Pumps ComponentsDocument6 pagesStudy of Diesel Fuel Pumps ComponentsPro GamerssNo ratings yet
- MD Anderson Medical Oncology 4th Edition 2022Document1,694 pagesMD Anderson Medical Oncology 4th Edition 2022Iskandar414100% (6)
- Class 11 Accountancy Part 2Document288 pagesClass 11 Accountancy Part 2Pyngs Ronra ShimrayNo ratings yet
- Consumer Behaviour 1Document11 pagesConsumer Behaviour 1Rushika ShahNo ratings yet
- Viewing Partition of India as an Imperfect SolutionDocument36 pagesViewing Partition of India as an Imperfect Solutionsingh1910511753No ratings yet
- Types of FoundationDocument28 pagesTypes of FoundationraniepaulNo ratings yet
- VLSI Design Course PlanDocument2 pagesVLSI Design Course PlanJunaid RajputNo ratings yet
- Mobile Banking Prospects Problems BangladeshDocument20 pagesMobile Banking Prospects Problems BangladeshabrarNo ratings yet
- Catwalk Walk Base Plate Grouting 1Document30 pagesCatwalk Walk Base Plate Grouting 1MdShahbazAhmedNo ratings yet
- Topology Optimization of Automotive Brake PedalDocument5 pagesTopology Optimization of Automotive Brake PedalNizam Sudin Dan KhatijahNo ratings yet
- BABOK V3 10. Glossary PDFDocument16 pagesBABOK V3 10. Glossary PDFAakash ChhibberNo ratings yet
- Bachelor of Computer Applications: Pondicherry UniversityDocument49 pagesBachelor of Computer Applications: Pondicherry Universitybalaanand_mcaNo ratings yet
- Board Resolution for Execution of Sale DeedDocument3 pagesBoard Resolution for Execution of Sale DeedRizwan GhafoorNo ratings yet
- PFRS SGV PDFDocument18 pagesPFRS SGV PDFJonathan Javier GajeNo ratings yet
- 78ac PDFDocument7 pages78ac PDFvhgiaoNo ratings yet
- Men S Health South Africa - March 2017 PDFDocument132 pagesMen S Health South Africa - March 2017 PDFAbimaelGomesNo ratings yet
- Scarola Motion Hague Convention RequestDocument14 pagesScarola Motion Hague Convention RequestPaulWolfNo ratings yet
- Colonial Comparison Powerpoint TemplateDocument10 pagesColonial Comparison Powerpoint TemplateGraham NicholsNo ratings yet
- 410 09e Checkliste For Assessment 13485 MDDDocument51 pages410 09e Checkliste For Assessment 13485 MDDeko Setyawan100% (1)