You might also like
- Mobile Wireless Communications 1st Edition Schwartz Solutions ManualDocument22 pagesMobile Wireless Communications 1st Edition Schwartz Solutions Manualwerkeobdure2xubjj100% (19)
- Browning Mark 3 Owners ManualDocument18 pagesBrowning Mark 3 Owners Manualcsr85024No ratings yet
- Project PDF FinalDocument21 pagesProject PDF Finalramratanec100% (1)
- Pulse Modulation and Multiplexing Techniques PDFDocument58 pagesPulse Modulation and Multiplexing Techniques PDFamrutha ammuNo ratings yet
- Bulkhead Module (32A Module) : LocationDocument8 pagesBulkhead Module (32A Module) : LocationInjeletro Diesel100% (2)
- Unit 2: Pulse ModulationDocument55 pagesUnit 2: Pulse ModulationKeertanaNo ratings yet
- Sampling Theoram: Fs 2fmDocument47 pagesSampling Theoram: Fs 2fmarpita.vsNo ratings yet
- PTM, PWM, PPM, PCMDocument37 pagesPTM, PWM, PPM, PCMTarunNo ratings yet
- Pulse ModulationDocument5 pagesPulse ModulationsivaperumalNo ratings yet
- Analog Pulse Modulation: Prof. Umesh Yadava Department of Physics DDU Gorakhpur University GorakhpurDocument15 pagesAnalog Pulse Modulation: Prof. Umesh Yadava Department of Physics DDU Gorakhpur University GorakhpurSahil SrivastavaNo ratings yet
- Modulacion-Demodulacion-Medios de Transmision y NormatividadDocument5 pagesModulacion-Demodulacion-Medios de Transmision y NormatividadOziel RivasNo ratings yet
- Pulse Amplitude ModulationDocument3 pagesPulse Amplitude ModulationKelly GalvEz0% (1)
- 22 PulseModulationDocument31 pages22 PulseModulationMohamed shabanaNo ratings yet
- AC ReportDocument19 pagesAC ReportshriyaNo ratings yet
- Digital Modulation TechniquesDocument34 pagesDigital Modulation TechniquesAkash ModiNo ratings yet
- Lec4-Purpose and Types of ModulationDocument13 pagesLec4-Purpose and Types of ModulationWrudra RahmanNo ratings yet
- Unit 3Document63 pagesUnit 3CHANDRAKANT TRIPATHI (RA2011053010028)No ratings yet
- Pulse Modulation: DR Kumbirayi NyachionjekaDocument34 pagesPulse Modulation: DR Kumbirayi NyachionjekaFrancNo ratings yet
- Experiment No. - 2: ObjectDocument9 pagesExperiment No. - 2: ObjectGaurav Kumar GoyalNo ratings yet
- 1.fundamental Concepts of Digital Communications - Part1of2Document136 pages1.fundamental Concepts of Digital Communications - Part1of2Gianne ObusanNo ratings yet
- Communication Engineering Unit 4 Lecture 1Document28 pagesCommunication Engineering Unit 4 Lecture 1Deepak SinghNo ratings yet
- Unit V Pulse Modulation PDFDocument20 pagesUnit V Pulse Modulation PDFAK 1No ratings yet
- Notes Digital TransmissionDocument4 pagesNotes Digital TransmissionMohammad Noufil SiddiquiNo ratings yet
- 3.reporte de ModulacionDocument5 pages3.reporte de ModulacionFernando OchoaNo ratings yet
- Lê Nguyễn Thái Hà 17ECE Homework 1 2 3Document26 pagesLê Nguyễn Thái Hà 17ECE Homework 1 2 3Bin BinNo ratings yet
- Modulation: Presented By-Nidhi Baranwal Mca 6 SemDocument30 pagesModulation: Presented By-Nidhi Baranwal Mca 6 SemDr. M. Karthigai Pandian Asso Prof ICENo ratings yet
- ModulationDocument41 pagesModulationNimma Avanthi100% (1)
- Comm. CHAPTER 5 Pulse ModulationDocument25 pagesComm. CHAPTER 5 Pulse ModulationAbdi JoteNo ratings yet
- How Pulse Position Works: ModulationDocument5 pagesHow Pulse Position Works: Modulationhung13579No ratings yet
- Intro To DigiCom IIDocument81 pagesIntro To DigiCom IIAnonymous FKMfvCbNo ratings yet
- 05 Digital ModulationDocument41 pages05 Digital ModulationascxxigamingNo ratings yet
- PULSEDocument6 pagesPULSESuresh JKNo ratings yet
- ADC Module 3 FinalDocument44 pagesADC Module 3 FinalAnkit KumarNo ratings yet
- DC Unit-4 Part 1 For CeDocument20 pagesDC Unit-4 Part 1 For Cem.srinivasa raoNo ratings yet
- Difference Between PAMDocument17 pagesDifference Between PAMultra dubsNo ratings yet
- Difference Between PAMDocument17 pagesDifference Between PAMultra dubsNo ratings yet
- CH 4 1Document47 pagesCH 4 1elias asefaNo ratings yet
- PDC PPTDocument21 pagesPDC PPTAnkit KumarNo ratings yet
- Modulation Techniques in Wireless Systems - ComtionDocument15 pagesModulation Techniques in Wireless Systems - Comtionjoby josephNo ratings yet
- Unit 1Document50 pagesUnit 1Sanjaikumar KNo ratings yet
- Analog Communication Systems Lab: Experiment-1 Amplitude Modulation GenerationDocument16 pagesAnalog Communication Systems Lab: Experiment-1 Amplitude Modulation GenerationFmeNo ratings yet
- Unit Ii MCDocument17 pagesUnit Ii MCPrecious MposaNo ratings yet
- PPM Pulse-Position ModulationDocument2 pagesPPM Pulse-Position ModulationfiraszekiNo ratings yet
- Experiment No: 1 Modulation and Demodulation of PAM, PWM, PPM AimDocument5 pagesExperiment No: 1 Modulation and Demodulation of PAM, PWM, PPM AimJose DahlsonNo ratings yet
- Pulse Modulation: UNIT-6Document49 pagesPulse Modulation: UNIT-6NaliniNo ratings yet
- AM, PM and FM ModulationDocument18 pagesAM, PM and FM ModulationMithun Josh MJNo ratings yet
- Iare-Dc 444Document164 pagesIare-Dc 444Pandu KNo ratings yet
- Pulse - Modulation Introduction and Advantages ApplicationsDocument11 pagesPulse - Modulation Introduction and Advantages ApplicationsSree MedhaNo ratings yet
- AM Transmission System: Emer Paolo Sidamon Christian Dave SantosDocument45 pagesAM Transmission System: Emer Paolo Sidamon Christian Dave SantosBenedict LumabiNo ratings yet
- Pulse Width Modulation With Using DC Fan & Pulse Genertor: Prepared byDocument12 pagesPulse Width Modulation With Using DC Fan & Pulse Genertor: Prepared byBaby SamNo ratings yet
- Digital Modulation TechDocument63 pagesDigital Modulation Techgaurav_juneja_4No ratings yet
- Communication TechniqueDocument8 pagesCommunication TechniqueRavi ShankarNo ratings yet
- UNIT 3 Onemarks Eng Prot CeDocument4 pagesUNIT 3 Onemarks Eng Prot CeSukesh RNo ratings yet
- Ac Lab VivaDocument12 pagesAc Lab Vivara1No ratings yet
- Digicom 101Document100 pagesDigicom 101admerNo ratings yet
- Chapter 5Document110 pagesChapter 5Aravind TallaNo ratings yet
- Pulse ModulationDocument61 pagesPulse ModulationAmitDwivediNo ratings yet
- Amplitude Modulation: - Introduction To Modulation: - Detection of AM Signals: - Costas ReceiverDocument62 pagesAmplitude Modulation: - Introduction To Modulation: - Detection of AM Signals: - Costas ReceiverShikhar AgarwalNo ratings yet
- Channel DistortionDocument3 pagesChannel DistortionBlessonThomasNo ratings yet
- Pulse Modulation (PCM, PWM, Communiation)Document9 pagesPulse Modulation (PCM, PWM, Communiation)chetanajitesh76No ratings yet
- 4 - EE Com 314Document43 pages4 - EE Com 314jorgenovachrolloNo ratings yet
- Pulse-Width Modulation PDFDocument8 pagesPulse-Width Modulation PDFSindhuja ThogaruNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Scheme of Evaluation PDFDocument3 pagesScheme of Evaluation PDFlakkepoguNo ratings yet
- 2 Radar Systems SyllabusDocument1 page2 Radar Systems SyllabuslakkepoguNo ratings yet
- 3.5 Applications of CW RadarsDocument13 pages3.5 Applications of CW Radars2121x3ssssssssssNo ratings yet
- Lica Assignment 2 PDFDocument1 pageLica Assignment 2 PDFlakkepoguNo ratings yet
- Continuous Wave and Frequency Modulated Radar: 3.1 The Doppler EffectDocument14 pagesContinuous Wave and Frequency Modulated Radar: 3.1 The Doppler Effect2121x3ssssssssssNo ratings yet
- LICA I Mid Question PaperDocument2 pagesLICA I Mid Question PaperlakkepoguNo ratings yet
- RadioTech 30.01.14 HowardBenn - Samsung PDFDocument25 pagesRadioTech 30.01.14 HowardBenn - Samsung PDFlakkepoguNo ratings yet
- Madanpalle 1Document1 pageMadanpalle 1lakkepoguNo ratings yet
- Newcom# PDFDocument12 pagesNewcom# PDFlakkepoguNo ratings yet
- MmWave Mobile Communications For 5GDocument15 pagesMmWave Mobile Communications For 5GAsghar FarhadiNo ratings yet
- Data Communications and Computer Networks: A Business User's ApproachDocument22 pagesData Communications and Computer Networks: A Business User's ApproachlakkepoguNo ratings yet
- Tiii:: Unclassified 4 Hour Conference, W/ 7Hr PE1 Safety & Environmental Impact Is "LOW"Document29 pagesTiii:: Unclassified 4 Hour Conference, W/ 7Hr PE1 Safety & Environmental Impact Is "LOW"lakkepoguNo ratings yet
- Pulse Amplitude Modulation (PAM) : V Must Directly Proportional With VDocument6 pagesPulse Amplitude Modulation (PAM) : V Must Directly Proportional With VlakkepoguNo ratings yet
- Chap4 Lec2Document16 pagesChap4 Lec2lakkepoguNo ratings yet
- Information TheoryDocument21 pagesInformation TheorylakkepoguNo ratings yet
- Ieee Project Titles 2012-13: CONTACT: +91 9491535690, +91 7842358459Document22 pagesIeee Project Titles 2012-13: CONTACT: +91 9491535690, +91 7842358459lakkepoguNo ratings yet
- Column Layered Decoding PDFDocument10 pagesColumn Layered Decoding PDFlakkepoguNo ratings yet
- Ethernet/Ip™ Communication Unit Kv-Ep02: Instruction ManualDocument4 pagesEthernet/Ip™ Communication Unit Kv-Ep02: Instruction ManualNinh LêNo ratings yet
- How To Fix Power Button On BSNL Broadband Router UT300R2UDocument3 pagesHow To Fix Power Button On BSNL Broadband Router UT300R2UVidyasagarNo ratings yet
- Ecte324 8324 Lecture Notes wk3 2019 PDFDocument22 pagesEcte324 8324 Lecture Notes wk3 2019 PDFTuanHungNo ratings yet
- JGS 320 Electrical DrawingDocument279 pagesJGS 320 Electrical DrawingTariqMaqsood100% (2)
- Model 7Document4 pagesModel 7Saloni SharmaNo ratings yet
- HypersimDocument32 pagesHypersimgayathriNo ratings yet
- Jecet.v3i3c 7Document11 pagesJecet.v3i3c 7Jose LunaNo ratings yet
- EST. DE COORDINACION-Relay - BriefDocument4 pagesEST. DE COORDINACION-Relay - BriefCésar Luis Castillo ChiletNo ratings yet
- NA1 Air Circuit Breaker: Empower The WorldDocument56 pagesNA1 Air Circuit Breaker: Empower The WorldIbrahim Al-AssraNo ratings yet
- Calculating The Time Constant of An RC CircuitDocument11 pagesCalculating The Time Constant of An RC CircuitSrihari UttanurNo ratings yet
- DLD Micro Lesson PlaN 2 - Section CDocument4 pagesDLD Micro Lesson PlaN 2 - Section CMadhavarao K0% (1)
- HMI Industrial PC and Display 2015ENDocument88 pagesHMI Industrial PC and Display 2015ENEric Castillo PonceNo ratings yet
- DSP Setting Fundamentals PDFDocument14 pagesDSP Setting Fundamentals PDFsamuel mezaNo ratings yet
- Nas 6124 en PDFDocument5 pagesNas 6124 en PDFFrankDeviePaculguenQueridoNo ratings yet
- Electrical Safety Standards For LV - MV - HV (Part-3)Document8 pagesElectrical Safety Standards For LV - MV - HV (Part-3)Aravind EshwarNo ratings yet
- Tirex Corporate Presentation-1Document14 pagesTirex Corporate Presentation-1evolve energyNo ratings yet
- CPT Cirprotec PSC4 12 - 5 400 TT IR 77738406Document8 pagesCPT Cirprotec PSC4 12 - 5 400 TT IR 77738406niltonnas80No ratings yet
- Final Audit Format - 2022Document130 pagesFinal Audit Format - 2022VickyNo ratings yet
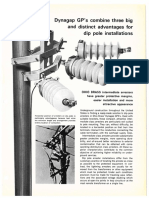
- Dynagap GPs Combine Three Big and Distinct Advantages For Dip Pole InstallationDocument3 pagesDynagap GPs Combine Three Big and Distinct Advantages For Dip Pole InstallationAnonymous 0V9Qzv1Po3No ratings yet
- Component Replacement: - ElectricalDocument11 pagesComponent Replacement: - Electricaltotem xpressNo ratings yet
- Op AmpDocument74 pagesOp AmpACSVNo ratings yet
- Cm751 Superscan 751 19 CRT DisplayDocument18 pagesCm751 Superscan 751 19 CRT DisplayRigoberto Quintana MontenegroNo ratings yet
- Cm400dy 12HDocument4 pagesCm400dy 12HMiguel GalvánNo ratings yet
- EE216 Electircal EngineeringDocument2 pagesEE216 Electircal Engineeringtrismahesh100% (1)
- Electric System - 1: Click The Volvo-Logo in The Lower Right Corner To Return To This Menu Main MenuDocument18 pagesElectric System - 1: Click The Volvo-Logo in The Lower Right Corner To Return To This Menu Main MenuPower MobileNo ratings yet
- Manual RipEX 400 PDFDocument157 pagesManual RipEX 400 PDFOscar Leonel RodriguezNo ratings yet
- YDQ产品说明书(09英)Document11 pagesYDQ产品说明书(09英)abay firewNo ratings yet