You might also like
- Stolen Child Tarot PDFDocument42 pagesStolen Child Tarot PDFBrandonChappell100% (1)
- Smith Et al-1958-AIChE Journal PDFDocument3 pagesSmith Et al-1958-AIChE Journal PDFAlastairNo ratings yet
- ESDU 73031 Convective Heat Transfer During Crossflow of Fluids Over Plain TubeDocument31 pagesESDU 73031 Convective Heat Transfer During Crossflow of Fluids Over Plain TubeArley Salazar HincapieNo ratings yet
- Axial Fan NotchDocument3 pagesAxial Fan NotchhahasiriusNo ratings yet
- Skin Burn Henrique Ecuations PDFDocument5 pagesSkin Burn Henrique Ecuations PDFcezar_iasiNo ratings yet
- A New Heat Transfer Correlation For Transition and Turbulent Fluid Flow in TubesDocument15 pagesA New Heat Transfer Correlation For Transition and Turbulent Fluid Flow in TubesAlexander LopezNo ratings yet
- Appendix A - General Thermodynamic FormulasDocument7 pagesAppendix A - General Thermodynamic Formulaskim haksongNo ratings yet
- Experimental Investigations of Flow Through ConicalDocument25 pagesExperimental Investigations of Flow Through Conicalaizatul nurulain binti mohd halilNo ratings yet
- A Generalized Method For Predicting The Minimum Fluidization Velocity - C. Y. WEN and Y. H. YUDocument3 pagesA Generalized Method For Predicting The Minimum Fluidization Velocity - C. Y. WEN and Y. H. YUJoão Vitor Apolinário FerreiraNo ratings yet
- Ejectors and Jet Pumps - Design For Steam Driven FlowDocument92 pagesEjectors and Jet Pumps - Design For Steam Driven FlowtjutjuNo ratings yet
- Particle Image VelocimetryDocument2 pagesParticle Image VelocimetrySaravana Kumar LakshmananNo ratings yet
- Pipe Flow Book Donald PDFDocument13 pagesPipe Flow Book Donald PDFAmogh SahajeNo ratings yet
- 2017 Ijts Cavitating-Flow PDFDocument12 pages2017 Ijts Cavitating-Flow PDFAdam AnugrahesaNo ratings yet
- Simulation of Compressors With The Help of An Engineering EquatiDocument9 pagesSimulation of Compressors With The Help of An Engineering EquatiFernandoFloresNo ratings yet
- Sanya - 19ae60r19 - Noise Reduction in Turbofan Engine - Seminar No. 3Document3 pagesSanya - 19ae60r19 - Noise Reduction in Turbofan Engine - Seminar No. 3Rather Laasani Sanya Shabir100% (2)
- Optimisation of The Fuel Manifold Locations Inside A Jet EngineDocument7 pagesOptimisation of The Fuel Manifold Locations Inside A Jet EngineVenkata Krishnan Gangadharan100% (1)
- Bird Stewart LightfootDocument87 pagesBird Stewart LightfootAkshay JadhavNo ratings yet
- Shock Tube Example ProblemDocument1 pageShock Tube Example ProblemThomas JohnsonNo ratings yet
- MSI Centrifugal Impeller Structural Resonance PDFDocument9 pagesMSI Centrifugal Impeller Structural Resonance PDFJigneshNo ratings yet
- Solution of Shell Side Flow Pressure Drop and Heat Transfer by Stream Analysis Method PDFDocument11 pagesSolution of Shell Side Flow Pressure Drop and Heat Transfer by Stream Analysis Method PDFAhmad Restian Adi NugrohoNo ratings yet
- Came 1998Document18 pagesCame 1998pradeepsmart1988100% (1)
- Airfoil Inverse DesignDocument12 pagesAirfoil Inverse DesignFilip StojkovskiNo ratings yet
- Transmission Loss in Piping From FisherDocument8 pagesTransmission Loss in Piping From FisheraruatscribdNo ratings yet
- Pressure Distribution of NACA Airfoil Aerodynamic CharactersiticsDocument6 pagesPressure Distribution of NACA Airfoil Aerodynamic CharactersiticsAnkithaNo ratings yet
- Radial-Inflow Turbines: Vavra, M. HDocument65 pagesRadial-Inflow Turbines: Vavra, M. HSiraj MohammedNo ratings yet
- Flow of Industrial Fluids Theory and EquatiionDocument431 pagesFlow of Industrial Fluids Theory and EquatiionZohaib Ahmed100% (1)
- Mathematical Tools For Sizing of Hard Ware As Per The NeedDocument44 pagesMathematical Tools For Sizing of Hard Ware As Per The NeedBaharudin LutfiNo ratings yet
- Combustion Modeling: Industry SolutionsDocument4 pagesCombustion Modeling: Industry SolutionsDimitri KaboreNo ratings yet
- Section On Hypersonic FlowDocument12 pagesSection On Hypersonic FlowP KNo ratings yet
- 2015 - 07094934Document9 pages2015 - 07094934mjimenezgNo ratings yet
- Thermodynamics An Engineering Approach 8Document1 pageThermodynamics An Engineering Approach 8Aracely PenaNo ratings yet
- Enhanced Emission Prediction Modeling and Analysis For Conceptual DesignDocument90 pagesEnhanced Emission Prediction Modeling and Analysis For Conceptual Designsb aliNo ratings yet
- Analysis of A Failed Pipe Elbow in Geothermal Production Facility PDFDocument7 pagesAnalysis of A Failed Pipe Elbow in Geothermal Production Facility PDFAz ArNo ratings yet
- 2163 Design of A Thermal Systems CourseDocument9 pages2163 Design of A Thermal Systems Courseerick_galeas9886No ratings yet
- Design of Helical SpringsDocument14 pagesDesign of Helical SpringsSerdar ArslanNo ratings yet
- Design and Testing of Ejectors For High Temperature Fuel Cell Hybrid SystemsDocument8 pagesDesign and Testing of Ejectors For High Temperature Fuel Cell Hybrid SystemsDr.S.RamamurthyNo ratings yet
- Minor Project PPT 1Document15 pagesMinor Project PPT 1Anirudh YadavNo ratings yet
- Experimental Analysis of Screw Compressor Noise and VibrationDocument18 pagesExperimental Analysis of Screw Compressor Noise and VibrationBayu SuprayogiNo ratings yet
- Exercicios CombustaoDocument19 pagesExercicios CombustaoFeno'c FenosseNo ratings yet
- Supersonic NozzleDocument6 pagesSupersonic NozzleP K100% (1)
- 1 s2.0 001793108490262X MainDocument18 pages1 s2.0 001793108490262X MainReza KH100% (1)
- Chapter 8. Internal Flow (Bounded, Forced)Document31 pagesChapter 8. Internal Flow (Bounded, Forced)wadec24No ratings yet
- 05-PT11-Cascade Aerodynamics (Compatibility Mode)Document45 pages05-PT11-Cascade Aerodynamics (Compatibility Mode)Venkat Pavan100% (1)
- CFD Analysis of Heat Transfer in Helical CoilDocument5 pagesCFD Analysis of Heat Transfer in Helical CoilAnonymous kw8Yrp0R5rNo ratings yet
- Anti-Surge - Valve - ROI - REXA - 2Document10 pagesAnti-Surge - Valve - ROI - REXA - 2Hash LalaNo ratings yet
- Applications of Computational Fluid Dynamics in HydraulicsDocument26 pagesApplications of Computational Fluid Dynamics in HydraulicsAditya KaranNo ratings yet
- 1 s2.0 S0263876299718186 Main PDFDocument7 pages1 s2.0 S0263876299718186 Main PDFLeydi PatiñoNo ratings yet
- Wind Tunnel CorrectionDocument13 pagesWind Tunnel CorrectionSetyo NugrohoNo ratings yet
- Icing SimulationDocument50 pagesIcing SimulationasdfgbugmenotNo ratings yet
- Radial Equilibrium Theory PDFDocument26 pagesRadial Equilibrium Theory PDFLuis C. Sosa ManzoNo ratings yet
- Coding Tutorials For Computational Fluid Dynamics: Ahmed Al MakkyDocument99 pagesCoding Tutorials For Computational Fluid Dynamics: Ahmed Al Makkyanon_994111445No ratings yet
- Desa2011 PDFDocument5 pagesDesa2011 PDFTayyabIsmailNo ratings yet
- CFD Analysis of Can CombustorDocument25 pagesCFD Analysis of Can CombustorMoses DevaprasannaNo ratings yet
- ADIABATIC FLOW IN A DUCT WITH FRICTION FrictionDuct Sept 2011Document7 pagesADIABATIC FLOW IN A DUCT WITH FRICTION FrictionDuct Sept 2011croprobosNo ratings yet
- Content ServerDocument21 pagesContent ServerÁngelCarlosGarcíaNo ratings yet
- Potential FlowsDocument13 pagesPotential FlowsJuan Gonzalez100% (1)
- Cinetica Rop PDFDocument14 pagesCinetica Rop PDFDiana Isabel Franco ZambranoNo ratings yet
- Modern Developments in the Mechanics of ContinuaFrom EverandModern Developments in the Mechanics of ContinuaSalamon EskinaziNo ratings yet
- AnswersDocument21 pagesAnswersinaya aggarwalNo ratings yet
- EngagementDocument7 pagesEngagementanne garciaNo ratings yet
- ASAL Biology Sample PDFDocument32 pagesASAL Biology Sample PDFandry hidayatNo ratings yet
- Perfect Draw! Quick-Play Judges' Kit - v1.7Document28 pagesPerfect Draw! Quick-Play Judges' Kit - v1.7NathanexNo ratings yet
- PEC L5 Review - U1-3 - BasicDocument9 pagesPEC L5 Review - U1-3 - BasicDesNo ratings yet
- Red Bull-Case Study (CH 7)Document1 pageRed Bull-Case Study (CH 7)Tooba HussainNo ratings yet
- 2023-06-19 12:55:48:1870 - AnrDocument144 pages2023-06-19 12:55:48:1870 - AnrLebohang TsotetsiNo ratings yet
- NCERT Exemplar Problems From Class 8 Mathematics Unit 1 Rational NumbersDocument32 pagesNCERT Exemplar Problems From Class 8 Mathematics Unit 1 Rational NumbersGulshan DubeyNo ratings yet
- Mutual Ncnda - Gei STDDocument4 pagesMutual Ncnda - Gei STDgraceenggint8799No ratings yet
- Soal GrammarDocument27 pagesSoal GrammarZhanny SunNo ratings yet
- What Is DesulfurizationDocument20 pagesWhat Is DesulfurizationYash NandurkarNo ratings yet
- Practice Too EnoughDocument4 pagesPractice Too EnoughSHEYLA ESTEFANY FERRUA JAVIERNo ratings yet
- VOCABULARYDocument4 pagesVOCABULARYKhim Wanden AvanceNo ratings yet
- Pardot For The Salesforce AdministratorDocument12 pagesPardot For The Salesforce AdministratorAkshay NaikNo ratings yet
- 2ND Quarter - Lesson 7 - Multimodal Elements - Interpreting Audio SignalsDocument14 pages2ND Quarter - Lesson 7 - Multimodal Elements - Interpreting Audio SignalsMay Lydia LagadiaNo ratings yet
- Guitar StrumDocument13 pagesGuitar Strumapi-373158267% (3)
- ESD ValvesDocument19 pagesESD Valvesrkubal100% (1)
- BOQ Health Declaration RegistrationDocument2 pagesBOQ Health Declaration RegistrationMaria Rivera-wattNo ratings yet
- Sporlan Adlse-2Document12 pagesSporlan Adlse-2Serrefriair Garcia RefriNo ratings yet
- MDBTL Form 20190131220915 7000000081847160Document1 pageMDBTL Form 20190131220915 7000000081847160mohdwajid2009No ratings yet
- Exercise Number1Document3 pagesExercise Number1Jessa Millen OconNo ratings yet
- NG Rtgs Ver 16th June14Document3 pagesNG Rtgs Ver 16th June14Supreeth SharmaNo ratings yet
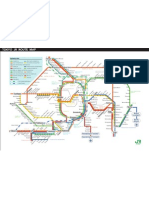
- Tokyo JRDocument1 pageTokyo JRsheilaabad8766No ratings yet
- Musings The Positive Carry Hedge 2Document6 pagesMusings The Positive Carry Hedge 2Fernando Perez SavadorNo ratings yet
- DLL Biology FinalDocument11 pagesDLL Biology FinalAcza Jaimee C. Kalaw100% (5)
- Products of CombustionDocument5 pagesProducts of CombustionAJ SiosonNo ratings yet
- Veiga 2007Document13 pagesVeiga 2007Jeampierr JIMENEZ MARQUEZNo ratings yet
- Online Project ProposalDocument11 pagesOnline Project Proposalየአብስራ ፍቅሬNo ratings yet
- Consent Form For TestimonialDocument1 pageConsent Form For TestimonialDenzel Joe PebojotNo ratings yet