You might also like
- Lab 4 Stepper Motor PDFDocument10 pagesLab 4 Stepper Motor PDFIrfan HaiderNo ratings yet
- Stepper Motor & Servo Motor: S.RavisubramanianDocument78 pagesStepper Motor & Servo Motor: S.RavisubramanianRajesh Vella100% (3)
- Stepper MotorsDocument53 pagesStepper MotorsirfancardiagnosticNo ratings yet
- Stepper Motor - Types, Advantages and ApplicationsDocument2 pagesStepper Motor - Types, Advantages and ApplicationsBilalNo ratings yet
- Ali - Stepper MotorsDocument18 pagesAli - Stepper MotorsJisha KuruvillaNo ratings yet
- Stepper Motors - An Overview: Aliasgar Kutiyanawala Utah State UniversityDocument18 pagesStepper Motors - An Overview: Aliasgar Kutiyanawala Utah State UniversitycrsarinNo ratings yet
- Arbaminch University: Facality of Electrical and Computer Engineering Interface and Micro Computer Progect Steper MotorDocument12 pagesArbaminch University: Facality of Electrical and Computer Engineering Interface and Micro Computer Progect Steper MotorEphrem DanielNo ratings yet
- Stepper Motor GuideDocument13 pagesStepper Motor Guidejit dharaNo ratings yet
- Stepper MotorDocument11 pagesStepper MotorhaaenNo ratings yet
- I/ Structure and Operation: Stepper MotorDocument11 pagesI/ Structure and Operation: Stepper MotorTuanVUNo ratings yet
- A Stepper Motor Is A "Pulse-Driven" Motor That Changes The Angular Position of The Rotor in "Steps" It Is A Digital Electromechanical Device DefineDocument35 pagesA Stepper Motor Is A "Pulse-Driven" Motor That Changes The Angular Position of The Rotor in "Steps" It Is A Digital Electromechanical Device DefineSupriya RakshitNo ratings yet
- Motor AppplicationDocument17 pagesMotor Appplicationtajul tonoyNo ratings yet
- What Is A Stepper MotorDocument12 pagesWhat Is A Stepper MotorteddiyfentawNo ratings yet
- Introduction To Special MachinesDocument11 pagesIntroduction To Special MachinesSankaran Nampoothiri KrishnanNo ratings yet
- What Is A Stepper MotorDocument8 pagesWhat Is A Stepper MotorGnanasekarNo ratings yet
- STEPPER MOTOR DEFINITIONDocument19 pagesSTEPPER MOTOR DEFINITIONIan Bagunas100% (2)
- 1 - Stepper MotorDocument3 pages1 - Stepper MotorHARSHIT TOMARNo ratings yet
- Brushless DC Electric Motor: Fundamentals of OperationDocument12 pagesBrushless DC Electric Motor: Fundamentals of OperationRaffi SkNo ratings yet
- Special-Purpose Electric MachinesDocument11 pagesSpecial-Purpose Electric MachinesPrasun DasNo ratings yet
- EEM 355 - Mtronic System - Special Machine Drives 1Document25 pagesEEM 355 - Mtronic System - Special Machine Drives 1Elaine KhooNo ratings yet
- Part II - AC MotorsDocument30 pagesPart II - AC MotorsYan Liang HaoNo ratings yet
- Stepper Motor Control Using ArduinoDocument22 pagesStepper Motor Control Using ArduinoNâwãl KîšhôřNo ratings yet
- Introduction: Unipolar Stepper MotorDocument4 pagesIntroduction: Unipolar Stepper MotorRishabh PandayNo ratings yet
- Stepper Motor: Working, Cosntruction, Types, Advantages and DisadvantagesDocument5 pagesStepper Motor: Working, Cosntruction, Types, Advantages and DisadvantagesMd Samee MNo ratings yet
- Step Motor Engineer (2002 Catlog)Document13 pagesStep Motor Engineer (2002 Catlog)engineer86No ratings yet
- Stepper Motor ControlDocument8 pagesStepper Motor ControlAyaz FaisalNo ratings yet
- System Basics: Delta Precision Motors LTDDocument10 pagesSystem Basics: Delta Precision Motors LTDnycknikkiNo ratings yet
- Joystick Control of Stepper Motor Using ArduinoDocument7 pagesJoystick Control of Stepper Motor Using ArduinoDany Mathew100% (2)
- Stepper MotorDocument18 pagesStepper MotorGanesh Pingle100% (1)
- Synchronous Machine: Both Air Gap Field and Rotor Rotate at Synchronous Speed Doubly-Excited Machine - Unique FeatureDocument24 pagesSynchronous Machine: Both Air Gap Field and Rotor Rotate at Synchronous Speed Doubly-Excited Machine - Unique FeatureAstitva PriyadarshiNo ratings yet
- Stepping Motors Basic Info and ConstructionDocument1 pageStepping Motors Basic Info and ConstructionPropolis MeliaNo ratings yet
- Design and Analysis of Hybrid Stepper MotorDocument16 pagesDesign and Analysis of Hybrid Stepper MotorARVIND100% (2)
- STEPPER MOTOR GUIDEDocument10 pagesSTEPPER MOTOR GUIDEMohammed SiddiqueNo ratings yet
- EEC Unit VDocument10 pagesEEC Unit VTushar ShindeNo ratings yet
- Stepper Motor: From Wikipedia, The Free EncyclopediaDocument42 pagesStepper Motor: From Wikipedia, The Free EncyclopediaJoeson RosarioNo ratings yet
- Unit III SPMDocument65 pagesUnit III SPMMukesh KatoleNo ratings yet
- Stepper Motor Basics: A Guide to Understanding Fundamentals and ApplicationsDocument11 pagesStepper Motor Basics: A Guide to Understanding Fundamentals and ApplicationsrvpilotNo ratings yet
- 060 Actuators For RobotsDocument69 pages060 Actuators For RobotsMohamad YazidNo ratings yet
- Controlling Stepper/DC/Servo Motors With Arduino/NI DAQ/PMACDocument17 pagesControlling Stepper/DC/Servo Motors With Arduino/NI DAQ/PMACandita ranniNo ratings yet
- Special Electrical Machines: Reluctance, Vernier & Stepping MotorsDocument5 pagesSpecial Electrical Machines: Reluctance, Vernier & Stepping MotorsEswaran0% (1)
- Stepper MotorDocument25 pagesStepper Motorhemamanikumar100% (1)
- Unit I (SM) PDFDocument89 pagesUnit I (SM) PDFshiva sai donthulaNo ratings yet
- 9927 CH 9Document25 pages9927 CH 9varaprasad93No ratings yet
- Department of Electrical EngineeringDocument9 pagesDepartment of Electrical EngineeringSuraj KumarNo ratings yet
- Electric MotorsDocument26 pagesElectric Motorssetsindia3735No ratings yet
- Principle of Operation: Key Elements Interacting To Produce MotionDocument5 pagesPrinciple of Operation: Key Elements Interacting To Produce MotionamitbslpawarNo ratings yet
- Stepper Motor: Stepper Motors and Their ControllersDocument59 pagesStepper Motor: Stepper Motors and Their ControllersJain Marshel B100% (1)
- Servo-Motor: Batch 7: Mouli R N Nagaaswin N Naveen K Nilesh Ram Praveen K Nirmal Kumar SDocument27 pagesServo-Motor: Batch 7: Mouli R N Nagaaswin N Naveen K Nilesh Ram Praveen K Nirmal Kumar SThameem AbbasNo ratings yet
- Types of Stepper MotorDocument6 pagesTypes of Stepper MotorFazal Aziz WaliNo ratings yet
- Voltage Source Inverter Control of Induction MotorsDocument34 pagesVoltage Source Inverter Control of Induction MotorsPrem SagarNo ratings yet
- Stepper Motor OverviewDocument13 pagesStepper Motor OverviewThuan Bui ThanhNo ratings yet
- PRJ Stepper TestDocument5 pagesPRJ Stepper TestAndrea MissagliaNo ratings yet
- Stepper Motors - An Overview: Aliasgar Kutiyanawala Utah State UniversityDocument18 pagesStepper Motors - An Overview: Aliasgar Kutiyanawala Utah State UniversitykokyawzawNo ratings yet
- DK9222 0410 0014Document10 pagesDK9222 0410 0014Balachander KalappanNo ratings yet
- H Assignment 2Document5 pagesH Assignment 2Isuru KodikaraNo ratings yet
- Lab Report G 15-1Document12 pagesLab Report G 15-1Suleiman Abubakar AuduNo ratings yet
- DC ServomotorDocument16 pagesDC ServomotorNSS18EE048 BILINE KCNo ratings yet
- EPO640 Electrical Drives: BLDC and Stepper MotorsDocument36 pagesEPO640 Electrical Drives: BLDC and Stepper MotorsZariz ZakianNo ratings yet
- Research Article: Improving The Efficiency of Photovoltaic Panels Using Machine Learning ApproachDocument6 pagesResearch Article: Improving The Efficiency of Photovoltaic Panels Using Machine Learning Approachmanoj kumarNo ratings yet
- Simulation Model of Hydro Power Plant Using Matlab/SimulinkDocument8 pagesSimulation Model of Hydro Power Plant Using Matlab/Simulinkmanoj kumarNo ratings yet
- Eee R13Document33 pagesEee R13manoj kumarNo ratings yet
- Air Conditioner75-79Document36 pagesAir Conditioner75-79vatikaNo ratings yet
- Batteries PresentationDocument24 pagesBatteries PresentationGajendraPatelNo ratings yet
- Simulation Model of Hydro Power Plant Using Matlab/SimulinkDocument8 pagesSimulation Model of Hydro Power Plant Using Matlab/Simulinkmanoj kumarNo ratings yet
- Ideasubmissionprocess SIH2020Document5 pagesIdeasubmissionprocess SIH2020Vikas NSNo ratings yet
- Power Electronics Devices and ApplicationsDocument52 pagesPower Electronics Devices and Applicationsmanoj kumarNo ratings yet
- Linear Integrated Circuits GuideDocument47 pagesLinear Integrated Circuits Guidemanoj kumarNo ratings yet
- Ac Volt Cont Cyclo ConvDocument41 pagesAc Volt Cont Cyclo Convmanoj kumarNo ratings yet
- Single Phase Dual Converter: Power Electronics by Prof. M. Madhusudhan Rao 1Document3 pagesSingle Phase Dual Converter: Power Electronics by Prof. M. Madhusudhan Rao 1manoj kumarNo ratings yet
- Basics of Operational AmplifierDocument20 pagesBasics of Operational Amplifiermanoj kumarNo ratings yet
- Bridge Inverter'Document21 pagesBridge Inverter'manoj kumarNo ratings yet
- Diode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC ConverterDocument5 pagesDiode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC Convertermanoj kumarNo ratings yet
- Special MachinesDocument48 pagesSpecial Machinesmanoj kumarNo ratings yet
- PDFDocument9 pagesPDFmanoj kumarNo ratings yet
- Revised Blooms InfoDocument12 pagesRevised Blooms Infoapi-232411650No ratings yet
- eVALUATION SHEETDocument1 pageeVALUATION SHEETmanoj kumarNo ratings yet
- Evaluation Guidelines Tier II v0Document27 pagesEvaluation Guidelines Tier II v0Anonymous D5OSzzfNo ratings yet
- Space Vector ModulationDocument15 pagesSpace Vector Modulationmanoj kumarNo ratings yet
- Induction Generator For Wind Power GenerationDocument28 pagesInduction Generator For Wind Power Generationmanoj kumarNo ratings yet
- Structure and Syllabus of M. Tech. (Electrical Drives and Control)Document41 pagesStructure and Syllabus of M. Tech. (Electrical Drives and Control)manoj kumarNo ratings yet
- 07 - Chapter 2 PDFDocument37 pages07 - Chapter 2 PDFmanoj kumarNo ratings yet
- Stepper MotorDocument14 pagesStepper MotorShivan BiradarNo ratings yet
- There Are Few Types of Stepper MotorsDocument41 pagesThere Are Few Types of Stepper Motorsmanoj kumarNo ratings yet
- Vel Tech Multitech Weekly Schedule 2015-2016Document18 pagesVel Tech Multitech Weekly Schedule 2015-2016VishnupriyaNo ratings yet
- Ac Volt Cont Cyclo ConvDocument41 pagesAc Volt Cont Cyclo Convmanoj kumarNo ratings yet
- Ac Volt Cont Cyclo ConvDocument41 pagesAc Volt Cont Cyclo Convmanoj kumarNo ratings yet
- SCRDocument1 pageSCRmanoj kumarNo ratings yet
- Sugar Mill DrivesDocument8 pagesSugar Mill Drivessayyadmannan67% (3)
- Cable Reel Catalog1Document52 pagesCable Reel Catalog1Hassan ShahatNo ratings yet
- Engine Control Unit, ECU 100Document8 pagesEngine Control Unit, ECU 100MasErn100% (1)
- Universal Circuit BreakerDocument3 pagesUniversal Circuit BreakerMalith DeemanthaNo ratings yet
- Software-Defined-Radio: National University of Science and TechnologyDocument19 pagesSoftware-Defined-Radio: National University of Science and TechnologyZain ShabbirNo ratings yet
- Borri B400 Datasheet Com5Document2 pagesBorri B400 Datasheet Com5Anonymous RlEl9pZFbtNo ratings yet
- Consilium: CS4000 System Boards IPLC, Loop BoardDocument2 pagesConsilium: CS4000 System Boards IPLC, Loop BoardTURARAMANo ratings yet
- Ergoplus 400: Mig Welding (Gmaw)Document2 pagesErgoplus 400: Mig Welding (Gmaw)Стефан АнтонићNo ratings yet
- DC Drive Setup InstructionsDocument5 pagesDC Drive Setup InstructionsKanwal Jeet MahalNo ratings yet
- Dse7410 Mkii Dse7420 Mkii Operators ManualDocument184 pagesDse7410 Mkii Dse7420 Mkii Operators ManualAngelo parra100% (2)
- Olivetti D-Color MF220, MF280, MF360 Service Manual PDFDocument849 pagesOlivetti D-Color MF220, MF280, MF360 Service Manual PDFJames HarperNo ratings yet
- Life Cycle Testing of Electrical Loads by Down Counter: AbstractDocument4 pagesLife Cycle Testing of Electrical Loads by Down Counter: AbstractTRIAD TECHNO SERVICESNo ratings yet
- M17 Manual PDFDocument103 pagesM17 Manual PDFDario GeraciNo ratings yet
- 450/750V PVC Insulated Copper Cable SpecDocument1 page450/750V PVC Insulated Copper Cable SpecBagus Arief WibowoNo ratings yet
- DVD Noblex Dvd-1350: 3828 Control Borad SechmaticDocument15 pagesDVD Noblex Dvd-1350: 3828 Control Borad SechmaticMariano Ohienart100% (1)
- t1635t 8i PDFDocument10 pagest1635t 8i PDFAhmed MataryNo ratings yet
- Manual Stamford Avr MX342 PDFDocument4 pagesManual Stamford Avr MX342 PDFSeVictor Rudas CajaNo ratings yet
- Steepness of The Travelling Wave Is Attenuated by Select OneDocument20 pagesSteepness of The Travelling Wave Is Attenuated by Select Oneعبودي الامينNo ratings yet
- Insulation flanges prevent ignition from low voltage arcsDocument14 pagesInsulation flanges prevent ignition from low voltage arcsFernando Igor AlvarezNo ratings yet
- AFSEM™ - SEM Compatibility List: AFM Integration Into SEMDocument6 pagesAFSEM™ - SEM Compatibility List: AFM Integration Into SEMchangiz2220No ratings yet
- SensorLink - Radio Ampstik Datasheet v01Document2 pagesSensorLink - Radio Ampstik Datasheet v01distribusi masohiNo ratings yet
- Acuvim II Power Meter User Manual 1040E1303Document305 pagesAcuvim II Power Meter User Manual 1040E1303Natan HernandezNo ratings yet
- 220 110kV Substation at KAVOOR Design Instruction SheetDocument2 pages220 110kV Substation at KAVOOR Design Instruction SheetRubesh KumarNo ratings yet
- Lesson Plan-Eim-4th Quarter 10&11Document15 pagesLesson Plan-Eim-4th Quarter 10&11Rolando Basi100% (1)
- SIN3V DeviceNet IM EN TOBPC730600 28B 1 0Document37 pagesSIN3V DeviceNet IM EN TOBPC730600 28B 1 0Jesus Rubio JR IINo ratings yet
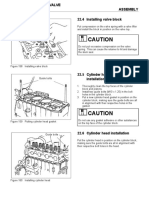
- Install and adjust cylinder head valvesDocument96 pagesInstall and adjust cylinder head valvesLudwig Levallet100% (1)
- Standard Operating Procedure MaintenanceDocument6 pagesStandard Operating Procedure MaintenancePADCL100% (1)
- Medium Voltage Switchgear SpecificationDocument10 pagesMedium Voltage Switchgear Specificationhung nguyenNo ratings yet
- Metering Is Our Business Modular Electricity MeterDocument2 pagesMetering Is Our Business Modular Electricity MeterFaizalAhmedNo ratings yet
- Philips Power Supply DELTA PDFDocument33 pagesPhilips Power Supply DELTA PDFnorbertoNo ratings yet