You might also like
- OPIF13 Notes6 Lagrangian Mechanics IDocument30 pagesOPIF13 Notes6 Lagrangian Mechanics IABISAI RASCON ESTRADANo ratings yet
- ENGR 2422 Engineering Mathematics 2 Brief Notes On Chapter 1 1.1 Lines and PlanesDocument10 pagesENGR 2422 Engineering Mathematics 2 Brief Notes On Chapter 1 1.1 Lines and PlanesbihanbaNo ratings yet
- 1 0-KinamaticDocument49 pages1 0-KinamaticSfyr sfyrNo ratings yet
- Transport Phenomena - 2-3 - Vector and Tensor 2 and CoordinatesDocument22 pagesTransport Phenomena - 2-3 - Vector and Tensor 2 and CoordinatesHareritamNo ratings yet
- Lecture 2Document7 pagesLecture 2prashantNo ratings yet
- Solved Problems in Mechanics 2016Document28 pagesSolved Problems in Mechanics 2016Debbie TonogNo ratings yet
- Generalized Linear Targeting and GuidanceDocument11 pagesGeneralized Linear Targeting and GuidanceAnonymous REw1YIq4q7No ratings yet
- Vector CalculusDocument46 pagesVector CalculusHimanshu RajNo ratings yet
- 6-Dynamics - Notes - Curvilinear Motion (Polar) - 2019 - AB - HFDocument16 pages6-Dynamics - Notes - Curvilinear Motion (Polar) - 2019 - AB - HFAyesha Maher khanNo ratings yet
- Lecture 08Document8 pagesLecture 08habboNo ratings yet
- Classical Mechanics IIT Jam Practice PaperDocument4 pagesClassical Mechanics IIT Jam Practice PapershivanandNo ratings yet
- Chapter 2Document91 pagesChapter 2Won SeteNo ratings yet
- Phys 1 Memo Vizsga 2012Document14 pagesPhys 1 Memo Vizsga 2012BlazsNo ratings yet
- Electromagnetic Theory 2 2019 PDFDocument49 pagesElectromagnetic Theory 2 2019 PDFchulaNo ratings yet
- Chapter 2Document160 pagesChapter 2yohannes lemiNo ratings yet
- Motion in Two and Three DimensionsDocument16 pagesMotion in Two and Three DimensionsBrandy Swanburg SchauppnerNo ratings yet
- (B) Velocity and Acceleration in Polar CoordinateDocument2 pages(B) Velocity and Acceleration in Polar CoordinatePallav TiwariNo ratings yet
- (B) Velocity and Acceleration in Polar CoordinateDocument2 pages(B) Velocity and Acceleration in Polar CoordinateAkshay SharmaNo ratings yet
- NE 304: Introduction To Nuclear Engineering: Topic:Equation of ContinuityDocument29 pagesNE 304: Introduction To Nuclear Engineering: Topic:Equation of ContinuityMaher1420No ratings yet
- Laminar & Turbulent Flow VisualizationDocument16 pagesLaminar & Turbulent Flow VisualizationsusheemNo ratings yet
- Maxwell's Equations and Light Waves: Electric FieldDocument32 pagesMaxwell's Equations and Light Waves: Electric FieldSiddharth RajamohananNo ratings yet
- Lecture 3: Methods and Terminology, Part IDocument15 pagesLecture 3: Methods and Terminology, Part IRajkishore DasNo ratings yet
- Navamathavan.r@vit - Ac.in: Dr. R. Navamathavan Physics Division School of Advanced Sciences (SAS)Document24 pagesNavamathavan.r@vit - Ac.in: Dr. R. Navamathavan Physics Division School of Advanced Sciences (SAS)Somesh MuruganNo ratings yet
- 1st Printing: Errata For Instructor's Solutions Manual For Gravity, An Introduction To Einstein's General RelativityDocument8 pages1st Printing: Errata For Instructor's Solutions Manual For Gravity, An Introduction To Einstein's General RelativitydsmahantaNo ratings yet
- 02 Particle Kinematics 1Document22 pages02 Particle Kinematics 1Xabi LopezNo ratings yet
- Fundamentals For Finite Element MethodDocument34 pagesFundamentals For Finite Element MethodnaderNo ratings yet
- Smith Thermo CH 5 Introduction Statistical MechanicsDocument24 pagesSmith Thermo CH 5 Introduction Statistical Mechanicsjeongyun271No ratings yet
- Chapter 11: Special Theory of Relativity: (Ref.: Marion & Heald, "Classical Electromagnetic Radiation," 3rd Ed., Ch. 14)Document73 pagesChapter 11: Special Theory of Relativity: (Ref.: Marion & Heald, "Classical Electromagnetic Radiation," 3rd Ed., Ch. 14)Patrick SibandaNo ratings yet
- Transverse Vibration of Stretched Strings: Politecnico Di Milano M.Sc. in Mechanical EngineeringDocument15 pagesTransverse Vibration of Stretched Strings: Politecnico Di Milano M.Sc. in Mechanical EngineeringArnab B.No ratings yet
- Introduction For DynamicsDocument17 pagesIntroduction For DynamicsBerniaga TasNo ratings yet
- BTech Sem I Vector Differentiatn1Document14 pagesBTech Sem I Vector Differentiatn1aman bhatiaNo ratings yet
- ParticleDynamics Class Part1Document16 pagesParticleDynamics Class Part1Rohan Bhupen Shah ae22b052No ratings yet
- ME101 Lecture24 KD PDFDocument21 pagesME101 Lecture24 KD PDFMary EuniceNo ratings yet
- Notes 16Document14 pagesNotes 16sanyam KanungaNo ratings yet
- Classical Mechanic I-SummerDocument62 pagesClassical Mechanic I-SummerAnonymous 3AZqIcYUF100% (1)
- Lect3 - 2020 SEM2 1920Document25 pagesLect3 - 2020 SEM2 1920Praven KumarNo ratings yet
- Vector Control of IMDocument62 pagesVector Control of IMsajs201100% (9)
- Brownian Theory For Mihir PDFDocument5 pagesBrownian Theory For Mihir PDFRajat BahugunaNo ratings yet
- Sinusoids, Phasors, and Steady-State AnalysisDocument53 pagesSinusoids, Phasors, and Steady-State AnalysisryanNo ratings yet
- 6-SUPPLEMENTARY - MATERIAL - 00400 - Vector - and - Scalar - Fields - KopyaDocument9 pages6-SUPPLEMENTARY - MATERIAL - 00400 - Vector - and - Scalar - Fields - KopyamelihNo ratings yet
- 6 SYSC5602 Z Transform 2009Document49 pages6 SYSC5602 Z Transform 2009SmartunblurrNo ratings yet
- General Relativity 4Document13 pagesGeneral Relativity 4HarshitNo ratings yet
- Ch07 KinematicsDocument17 pagesCh07 KinematicsKhansa RazzaqNo ratings yet
- Motion in Two Dimension: IgureDocument17 pagesMotion in Two Dimension: Igurep_k_soni_iit_physicsNo ratings yet
- Kinematics of A Particle: by Dr. Toh Hoong ThiamDocument27 pagesKinematics of A Particle: by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- 2 2 BernoulliDocument70 pages2 2 BernoulliCatur PamungkasNo ratings yet
- M1 TextJT New1Document119 pagesM1 TextJT New1ifratsubhaNo ratings yet
- M2-2 Kinematika Dua Dimensi Gerak Parabola Dan Gerak MelingkarDocument118 pagesM2-2 Kinematika Dua Dimensi Gerak Parabola Dan Gerak MelingkarAulia Mi'rajNo ratings yet
- An Outlook of Shape Functions and $F (R) $ Gravity For Morris-Thorne Wormhole SolutionsDocument8 pagesAn Outlook of Shape Functions and $F (R) $ Gravity For Morris-Thorne Wormhole SolutionsOmar islam laskarNo ratings yet
- Schuh17a Supp PDFDocument28 pagesSchuh17a Supp PDFRahul BamaniaNo ratings yet
- 4 Newton's Law and ApplicationsDocument23 pages4 Newton's Law and ApplicationsMak YabuNo ratings yet
- Chapter 13 PDFDocument74 pagesChapter 13 PDFSiddharth GandhiNo ratings yet
- Lec 03Document8 pagesLec 03서세일No ratings yet
- SBRML Part1 Differential Geometry in RoboticsDocument28 pagesSBRML Part1 Differential Geometry in Roboticsshantam bajpaiNo ratings yet
- Applied Electromagnetics: Early Transmission Lines ApproachDocument73 pagesApplied Electromagnetics: Early Transmission Lines ApproachWalter TengNo ratings yet
- Propagation of Waves: Friday October 18, 2002Document20 pagesPropagation of Waves: Friday October 18, 2002Dande LionNo ratings yet
- Lecture 17Document20 pagesLecture 17Dande LionNo ratings yet
- EMW Mod3@AzDOCUMENTS - inDocument75 pagesEMW Mod3@AzDOCUMENTS - inMuhammed Asim ANo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- RACMETDocument54 pagesRACMETAthanasoulis KostasNo ratings yet
- ns23.4 Handout - 4 Slides PerDocument40 pagesns23.4 Handout - 4 Slides PerHectorNo ratings yet
- Iom Ad3878001 Powercore Cpc-3 To Cpc-48Document36 pagesIom Ad3878001 Powercore Cpc-3 To Cpc-48Pamukat TranggonoNo ratings yet
- Corrosion AllowanceDocument3 pagesCorrosion AllowanceSarbendu PaulNo ratings yet
- Directory of Suppliers To Cement Industry: Product Category-WiseDocument1 pageDirectory of Suppliers To Cement Industry: Product Category-WiseAneeshNo ratings yet
- Kinetics of A Particle Impulse and MomentumDocument17 pagesKinetics of A Particle Impulse and MomentumTejada, Brent LesterNo ratings yet
- Portable Turmeric Boiling System: Project Review 2Document12 pagesPortable Turmeric Boiling System: Project Review 2Akash JaiswalNo ratings yet
- Facts Volume 1Document92 pagesFacts Volume 1Maniak Muligambia100% (1)
- Taheri-Degradation and Improvement of Mechanical Properties of Rock Under Triaxial Compressive Cyclic LoadingDocument8 pagesTaheri-Degradation and Improvement of Mechanical Properties of Rock Under Triaxial Compressive Cyclic LoadingRichardson Chavez TaypeNo ratings yet
- Use of Fiber-Reinforced Soil For Blast ProtectionDocument16 pagesUse of Fiber-Reinforced Soil For Blast ProtectionSameer ShashwatNo ratings yet
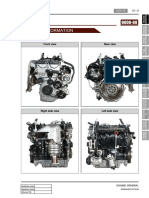
- Layout: Rear View Front ViewDocument14 pagesLayout: Rear View Front ViewRms AutomotrizNo ratings yet
- Atif Baig (22467), Lal Chand (21591) Abdul Hannan (21618 Alveena (21651)Document1 pageAtif Baig (22467), Lal Chand (21591) Abdul Hannan (21618 Alveena (21651)Lal ChandNo ratings yet
- Benelli Tre-K 1130 Motorcycle Owners ManualDocument104 pagesBenelli Tre-K 1130 Motorcycle Owners Manualtrevor540960% (5)
- Honda CRZ 2011 2012 Service ManualDocument20 pagesHonda CRZ 2011 2012 Service Manualdonna100% (49)
- Brownian Motion & Diffusion: - DefinitionDocument9 pagesBrownian Motion & Diffusion: - DefinitionAndreaNo ratings yet
- Design of Shells (Example Problem)Document5 pagesDesign of Shells (Example Problem)AkarshGowdaNo ratings yet
- Stability-Calculation For PipelineDocument2 pagesStability-Calculation For PipelineGeorge100% (1)
- Ejector PinsDocument21 pagesEjector PinssyazwanmahadzirNo ratings yet
- Lecture - 3 Design LoadsDocument62 pagesLecture - 3 Design Loadshammads88No ratings yet
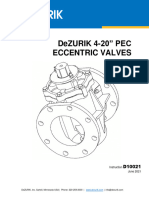
- Válvula Cono DezurikDocument17 pagesVálvula Cono DezurikMatias OnateNo ratings yet
- Operating Check List For Disel Generator: Date: TimeDocument2 pagesOperating Check List For Disel Generator: Date: TimeAshfaq BilwarNo ratings yet
- HMC 080Document12 pagesHMC 080Mohamed ElmakkyNo ratings yet
- Parts ManualDocument239 pagesParts ManualDavid MaddenNo ratings yet
- CH 3 Review Load and Stress AnalysisDocument33 pagesCH 3 Review Load and Stress AnalysisAnas TubailNo ratings yet
- 2007 Nissan Quest Power Steering Repair ManualDocument26 pages2007 Nissan Quest Power Steering Repair ManualService Manual50% (2)
- 15 EarthquakesDocument19 pages15 EarthquakesSivaKumarNo ratings yet
- Perkins (EP)Document2 pagesPerkins (EP)Leo Dwi ArmandaNo ratings yet
- A Technical Seminar On: Suspension SystemDocument24 pagesA Technical Seminar On: Suspension SystemRanjan suvarnaNo ratings yet
- AGIP STD - Valves Specification SheetDocument1 pageAGIP STD - Valves Specification Sheethalim_kaNo ratings yet
- 50 Hints Class A CDL Permit Test PDFDocument5 pages50 Hints Class A CDL Permit Test PDFsharu4291100% (3)