You might also like
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Context and Its Significance To PragmaticsDocument5 pagesContext and Its Significance To PragmaticsinventionjournalsNo ratings yet
- Ch11-Dynamic Behavior & Stability of Closed-Loop Control System.Document15 pagesCh11-Dynamic Behavior & Stability of Closed-Loop Control System.Mark GoodmoreNo ratings yet
- Linear Quadratic (LQG) ControlDocument18 pagesLinear Quadratic (LQG) ControlbalkyderNo ratings yet
- Pole-Placement by State-Space MethodsDocument36 pagesPole-Placement by State-Space MethodsbalkyderNo ratings yet
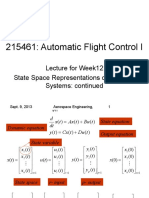
- Automatic Flight Control State Space ModelsDocument73 pagesAutomatic Flight Control State Space ModelsNumkang KangNo ratings yet
- System TheoryDocument17 pagesSystem TheoryMichael CampbellNo ratings yet
- State Variable Analysis: Birla Vishwakarma MahavidyalayaDocument17 pagesState Variable Analysis: Birla Vishwakarma Mahavidyalayavani100% (1)
- M475 - c2 - L3 - Digital Control SystemsDocument8 pagesM475 - c2 - L3 - Digital Control SystemsAli AlmakhmariNo ratings yet
- Sistem Kendali Digital Program S1 Departemen Elektro FTUIDocument53 pagesSistem Kendali Digital Program S1 Departemen Elektro FTUIMuhammad SyifaNo ratings yet
- SS Models and Discrete RealizationsDocument10 pagesSS Models and Discrete RealizationssunilsahadevanNo ratings yet
- Ch7 Analysis+of+First +and+second Order+Transient+CircuitsDocument12 pagesCh7 Analysis+of+First +and+second Order+Transient+Circuits김종혁No ratings yet
- LQG LTR Controller Design For An Aircraft ModelDocument12 pagesLQG LTR Controller Design For An Aircraft Modelantex nebyuNo ratings yet
- Phy 102Document41 pagesPhy 102hannanspam34No ratings yet
- Isothermal Reactor Design AlgorithmDocument99 pagesIsothermal Reactor Design AlgorithmLily Antonette AgustinNo ratings yet
- Topic09 ReviewedDocument3 pagesTopic09 Reviewedsuper junlinNo ratings yet
- Modeling in The Time DomainDocument11 pagesModeling in The Time DomainRilwanNo ratings yet
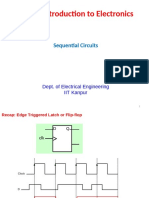
- Esc201: Introducton To Electronics: Sequental CircuitsDocument34 pagesEsc201: Introducton To Electronics: Sequental CircuitssomeshNo ratings yet
- Equations of Motion for Spring-Loaded SystemsDocument2 pagesEquations of Motion for Spring-Loaded SystemsFaDh MiZiNo ratings yet
- Lecture 5Document19 pagesLecture 5Animesh Kumar JhaNo ratings yet
- Sensors: Read Chapter 2 of TextbookDocument102 pagesSensors: Read Chapter 2 of TextbookJanelle Gil MallariNo ratings yet
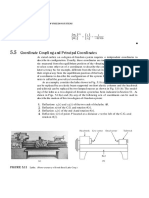
- Principal CoordinatesDocument6 pagesPrincipal CoordinatesDanielNo ratings yet
- Lecture Summary: Markov Jump Linear Systems: Vijay Gupta and Richard M. MurrayDocument3 pagesLecture Summary: Markov Jump Linear Systems: Vijay Gupta and Richard M. MurrayParfumerie Actu'ElleNo ratings yet
- Formula Sheet and Tables For Heat Transfer Mwx410Document35 pagesFormula Sheet and Tables For Heat Transfer Mwx410Cornelis A KoetsierNo ratings yet
- Minimum variance control propertiesDocument39 pagesMinimum variance control propertiesbalkyderNo ratings yet
- Discrete-Time Systems: Discretization, Models and Their PropertiesDocument66 pagesDiscrete-Time Systems: Discretization, Models and Their PropertiesbalkyderNo ratings yet
- A Comparative Advantage Model in A Neoclassical WorldDocument17 pagesA Comparative Advantage Model in A Neoclassical Worldahmedbaba111No ratings yet
- Contracts and Vertical FDI: Instructor: Thomas Chaney Econ 357 - International Trade (PH.D.)Document6 pagesContracts and Vertical FDI: Instructor: Thomas Chaney Econ 357 - International Trade (PH.D.)Hector Perez SaizNo ratings yet
- Chapter 3 Part IDocument68 pagesChapter 3 Part IDaniel MengeshaNo ratings yet
- Process Control 5Document21 pagesProcess Control 5Mohamad AbdelkaderNo ratings yet
- Filip FlopsDocument4 pagesFilip FlopsMohammed JeelanNo ratings yet
- State Feedback Control for Pole PlacementDocument17 pagesState Feedback Control for Pole PlacementcallsandhyaNo ratings yet
- 4b TransitionstateDocument26 pages4b TransitionstateLatifah FauziahNo ratings yet
- Heat Transfer Analysis: Heat Conduction With ConvectionDocument9 pagesHeat Transfer Analysis: Heat Conduction With ConvectionRed JohnNo ratings yet
- Department of Physics, IITM: L H P Ur M RDocument3 pagesDepartment of Physics, IITM: L H P Ur M RMorodirNo ratings yet
- EEE 102, Chapter 7 - Part 1Document8 pagesEEE 102, Chapter 7 - Part 1DenizNo ratings yet
- ECCE302 Tutorial 02 SolutionDocument5 pagesECCE302 Tutorial 02 SolutionAlbert AllenNo ratings yet
- Modern Control: Dr.-Ing. Erwin Sitompul President UniversityDocument21 pagesModern Control: Dr.-Ing. Erwin Sitompul President UniversityIan John MontalboNo ratings yet
- MOOC Assignment-3 Answers PDFDocument15 pagesMOOC Assignment-3 Answers PDFvamshiNo ratings yet
- Isothermal Reactor DesignDocument99 pagesIsothermal Reactor DesignabrhshNo ratings yet
- Solution of Discrete Time State Equations: EE-601: Linear System TheoryDocument42 pagesSolution of Discrete Time State Equations: EE-601: Linear System TheorysunilsahadevanNo ratings yet
- Block Diagram and Transfer FunctionsDocument20 pagesBlock Diagram and Transfer FunctionsBatuhan Mutlugil 'Duman'No ratings yet
- PCE6101 Linear Systems Theory: (Tracking Controller Design)Document31 pagesPCE6101 Linear Systems Theory: (Tracking Controller Design)Birhex FeyeNo ratings yet
- Time Domain Response of Second Order Linear CircuitsDocument15 pagesTime Domain Response of Second Order Linear CircuitsMOHSINALI MOMINNo ratings yet
- Chapter2 Part C ModifiedDocument36 pagesChapter2 Part C Modifiedabed salemNo ratings yet
- Time Domain For Second OrderDocument15 pagesTime Domain For Second OrderDharamNo ratings yet
- Cylinder Wall Heat Transfer GuideDocument8 pagesCylinder Wall Heat Transfer GuideCllyan ReyesNo ratings yet
- Flip Flop ExperimentDocument5 pagesFlip Flop ExperimentDeepak KumbharNo ratings yet
- Formula RioDocument9 pagesFormula RioMelissa Del RosalNo ratings yet
- Lecture 2 Robust and Optimal ControlDocument7 pagesLecture 2 Robust and Optimal ControlRoger BertranNo ratings yet
- Control L2aDocument17 pagesControl L2avibhore mendirattaNo ratings yet
- Lec - 5 - Modeling of Electrical SystemsDocument33 pagesLec - 5 - Modeling of Electrical SystemsMaryam BhattiNo ratings yet
- sns_2021_기말(온라인)Document2 pagessns_2021_기말(온라인)juyeons0204No ratings yet
- Mechanical Systems: Translational RotationalDocument30 pagesMechanical Systems: Translational RotationalHussainNo ratings yet
- HW01 SolDocument11 pagesHW01 Solthehighlife1080100% (1)
- Chapter 4.1 Response Ist Order SystemsDocument35 pagesChapter 4.1 Response Ist Order SystemsShah AdnanNo ratings yet
- Dynamic Programming and Linear Quadratic (LQ) Control (Discrete-Time and Continuous Time Cases)Document53 pagesDynamic Programming and Linear Quadratic (LQ) Control (Discrete-Time and Continuous Time Cases)balkyderNo ratings yet
- 1 - Memory Unit - Flip-Flops (DLP-2021-22)Document15 pages1 - Memory Unit - Flip-Flops (DLP-2021-22)SohneaNo ratings yet
- 1 - Memory Unit - Flip-Flops (DLP-2021-22)Document15 pages1 - Memory Unit - Flip-Flops (DLP-2021-22)SohneaNo ratings yet
- Formulario Mate IIDocument5 pagesFormulario Mate IIÁngel Flores HernándezNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- D4Nfyt Payment Details: FlightDocument2 pagesD4Nfyt Payment Details: FlightJan SilalahiNo ratings yet
- Demonstration-Based Training (DBT) in The Design of A Video Tutorial For Software TrainingDocument16 pagesDemonstration-Based Training (DBT) in The Design of A Video Tutorial For Software TrainingJan SilalahiNo ratings yet
- Ijere Journal Bics Al Hibra 1pdfDocument4 pagesIjere Journal Bics Al Hibra 1pdfJan SilalahiNo ratings yet
- 1213-Article Text-3133-2-10-20201106Document7 pages1213-Article Text-3133-2-10-20201106Jan SilalahiNo ratings yet
- CHE3162.Lecture11 CascadeDocument33 pagesCHE3162.Lecture11 Cascadexhche7No ratings yet
- IM Appendix C UCL Verification Ed12Document34 pagesIM Appendix C UCL Verification Ed12Chong Fong KimNo ratings yet
- Sign Language Recognition Using Machine LearningDocument7 pagesSign Language Recognition Using Machine LearningIJRASETPublicationsNo ratings yet
- Dark Web Image Classification Using Quantum Convolutional Neural NetworkDocument5 pagesDark Web Image Classification Using Quantum Convolutional Neural NetworkAakash WagleNo ratings yet
- Fraud Detection System: - Nikita Lawande - Prakarsha Dahat - Riya ThakurDocument14 pagesFraud Detection System: - Nikita Lawande - Prakarsha Dahat - Riya ThakurackrinNo ratings yet
- Comparison of Fuzzy-PID and PID Controller For Speed Control ofDocument9 pagesComparison of Fuzzy-PID and PID Controller For Speed Control ofLêNhậtMinhNo ratings yet
- cs231n 2018 Midterm Review-2 PDFDocument86 pagescs231n 2018 Midterm Review-2 PDFVard FarrellNo ratings yet
- State Estimation and Linear Observers: Automatic Control 1Document13 pagesState Estimation and Linear Observers: Automatic Control 1Peker KocakNo ratings yet
- Minerals: Image Process of Rock Size Distribution Using Dexined-Based Neural NetworkDocument13 pagesMinerals: Image Process of Rock Size Distribution Using Dexined-Based Neural NetworkPatricio Alejandro Navarrete CuevasNo ratings yet
- CA Assignment TwoDocument4 pagesCA Assignment Twoking TommyNo ratings yet
- Expert Systems Past Papers CombinedDocument44 pagesExpert Systems Past Papers CombinedGerryNo ratings yet
- A Comprehensive Review On Vision-Based Violence Detection in Surveillance Videos 2023Document44 pagesA Comprehensive Review On Vision-Based Violence Detection in Surveillance Videos 2023INTTICNo ratings yet
- FME 326 - Module 5 - Signal Flow and Block Diagram ModelsDocument47 pagesFME 326 - Module 5 - Signal Flow and Block Diagram ModelsJesse Jon FerolinoNo ratings yet
- Fuzzytech Crane SimulationDocument27 pagesFuzzytech Crane SimulationMomi Tza100% (1)
- Ieee Computationalintelligence 202108userupload - inDocument100 pagesIeee Computationalintelligence 202108userupload - inAlberto Delisau PizarroNo ratings yet
- Pattern Recognition and Human Language Technology: Research CenterDocument10 pagesPattern Recognition and Human Language Technology: Research CenterLUISNo ratings yet
- Decision Tree Model for Diabetes ClassificationDocument28 pagesDecision Tree Model for Diabetes ClassificationM. Talha NadeemNo ratings yet
- Data Science Checklist For AIOps ApplicationsDocument8 pagesData Science Checklist For AIOps ApplicationsrhenancfdnNo ratings yet
- Chapter 7: Data Modeling Using The Entity-Relationship (Er) ModelDocument2 pagesChapter 7: Data Modeling Using The Entity-Relationship (Er) Modelأدهم مباركNo ratings yet
- Music Suggestion Expert System FinalDocument9 pagesMusic Suggestion Expert System FinaleliasNo ratings yet
- ECE210 Control Systems EngineeringDocument2 pagesECE210 Control Systems EngineeringSaurabhBisht67% (3)
- Read 9781412952378 Theorizing Communication Readings Across Traditi EbookDocument3 pagesRead 9781412952378 Theorizing Communication Readings Across Traditi EbookRDSW ART50% (2)
- Adversarial Attacks and Defenses in Machine Learning-Powered Networks: A Contemporary SurveyDocument46 pagesAdversarial Attacks and Defenses in Machine Learning-Powered Networks: A Contemporary SurveysofistameemNo ratings yet
- V3I5201499a84 PDFDocument6 pagesV3I5201499a84 PDFRachnaNo ratings yet
- Deep Learning For Prediction of Depressive Symptoms in A Large Textual DatasetDocument24 pagesDeep Learning For Prediction of Depressive Symptoms in A Large Textual DatasetAmith PrasanthNo ratings yet
- Decision Tree Algorithm Tutorial With Example in RDocument23 pagesDecision Tree Algorithm Tutorial With Example in Rgouthamk5151No ratings yet
- Irjet V3i3149Document7 pagesIrjet V3i3149john manNo ratings yet
- Classification and PredictionDocument126 pagesClassification and PredictionSonal SinghNo ratings yet
- JAIPURI INSTITUTE OF MANAGEMENT, NOIDA BA 501: Text AnalyticsDocument2 pagesJAIPURI INSTITUTE OF MANAGEMENT, NOIDA BA 501: Text AnalyticsTanisha AgarwalNo ratings yet