You might also like
- Firelights PDFDocument2 pagesFirelights PDFEFG EFGNo ratings yet
- Operation and Maintenance of Power Plant PDFDocument31 pagesOperation and Maintenance of Power Plant PDFwonderstrikeNo ratings yet
- Egyptian Town PlanningDocument43 pagesEgyptian Town PlanningAbhishek Venkitaraman Iyer96% (23)
- International ArbitrageDocument24 pagesInternational Arbitrageaadis191No ratings yet
- Contact Hours Per Week L - Lecture Hour, T - Tutorial Hour, P - Practical HourDocument28 pagesContact Hours Per Week L - Lecture Hour, T - Tutorial Hour, P - Practical HourSk IsmailNo ratings yet
- MathDocument1 pageMathDiya AwasthiNo ratings yet
- B.Tech 1st and 2nd Year (All)Document15 pagesB.Tech 1st and 2nd Year (All)Ashish Ranjan SinghNo ratings yet
- BSc. (PCM), BSc. (PCM+B.Ed) Mathematics Course DocumentsDocument18 pagesBSc. (PCM), BSc. (PCM+B.Ed) Mathematics Course Documentssachin81185No ratings yet
- EMAT102L Course HandoutDocument3 pagesEMAT102L Course HandoutSukrit ChatterjeeNo ratings yet
- Mathematics IIIDocument2 pagesMathematics IIIjahnvibhattNo ratings yet
- Eng Math I Course OutlineDocument2 pagesEng Math I Course OutlineTuhafeni HailekaNo ratings yet
- Outlines - and - Course - Plan - For - Differential - EquationsDocument3 pagesOutlines - and - Course - Plan - For - Differential - EquationsMOHAMMAD ABUBAKAR ATIQNo ratings yet
- Computational Mathematics NotesDocument129 pagesComputational Mathematics NotessatishNo ratings yet
- Differential EquationDocument4 pagesDifferential Equationkrunal02895No ratings yet
- Boundary Value Problems, 6th Ed., Prentice Hall, 2008.: ST NDDocument9 pagesBoundary Value Problems, 6th Ed., Prentice Hall, 2008.: ST NDwkpfckgwNo ratings yet
- HandoutDocument4 pagesHandoutTanay KochrekarNo ratings yet
- 113UST台聯大【電機類】考科綱要及參考書目-2Document7 pages113UST台聯大【電機類】考科綱要及參考書目-2toad0723.ee10No ratings yet
- Maths for Engineers - Calculus, Transforms, PDEsDocument2 pagesMaths for Engineers - Calculus, Transforms, PDEsChaitanya CheyNo ratings yet
- Math A CourseDocument3 pagesMath A CourseMuhammad AhmadNo ratings yet
- C105-Partial Differential Equations PDFDocument2 pagesC105-Partial Differential Equations PDFprajwal rayaNo ratings yet
- Gujarat Technological University: Civil & Infrastructure EngineeringDocument3 pagesGujarat Technological University: Civil & Infrastructure EngineeringRavi SidhpuriaNo ratings yet
- CIVIL ENGINEERING Curriculum PDFDocument178 pagesCIVIL ENGINEERING Curriculum PDFChirag N PatelNo ratings yet
- B Tech First Year Maths CoursesDocument10 pagesB Tech First Year Maths CoursesAlsece PaagalNo ratings yet
- 213 MathematicsDocument7 pages213 MathematicsNidhi JhaNo ratings yet
- MAKAUT Mathematics III SyllabusDocument2 pagesMAKAUT Mathematics III SyllabusRTET Plagiarism CheckNo ratings yet
- HandoutDocument4 pagesHandoutyashNo ratings yet
- Second SemDocument18 pagesSecond Semsenthil kumarNo ratings yet
- MAT115 Differential-And-Difference-Equations ETH 1 AC34Document2 pagesMAT115 Differential-And-Difference-Equations ETH 1 AC34Karan DesaiNo ratings yet
- SyllabusDocument2 pagesSyllabusNaveen GuptaNo ratings yet
- Thapar Uni versity Math-IIDocument1 pageThapar Uni versity Math-IIVAREESH BAINWALANo ratings yet
- Department of Mathematics Indian Institute of Technology PatnaDocument8 pagesDepartment of Mathematics Indian Institute of Technology PatnaGargi SarkarNo ratings yet
- BSC (Math) Annual System SyllabusDocument13 pagesBSC (Math) Annual System Syllabusmakreal50% (2)
- Diff. Eq. (Cal-II) - CS Outline-OBE (Format) - Spring-19Document4 pagesDiff. Eq. (Cal-II) - CS Outline-OBE (Format) - Spring-19Eman IshaqNo ratings yet
- Engineering Mathematics I Course OutcomesDocument2 pagesEngineering Mathematics I Course OutcomesGUNDAM VENU GOPAL REDDY, CSE2020 Vel Tech, ChennaiNo ratings yet
- GGGGDocument28 pagesGGGGShubham MishraNo ratings yet
- MATH-101 - Calculus Analytical Geometry (OBE) Fall 2018Document4 pagesMATH-101 - Calculus Analytical Geometry (OBE) Fall 2018Skiwordy MediaNo ratings yet
- MATH-101 - Calculus Analytical Geometry (OBE) Fall 2018Document5 pagesMATH-101 - Calculus Analytical Geometry (OBE) Fall 2018Usama KhurshidNo ratings yet
- Applied Mathematics SyllabusDocument3 pagesApplied Mathematics SyllabuskarnikaNo ratings yet
- Descrete QUANTUMDocument261 pagesDescrete QUANTUMNitesh pandey100% (1)
- De ZG535Document8 pagesDe ZG535Raaj ThevarNo ratings yet
- Mathmatics Syllabus1Document4 pagesMathmatics Syllabus1Rishi JhaNo ratings yet
- Calculus Schedule TopicsDocument2 pagesCalculus Schedule TopicsSoft TechNo ratings yet
- MA 201 Mathematics-III (3-1-0-8) : TextbooksDocument1 pageMA 201 Mathematics-III (3-1-0-8) : TextbooksABINASH PANDANo ratings yet
- CSE245 - Discrete StructuresDocument4 pagesCSE245 - Discrete StructuresNaashit HashmiNo ratings yet
- 1-Text Book For Class IX: NCERT 2 - Exemplar Problems For Class IX: NCERT 3 - Lab Manual: Mathematics, Secondary Stage: NCERTDocument7 pages1-Text Book For Class IX: NCERT 2 - Exemplar Problems For Class IX: NCERT 3 - Lab Manual: Mathematics, Secondary Stage: NCERTpmgamingNo ratings yet
- Maths F113 HandoutDocument3 pagesMaths F113 HandoutHari KrushnaNo ratings yet
- Matrices:: Mathematical Physics IV (PHHT-411)Document5 pagesMatrices:: Mathematical Physics IV (PHHT-411)Pawan NayakNo ratings yet
- I MSC DSA SyllDocument27 pagesI MSC DSA SyllADNAN HASHMINo ratings yet
- Syllabus First Year First SemesterDocument7 pagesSyllabus First Year First Semestersnehasispal.spNo ratings yet
- Advanced Engineering MathematicsDocument2 pagesAdvanced Engineering MathematicsSASWATA DASGUPTANo ratings yet
- HandoutDocument4 pagesHandoutPrinshu RawatNo ratings yet
- NMICEDocument2 pagesNMICEDhwanikNo ratings yet
- R18 B.Tech ECE MA401BS Laplace Transforms Numerical Methods Complex VariablesDocument2 pagesR18 B.Tech ECE MA401BS Laplace Transforms Numerical Methods Complex VariablesK Sudha0% (1)
- Gujarat Technological University: Advance Engineering Maths B.E. 3 SemesterDocument4 pagesGujarat Technological University: Advance Engineering Maths B.E. 3 SemesterPRASHANT PATELNo ratings yet
- AKTU Syllabus CS 3rd YrDocument2 pagesAKTU Syllabus CS 3rd YrPPDC NAGAURNo ratings yet
- Computational Methods for Mechanical EngineersDocument3 pagesComputational Methods for Mechanical EngineersBhavesh PatelNo ratings yet
- M4 ECE&EEE SyllabusDocument5 pagesM4 ECE&EEE SyllabusBhushan AnnepuNo ratings yet
- Handout TMA 306Document5 pagesHandout TMA 306mm8871No ratings yet
- Mathematics R 18Document31 pagesMathematics R 18VigneshNo ratings yet
- Birla Institute of Technology & Science, Pilani Work Integrated Learning ProgrammesDocument7 pagesBirla Institute of Technology & Science, Pilani Work Integrated Learning ProgrammesGopal KrishnanNo ratings yet
- GSN1224: Linear Algebra and Differential Equations: Knowledge Area: Natural / General ScienceDocument5 pagesGSN1224: Linear Algebra and Differential Equations: Knowledge Area: Natural / General SciencekhizarNo ratings yet
- Birla Institute of Technology & Science, Pilani Work Integrated Learning ProgrammesDocument7 pagesBirla Institute of Technology & Science, Pilani Work Integrated Learning ProgrammesAnuNo ratings yet
- Stevens' Handbook of Experimental Psychology and Cognitive Neuroscience, MethodologyFrom EverandStevens' Handbook of Experimental Psychology and Cognitive Neuroscience, MethodologyNo ratings yet
- ComparisonofAxialLoadonColumn FormattedPaperDocument7 pagesComparisonofAxialLoadonColumn FormattedPaperVictor Omotoriogun100% (1)
- 10m High Gabion Retaining Wall AnlysisDocument33 pages10m High Gabion Retaining Wall Anlysisjonathan chandaNo ratings yet
- 1B 2 3 3b 44' 4a 5 5a 6 6a 7 7a8 8a9: Main BuildingDocument1 page1B 2 3 3b 44' 4a 5 5a 6 6a 7 7a8 8a9: Main BuildingVictor OmotoriogunNo ratings yet
- Structural Analysis & Design of Steel Portal FramesDocument1 pageStructural Analysis & Design of Steel Portal FramesVictor OmotoriogunNo ratings yet
- Understanding Existing Buildings Five Studies To Complete Before Design Work StartsDocument4 pagesUnderstanding Existing Buildings Five Studies To Complete Before Design Work StartsJosh AmuraoNo ratings yet
- UntitledDocument2 pagesUntitledVictor OmotoriogunNo ratings yet
- How To Analyze Existing BuildingsDocument2 pagesHow To Analyze Existing BuildingsVictor OmotoriogunNo ratings yet
- What Can You Do If You Are Convinced A Structure Will Work But Cant Prove It To CodeDocument5 pagesWhat Can You Do If You Are Convinced A Structure Will Work But Cant Prove It To CodeVictor OmotoriogunNo ratings yet
- Boq For Proposed 5M Retaining Wall: Table 1: ExcavationDocument2 pagesBoq For Proposed 5M Retaining Wall: Table 1: ExcavationVictor OmotoriogunNo ratings yet
- Why Do Buildings Fall Down in NigeriaDocument2 pagesWhy Do Buildings Fall Down in NigeriaVictor OmotoriogunNo ratings yet
- Notes on building construction detailsDocument1 pageNotes on building construction detailsVictor OmotoriogunNo ratings yet
- Chapter9 CulvertsDocument92 pagesChapter9 CulvertsVictor OmotoriogunNo ratings yet
- Is 1852 1985Document31 pagesIs 1852 1985pavan_03No ratings yet
- Structural Design Calculation FOR PROPOSED Shopping: AddressDocument59 pagesStructural Design Calculation FOR PROPOSED Shopping: AddressVictor OmotoriogunNo ratings yet
- Revisedpaper WithtitleDocument35 pagesRevisedpaper WithtitleVictor OmotoriogunNo ratings yet
- Design of Cellular Rafts Foundations 1Document17 pagesDesign of Cellular Rafts Foundations 1Victor OmotoriogunNo ratings yet
- Charbel School Ventures RoofDocument1 pageCharbel School Ventures RoofVictor OmotoriogunNo ratings yet
- List of EuipmentsDocument1 pageList of EuipmentsVictor OmotoriogunNo ratings yet
- Terrace SlabLayoutDocument1 pageTerrace SlabLayoutVictor OmotoriogunNo ratings yet
- ColumnsDocument1 pageColumnsVictor OmotoriogunNo ratings yet
- BoQ For RFQ 1 2 Culverts Revised PDFDocument2 pagesBoQ For RFQ 1 2 Culverts Revised PDFAbdurezak AbdurehimNo ratings yet
- Structural Aspects of Selecting A Plane Steel TrussDocument9 pagesStructural Aspects of Selecting A Plane Steel TrussVictor OmotoriogunNo ratings yet
- Final Foundation Drawing GuzapeDocument4 pagesFinal Foundation Drawing GuzapeVictor OmotoriogunNo ratings yet
- BaseDocument1 pageBaseVictor OmotoriogunNo ratings yet
- Design of Steel Elements For Axial Compression To Ec3 2 1Document7 pagesDesign of Steel Elements For Axial Compression To Ec3 2 1Victor OmotoriogunNo ratings yet
- Executive Home Floor PlansDocument4 pagesExecutive Home Floor PlansVictor OmotoriogunNo ratings yet
- BoQ For RFQ 1 2 Culverts Revised PDFDocument2 pagesBoQ For RFQ 1 2 Culverts Revised PDFAbdurezak AbdurehimNo ratings yet
- Warren DetailDocument1 pageWarren DetailVictor OmotoriogunNo ratings yet
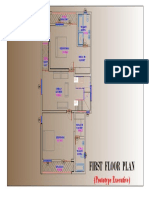
- First Floor Plan: (Prototype Executive)Document1 pageFirst Floor Plan: (Prototype Executive)Victor OmotoriogunNo ratings yet
- Top & Bottom Slab Layout: Section B-BDocument2 pagesTop & Bottom Slab Layout: Section B-BVictor OmotoriogunNo ratings yet
- Reg0000007635187Document2 pagesReg0000007635187Amal JimmyNo ratings yet
- Satelec X Mind DC Brochure enDocument133 pagesSatelec X Mind DC Brochure enAndres Alberto Sanchez LaraNo ratings yet
- Translation Task 1Document5 pagesTranslation Task 1Beatrice FontanaNo ratings yet
- Aesseal Capi Dual SealDocument2 pagesAesseal Capi Dual SealSulaiman Kadher KNo ratings yet
- ExxonMobil History, Strategies, and Financial PerformanceDocument50 pagesExxonMobil History, Strategies, and Financial PerformanceJose FrancisNo ratings yet
- Plates of The Dinosaur Stegosaurus - Forced Convection Heat Loos FinsDocument3 pagesPlates of The Dinosaur Stegosaurus - Forced Convection Heat Loos FinsJuan Fernando Cano LarrotaNo ratings yet
- Week 14 - LECTURE ACTIVITY 14 - Metamorphic RX Key ConceptsDocument4 pagesWeek 14 - LECTURE ACTIVITY 14 - Metamorphic RX Key ConceptsJessel Razalo BunyeNo ratings yet
- Core Java AdvancedDocument103 pagesCore Java AdvancedRavi Chandra Reddy MuliNo ratings yet
- 37LG5500Document33 pages37LG5500Toni011973No ratings yet
- Issues in Microprocessor and Multimicroprocessor Systems - Veljko MilutinivicDocument240 pagesIssues in Microprocessor and Multimicroprocessor Systems - Veljko MilutinivicMirko MirkovicNo ratings yet
- Isla, Julie Anne - Midterm Exam - RM (25 April 2021)Document7 pagesIsla, Julie Anne - Midterm Exam - RM (25 April 2021)Julie anne IslaNo ratings yet
- RNYM02-1120A-12Document2 pagesRNYM02-1120A-12bastian silvaNo ratings yet
- EZPC/SC FAQ Covers Installation and Use of Smart Card ReadersDocument7 pagesEZPC/SC FAQ Covers Installation and Use of Smart Card ReadersDjuroLjPosticNo ratings yet
- Job DescriptionDocument4 pagesJob Descriptionnafis hasnayenNo ratings yet
- China's Lenovo: A Case Study in Competitiveness and Global SuccessDocument3 pagesChina's Lenovo: A Case Study in Competitiveness and Global SuccessIlse Torres100% (2)
- Marking Scheme Bio Paper 3 07Document16 pagesMarking Scheme Bio Paper 3 07genga100% (1)
- Project management software and techniquesDocument2 pagesProject management software and techniquesbinduannNo ratings yet
- NRSG 5800 SyllabusDocument5 pagesNRSG 5800 Syllabusapi-310557802No ratings yet
- CriticalAppraisalWorksheetTherapy EffectSizeDocument2 pagesCriticalAppraisalWorksheetTherapy EffectSizeFitriArdiningsihNo ratings yet
- SGM41542YTQF24G Ic Carga Moto g22Document47 pagesSGM41542YTQF24G Ic Carga Moto g22Gilson PereiraNo ratings yet
- Milk ManualsDocument18 pagesMilk ManualsLAKSHYA VERMA0% (1)
- Man 040 0001Document42 pagesMan 040 0001arturo tuñoque effioNo ratings yet
- Project E: The Hubble LawDocument14 pagesProject E: The Hubble LawVanessa MaynardNo ratings yet
- Vinamilk - Group 5Document13 pagesVinamilk - Group 5trinhhai09062003No ratings yet
- BBVA OpenMind Book Change 19 Key Essays On How Internet Is Changing Our Lives Technology Internet InnovationDocument7 pagesBBVA OpenMind Book Change 19 Key Essays On How Internet Is Changing Our Lives Technology Internet InnovationSissiErricoNo ratings yet
- Best Clinical Embryology Courses in MaduraiDocument8 pagesBest Clinical Embryology Courses in MaduraiVaramreprogenesisNo ratings yet