You might also like
- Lecture 6 - Feed Forward and Ratio ControlDocument24 pagesLecture 6 - Feed Forward and Ratio ControlSurendra Louis Dupuis NaikerNo ratings yet
- Advanced Control Seborg Chapter 15 16Document43 pagesAdvanced Control Seborg Chapter 15 16Akhil Tiwari0% (1)
- Control StrategyDocument44 pagesControl StrategyAyunie FazlinNo ratings yet
- Instrumentation and Process Control (IPC)Document35 pagesInstrumentation and Process Control (IPC)M Arslan AshrafNo ratings yet
- Control Inrtroduction ADocument48 pagesControl Inrtroduction Arhm 018No ratings yet
- Instrumentation and Process Control (IPC) : by Dr. Sikander Rafiq Department of Chemical EngineeringDocument46 pagesInstrumentation and Process Control (IPC) : by Dr. Sikander Rafiq Department of Chemical EngineeringUmar ShehroozNo ratings yet
- Process Control: Designing Process and Control Systems For Dynamic PerformanceDocument42 pagesProcess Control: Designing Process and Control Systems For Dynamic PerformanceMercy JohnNo ratings yet
- Feedback Controller: Proportional, Integral, Derivative (PID)Document34 pagesFeedback Controller: Proportional, Integral, Derivative (PID)Ereen100% (1)
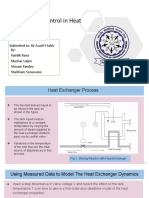
- Temperature Control in Heat ExchangerDocument26 pagesTemperature Control in Heat ExchangerGokul SinghNo ratings yet
- Chapter 15Document37 pagesChapter 15Joy Prokash RoyNo ratings yet
- Chap 15 Marlin 2002Document49 pagesChap 15 Marlin 2002Audrey Patrick KallaNo ratings yet
- Feed-Forward and Ratio Control: CHME 624 Advance Process Dynamic Modelling & ControlDocument13 pagesFeed-Forward and Ratio Control: CHME 624 Advance Process Dynamic Modelling & Controlali aljifriNo ratings yet
- Chapter 1Document39 pagesChapter 1Jay SableNo ratings yet
- Chap 14Document22 pagesChap 14RajendraNo ratings yet
- Chapter Two: Controller PrinciplesDocument34 pagesChapter Two: Controller PrinciplesBekaluNo ratings yet
- 15.el Algoritmo de Control PIDDocument44 pages15.el Algoritmo de Control PIDYulieth BravoNo ratings yet
- Process Control LoopsDocument40 pagesProcess Control LoopsjohnNo ratings yet
- Classical PidcontrollerDocument83 pagesClassical PidcontrollerEric KamauNo ratings yet
- Chapter 1Document82 pagesChapter 1abdisa767No ratings yet
- Week 10-Feedback ControlDocument34 pagesWeek 10-Feedback ControlMohd Aizad100% (1)
- PIDDocument32 pagesPIDHani Hasan100% (1)
- Part 3: Regulatory ( Stabilizing ) Control: Inventory (Level) Control StructureDocument63 pagesPart 3: Regulatory ( Stabilizing ) Control: Inventory (Level) Control StructuretahermohNo ratings yet
- Chapter 16Document24 pagesChapter 16shodhan shettyNo ratings yet
- VII - P, PI PID ControllersDocument77 pagesVII - P, PI PID ControllersTushit ThakkarNo ratings yet
- WINSEM2023-24 BEIE303L TH VL2023240502899 2024-02-23 Reference-Material-IDocument11 pagesWINSEM2023-24 BEIE303L TH VL2023240502899 2024-02-23 Reference-Material-IAffan AhmmedNo ratings yet
- 2 Automatic ControllersDocument26 pages2 Automatic ControllersCupa no DensetsuNo ratings yet
- Traditional Advanced Control StrategiesDocument48 pagesTraditional Advanced Control Strategiescape iipeNo ratings yet
- Control of Continuous Process: Lecturer: Dr. Shallon StubbsDocument32 pagesControl of Continuous Process: Lecturer: Dr. Shallon StubbsLuther King Ferguson100% (1)
- Control Systems Lect. 4 PIDDocument65 pagesControl Systems Lect. 4 PIDhmaymadNo ratings yet
- Lec03 MotorControlDocument10 pagesLec03 MotorControl.adtmmalNo ratings yet
- Lecture 1 Intro TP Process ControlDocument42 pagesLecture 1 Intro TP Process Controlara_1909No ratings yet
- Please Give Me Your Comment in This Presentation 1639101925Document79 pagesPlease Give Me Your Comment in This Presentation 1639101925Adith Wiendar P PutraNo ratings yet
- Chapter 2 Controller PrincipleDocument61 pagesChapter 2 Controller PrincipleSyahril Syafiq100% (1)
- Chapter 2 Controller PrincipleDocument61 pagesChapter 2 Controller PrincipleHaliza MatsaniNo ratings yet
- L09 Feedback LoopDocument24 pagesL09 Feedback Looptaufiqurrahman mohd yunusNo ratings yet
- Introduction (Cpe501)Document21 pagesIntroduction (Cpe501)AYALEYDENNo ratings yet
- Process Control 5Document33 pagesProcess Control 5jeedNo ratings yet
- Enhanced Single-Loop Control StrategiesDocument26 pagesEnhanced Single-Loop Control Strategiesmeseret sisay100% (1)
- Objectives: - Control Terminology - Types of Controllers - Controls in The Real WorldDocument32 pagesObjectives: - Control Terminology - Types of Controllers - Controls in The Real WorldraghuvarmaNo ratings yet
- Ia&c Unit - IiiDocument23 pagesIa&c Unit - IiiPradhunya KambleNo ratings yet
- Process Control-Lecture 06Document22 pagesProcess Control-Lecture 06mwamba chandaNo ratings yet
- Feedforward and Ratio ControlDocument44 pagesFeedforward and Ratio ControlsekinNo ratings yet
- Feedback Controller TuningDocument23 pagesFeedback Controller Tuningso cool100% (1)
- L17 Feedforward RatioDocument33 pagesL17 Feedforward Ratiotaufiqurrahman mohd yunusNo ratings yet
- PID ControllerDocument16 pagesPID ControllerDevarya ChhibberNo ratings yet
- Ch.5 Flip-Flops and Related DevicesDocument38 pagesCh.5 Flip-Flops and Related DevicesDiane GutierrezNo ratings yet
- Lecture 1 Introduction To Process ControlDocument33 pagesLecture 1 Introduction To Process ControlZena wNo ratings yet
- Transfer FunctionDocument62 pagesTransfer FunctionTam PhamNo ratings yet
- Announcements: - Next Class Is The Course Evaluation - Final Project Related Additional Office HoursDocument33 pagesAnnouncements: - Next Class Is The Course Evaluation - Final Project Related Additional Office HoursFaiz MansurNo ratings yet
- Process Control in Chemical Engineering: Agung Nugroho Universitas PertaminaDocument23 pagesProcess Control in Chemical Engineering: Agung Nugroho Universitas PertaminaShilpya KurniasihNo ratings yet
- Control Strategies: ObjectivesDocument19 pagesControl Strategies: ObjectivesPortia ShilengeNo ratings yet
- CH 16 (1-27-05)Document29 pagesCH 16 (1-27-05)David AlexanderNo ratings yet
- CBB 40104 Chapter 4 (241019)Document35 pagesCBB 40104 Chapter 4 (241019)Mira Lucis CaelumNo ratings yet
- First Slide of Presentation: Geobalance MPD ControlDocument30 pagesFirst Slide of Presentation: Geobalance MPD ControlRuth RuizNo ratings yet
- Design and Tuning of Fuzzy Logic PID ControllerDocument19 pagesDesign and Tuning of Fuzzy Logic PID ControllerPriya BhardwajNo ratings yet
- Chapter 4 Basic Control System Updated Aug 2020 1Document56 pagesChapter 4 Basic Control System Updated Aug 2020 1enge.aqeelNo ratings yet
- Chapter 4 Basic Control System (Updated Aug 2020)Document56 pagesChapter 4 Basic Control System (Updated Aug 2020)Erra ShafiraNo ratings yet
- CEIC3006 Lec 1Document5 pagesCEIC3006 Lec 1Holly YuanNo ratings yet
- Pid-Applied Control Systems (Proportional Plus Integral Plus Derivative Control)Document28 pagesPid-Applied Control Systems (Proportional Plus Integral Plus Derivative Control)hiltoneng100% (1)
- Abstract 2Document2 pagesAbstract 2نزار خيرNo ratings yet
- Seminar by Gajanan R. Hange ROLL NO:B-22: Guide: Prof S. R. KulkarniDocument17 pagesSeminar by Gajanan R. Hange ROLL NO:B-22: Guide: Prof S. R. Kulkarniنزار خيرNo ratings yet
- Reactor Design: (CSTR) "Production of Lactic Acid": Done ByDocument18 pagesReactor Design: (CSTR) "Production of Lactic Acid": Done Byنزار خيرNo ratings yet
- Discussion AbstracDocument1 pageDiscussion Abstracنزار خيرNo ratings yet
- The 2010 Earthquake in HaitiDocument14 pagesThe 2010 Earthquake in Haitiنزار خيرNo ratings yet
- The Re-Refining of Used Lubricating Oil in VehiclsDocument10 pagesThe Re-Refining of Used Lubricating Oil in Vehiclsنزار خيرNo ratings yet
- Recycling of Spent Lubricating Vehicle OilDocument3 pagesRecycling of Spent Lubricating Vehicle Oilنزار خيرNo ratings yet
- Customer Satisfaction On Service Quality in Private Commercial Banking Sector in BangladeshDocument11 pagesCustomer Satisfaction On Service Quality in Private Commercial Banking Sector in BangladeshUmar KhanNo ratings yet
- Lec02 PDFDocument6 pagesLec02 PDFEka MarlyanaNo ratings yet
- Array PseudocodeDocument6 pagesArray PseudocodeMehabunnisaaNo ratings yet
- Description: Reference Counting Is A Form of Automatic Memory Management Where Each Object Has ADocument5 pagesDescription: Reference Counting Is A Form of Automatic Memory Management Where Each Object Has ASubathra Devi MourouganeNo ratings yet
- Alexander Graham - Kronecker Products and Matrix Calculus With ApplicationsDocument129 pagesAlexander Graham - Kronecker Products and Matrix Calculus With ApplicationsErik ZamoraNo ratings yet
- Problem Solving in Mathematics ModuleDocument57 pagesProblem Solving in Mathematics ModuleShela RamosNo ratings yet
- ApmDocument11 pagesApmsreyoshiNo ratings yet
- Extractor For Multi Value Class Characteristic Values Using Function ModuleDocument13 pagesExtractor For Multi Value Class Characteristic Values Using Function ModuleEliseo Abad Camacho CNo ratings yet
- Using Deep Learning To Classify X-Ray Images of Potential Tuberculosis PatientsDocument8 pagesUsing Deep Learning To Classify X-Ray Images of Potential Tuberculosis PatientsDr. Kaushal Kishor SharmaNo ratings yet
- C QuestionDocument32 pagesC QuestionDeepak KumarNo ratings yet
- Fisika InggrisDocument4 pagesFisika InggrisRina AgustinaNo ratings yet
- Masonary Arch BridgesDocument277 pagesMasonary Arch BridgesLakruwanNo ratings yet
- Determining An Enthalpy Change of ReactionDocument7 pagesDetermining An Enthalpy Change of ReactionAntony ProtonotariosNo ratings yet
- Structured Mathematical Modeling of Industrial BoiDocument22 pagesStructured Mathematical Modeling of Industrial BoiAndrey CaroNo ratings yet
- Application of Derivative (AOD)Document24 pagesApplication of Derivative (AOD)Raju SinghNo ratings yet
- Spe 10067 MS PDFDocument21 pagesSpe 10067 MS PDFManuel ChNo ratings yet
- Parametric and Nonparametric Test: By: Sai Prakash MBA Insurance Management Pondicherry UniversityDocument10 pagesParametric and Nonparametric Test: By: Sai Prakash MBA Insurance Management Pondicherry UniversitysureshexecutiveNo ratings yet
- SicpDocument90 pagesSicppcdanenbNo ratings yet
- Reading MathematicsDocument110 pagesReading MathematicsLaili LeliNo ratings yet
- Question CH 4Document6 pagesQuestion CH 4Fahad BataviaNo ratings yet
- Chapter 6 - Differential EquationsDocument33 pagesChapter 6 - Differential Equationsdiktatorimhotep8800No ratings yet
- Ship Stability FormuleDocument12 pagesShip Stability FormuleHaziq Ismail100% (1)
- Determinant Lesson PlanDocument2 pagesDeterminant Lesson PlanMr. Barry R. Grauman100% (3)
- Applications of Fourier SeriesDocument2 pagesApplications of Fourier SeriesMoiz Arif50% (2)
- 2d and 3d Shapes Sequence Lesson PlanDocument7 pages2d and 3d Shapes Sequence Lesson Planapi-534995697100% (1)
- 3rd PrepDocument61 pages3rd Prepmohamed faroukNo ratings yet
- 2023-24 - Work Shop Topics (Sub Topics) Allotments - VSP-Raghu SirDocument23 pages2023-24 - Work Shop Topics (Sub Topics) Allotments - VSP-Raghu SirGowri ShankarNo ratings yet
- How To Curve An Exam and AssignDocument26 pagesHow To Curve An Exam and AssignBroy D BriumNo ratings yet
- State Space RepresentationDocument34 pagesState Space RepresentationMuhammad UsmanNo ratings yet
- Standard-Equation-Of-A-Circle Math 10Document12 pagesStandard-Equation-Of-A-Circle Math 10Maria JocosaNo ratings yet