You might also like
- Lec03 - Processor Structure and FunctionDocument55 pagesLec03 - Processor Structure and FunctionDavid WongNo ratings yet
- CPU Structure & FunctionsDocument44 pagesCPU Structure & FunctionsMohammed UsmanNo ratings yet
- CPU Structure and FunctionsDocument39 pagesCPU Structure and FunctionsNICE ONENo ratings yet
- Group 6 Cpu Design PresentationDocument50 pagesGroup 6 Cpu Design PresentationFerry AriNo ratings yet
- Lecture 5 - CPU DesignDocument20 pagesLecture 5 - CPU Designnoberth nikombolweNo ratings yet
- Unit 2Document60 pagesUnit 2Ashish kumarNo ratings yet
- Processor Organization & Register OrganizationDocument2 pagesProcessor Organization & Register OrganizationAnthony BroñolaNo ratings yet
- Cycle 2Document8 pagesCycle 2ireneNo ratings yet
- Computer System: Operating Systems: Internals and Design PrinciplesDocument62 pagesComputer System: Operating Systems: Internals and Design PrinciplesRamadan ElhendawyNo ratings yet
- COA Lecture 6Document27 pagesCOA Lecture 6Saifi SulehriNo ratings yet
- Computer Arch. & Organization - I: The Basic Organization of ComputersDocument33 pagesComputer Arch. & Organization - I: The Basic Organization of Computerssaksham0506No ratings yet
- CS8493 Operating Systems - Unit IDocument24 pagesCS8493 Operating Systems - Unit ILokesh Srm100% (2)
- Co-2 - CoaDocument46 pagesCo-2 - CoaDAVU REVANTH NAGNo ratings yet
- CPU Structure and FunctionDocument30 pagesCPU Structure and Functiondbunet100% (1)
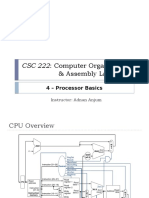
- CSC 222: Computer Organization: & Assembly LanguageDocument22 pagesCSC 222: Computer Organization: & Assembly Languageذیشان چودھریNo ratings yet
- STW120CT Computer Architecture and Networks: (Instruction Pipelining)Document24 pagesSTW120CT Computer Architecture and Networks: (Instruction Pipelining)BJ AcharyaNo ratings yet
- CH2 Processororganizationregisterorganization-160311164856Document16 pagesCH2 Processororganizationregisterorganization-160311164856Vishwas PatangeNo ratings yet
- CSC 222: Computer Organization: & Assembly LanguageDocument22 pagesCSC 222: Computer Organization: & Assembly LanguageAbdul RahmanNo ratings yet
- Module 5Document9 pagesModule 5Saugat TripathiNo ratings yet
- Assignment 7Document11 pagesAssignment 7ajit mhjNo ratings yet
- What Is RegisterDocument2 pagesWhat Is RegisterHaris AkramNo ratings yet
- Computer System: Operating Systems: Internals and Design PrinciplesDocument56 pagesComputer System: Operating Systems: Internals and Design PrinciplesHurrain QueenNo ratings yet
- Unit 2 The CPU and Register Org.Document11 pagesUnit 2 The CPU and Register Org.shashank2001tewariNo ratings yet
- Basic Structure of Computer ArchitectureDocument53 pagesBasic Structure of Computer Architecturenikhilmalagi0% (1)
- Lecture 1 Computer OrgDocument26 pagesLecture 1 Computer OrgmalNo ratings yet
- CPU Structure and Functions: Processor OrganizationDocument5 pagesCPU Structure and Functions: Processor OrganizationShahzadNo ratings yet
- Dlca NOTESDocument5 pagesDlca NOTESFatima HaroonNo ratings yet
- Chapter 2 (Part II) - Instruction Sets (Characteristics and Functions)Document49 pagesChapter 2 (Part II) - Instruction Sets (Characteristics and Functions)Kirubel EsayasNo ratings yet
- CTMT Chap 07.processor Structure and FunctionDocument38 pagesCTMT Chap 07.processor Structure and FunctionTrần Đình Minh KhoaNo ratings yet
- Cpu RegistersDocument4 pagesCpu RegistersHafsa Ahmed 4307No ratings yet
- Draw The Block Diagram of Simple Microprocessor-Based System and Explain The Function of Each Block (You Can Use MS Word or Google Docs)Document8 pagesDraw The Block Diagram of Simple Microprocessor-Based System and Explain The Function of Each Block (You Can Use MS Word or Google Docs)Riza Pahama MananaongNo ratings yet
- William Stallings Computer Organization and Architecture 9 EditionDocument55 pagesWilliam Stallings Computer Organization and Architecture 9 EditionshahbaadshahNo ratings yet
- Google Class Room Code: 07rrbb6Document156 pagesGoogle Class Room Code: 07rrbb6SriganeshNo ratings yet
- Comp - Arch 2334Document4 pagesComp - Arch 2334praveenrangareNo ratings yet
- Chapter 3 Central Processing Unit: 3.1 CPU Organization and StructureDocument8 pagesChapter 3 Central Processing Unit: 3.1 CPU Organization and StructureLui PascherNo ratings yet
- Lecture 3: CPU Structure and FunctionDocument47 pagesLecture 3: CPU Structure and Functionjamespong007No ratings yet
- William Stallings Computer Organization and Architecture: CPU Structure and FunctionDocument40 pagesWilliam Stallings Computer Organization and Architecture: CPU Structure and FunctionreinaldoopusNo ratings yet
- CH14 COA9e Processor Structure and FunctionDocument40 pagesCH14 COA9e Processor Structure and FunctionTuấnNo ratings yet
- Lecture Note - Top Level View of ComputerDocument6 pagesLecture Note - Top Level View of Computertesfu zewduNo ratings yet
- Digital Computer: Hardware SoftwareDocument13 pagesDigital Computer: Hardware SoftwareAshis MeherNo ratings yet
- Green Teal Futuristic Technology PresentationDocument29 pagesGreen Teal Futuristic Technology Presentationquoctuanisme0610No ratings yet
- C Two T C P U (CPU) : Hapter HE Entral Rocessing NITDocument43 pagesC Two T C P U (CPU) : Hapter HE Entral Rocessing NITyohans shegawNo ratings yet
- CENG 365 Microprocessor UENR Unit 1Document65 pagesCENG 365 Microprocessor UENR Unit 1Blessing CheremehNo ratings yet
- OS Module 1.4Document22 pagesOS Module 1.4Aryan JuyalNo ratings yet
- Organisasi Dan Arsitektur Komputer - 8Document18 pagesOrganisasi Dan Arsitektur Komputer - 8YuanserenadaNo ratings yet
- The Central Processing UnitDocument4 pagesThe Central Processing UnitRafena MustaphaNo ratings yet
- Basics of Operating Systems (IT2019-2) : Assignment IVDocument3 pagesBasics of Operating Systems (IT2019-2) : Assignment IVGiang LeNo ratings yet
- Computer ArchitectureDocument13 pagesComputer ArchitectureAbdulQowiyyu OlamilekanNo ratings yet
- Processor Basics: Nizwa College of Technology Department of IT Computer ArchitectureDocument30 pagesProcessor Basics: Nizwa College of Technology Department of IT Computer Architecturealinma76No ratings yet
- Chapter 6-Computer ArchitectureDocument34 pagesChapter 6-Computer ArchitectureVongai MubaiwaNo ratings yet
- Computer Organization and Architecture: Chapter FourDocument43 pagesComputer Organization and Architecture: Chapter FourZerihun BekeleNo ratings yet
- Processor Structure and FunctionDocument55 pagesProcessor Structure and Functionmutia sabrina100% (1)
- Presentation 1Document33 pagesPresentation 1Fredy F RNo ratings yet
- Basic Structure of Computers - 1Document6 pagesBasic Structure of Computers - 1SwatiNo ratings yet
- CS2253 - Computerorganization Architecture-QbDocument54 pagesCS2253 - Computerorganization Architecture-QbVaishnavi RaveNo ratings yet
- Structure of Computers ReviseDocument148 pagesStructure of Computers ReviseAbhishek MNo ratings yet
- Computer Architecture: Ancy Jerald I ST MSC, 2 Sem Dept of Physics ST Xavier'S College ThumbaDocument40 pagesComputer Architecture: Ancy Jerald I ST MSC, 2 Sem Dept of Physics ST Xavier'S College ThumbaFredy F RNo ratings yet
- 1.3.2 Computer Architecture and The Fetch-Execute Cycle PDFDocument4 pages1.3.2 Computer Architecture and The Fetch-Execute Cycle PDFAhmed HassanNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Computer Architecture and Organization: Chapter ThreeDocument42 pagesComputer Architecture and Organization: Chapter ThreeGebrie BeleteNo ratings yet
- New Microsoft Office Word DocumentDocument1 pageNew Microsoft Office Word DocumentGebrie BeleteNo ratings yet
- New Microsoft Office Word DocumentDocument1 pageNew Microsoft Office Word DocumentGebrie BeleteNo ratings yet
- The Complete Collection of Instructions That Are Understood by A CPU Is Called Instruction Set. - It Has Its Own Formats and ElementsDocument17 pagesThe Complete Collection of Instructions That Are Understood by A CPU Is Called Instruction Set. - It Has Its Own Formats and ElementsGebrie BeleteNo ratings yet
- Computer Architecture and Organization: Chapter ThreeDocument26 pagesComputer Architecture and Organization: Chapter ThreeGebrie BeleteNo ratings yet
- Chapter 2 Lecture 6Document30 pagesChapter 2 Lecture 6Gebrie BeleteNo ratings yet
- GECH NT ConfigDocument10 pagesGECH NT ConfigGebrie BeleteNo ratings yet
- Administrative Distances (AD) : Open Shortest Path First Is A Link State and Hierarchical IGP Routing Algorithm. It IsDocument7 pagesAdministrative Distances (AD) : Open Shortest Path First Is A Link State and Hierarchical IGP Routing Algorithm. It IsGebrie BeleteNo ratings yet
- University of Gondar College of Informatics Department of Information TechnologyDocument6 pagesUniversity of Gondar College of Informatics Department of Information TechnologyGebrie BeleteNo ratings yet
- New Microsoft Office Word DocumentDocument1 pageNew Microsoft Office Word DocumentGebrie BeleteNo ratings yet
- Assignment 1: 1: Sensitivity: Internal & RestrictedDocument26 pagesAssignment 1: 1: Sensitivity: Internal & RestrictedHYTDYRUGNo ratings yet
- MQL Buy SellDocument5 pagesMQL Buy SellpanigrahianupamNo ratings yet
- DPSD 20-21 Notes Unit-3Document138 pagesDPSD 20-21 Notes Unit-3Karthick Sivakumar ChellamuthuNo ratings yet
- Java Final Project Documentation (Revision 1)Document12 pagesJava Final Project Documentation (Revision 1)Enrique SiarotNo ratings yet
- Programmer User Manual CF800PROG: Cooper Safety LTDDocument8 pagesProgrammer User Manual CF800PROG: Cooper Safety LTDJoseph YumulNo ratings yet
- IT Certification Roadmap: Certifications Validate Expertise in Your Chosen CareerDocument2 pagesIT Certification Roadmap: Certifications Validate Expertise in Your Chosen Careerarzal farizNo ratings yet
- Electronic QuestionsDocument2 pagesElectronic QuestionsBidisha talukdarNo ratings yet
- Rida MumtazDocument26 pagesRida Mumtazsatyam sharmaNo ratings yet
- Device Retrieval and Data Download ChecklistDocument3 pagesDevice Retrieval and Data Download Checklistrami houjeiryNo ratings yet
- A Developer's Guide To Protecting Memory: Detect and Eliminate Damaging Memory Leaks With ABAP Memory InspectorDocument6 pagesA Developer's Guide To Protecting Memory: Detect and Eliminate Damaging Memory Leaks With ABAP Memory InspectortaletsaraNo ratings yet
- Datasheet: Inteligen NTC BaseboxDocument4 pagesDatasheet: Inteligen NTC BaseboxsantoNo ratings yet
- ZKTeco+Fingerprint+Scanner+SDK+Selection+Guide Ver3.0Document1 pageZKTeco+Fingerprint+Scanner+SDK+Selection+Guide Ver3.0Dracon KnightNo ratings yet
- Dot Net 40 Programming Black BookDocument1 pageDot Net 40 Programming Black BookVaralakshmiNo ratings yet
- Pronest 2021: Cad/Cam Nesting SoftwareDocument4 pagesPronest 2021: Cad/Cam Nesting SoftwareIdelvan de PaulaNo ratings yet
- Revised - Internship Summary ReportDocument10 pagesRevised - Internship Summary ReportAKSHAT ANTALNo ratings yet
- I C 3 Usb Installation SheetDocument2 pagesI C 3 Usb Installation Sheetubenr909No ratings yet
- Dynamic Programming - Set 12 (Longest Palindromic Subsequence) - GeeksforGeeks PDFDocument4 pagesDynamic Programming - Set 12 (Longest Palindromic Subsequence) - GeeksforGeeks PDFTanisha JindalNo ratings yet
- UAlbany UWB StudyDocument34 pagesUAlbany UWB StudySeagul PeekNo ratings yet
- FALLSEM2021-22 CSE3501 ETH VL2021220103869 Reference Material IV 18-10-2021 LEC - 16 - Data BackupDocument908 pagesFALLSEM2021-22 CSE3501 ETH VL2021220103869 Reference Material IV 18-10-2021 LEC - 16 - Data BackupAkhil BhimarasettyNo ratings yet
- Final Exam - English 3 - Revisión Del IntentoDocument30 pagesFinal Exam - English 3 - Revisión Del IntentoJuan ManuelNo ratings yet
- Hacking For Beginners The Complete Guide - Barnes TimDocument48 pagesHacking For Beginners The Complete Guide - Barnes TimPom KanaNo ratings yet
- Extensibility Guide For JIT-EWM IntegrationDocument18 pagesExtensibility Guide For JIT-EWM IntegrationAltamir Nunes JuniorNo ratings yet
- Fall 2022 - CS607 - 2 - MC210200630Document3 pagesFall 2022 - CS607 - 2 - MC210200630Ali MNo ratings yet
- Reconnaisance AttackDocument13 pagesReconnaisance Attackapi-537419578No ratings yet
- Quality For Dev Ops TeamsDocument23 pagesQuality For Dev Ops TeamsWNo ratings yet
- Nintendo Gameboy Architecture and Design: Mitchell Cook and George DayDocument14 pagesNintendo Gameboy Architecture and Design: Mitchell Cook and George DayRay JoshuaNo ratings yet
- Heart Disease Prediction Android ProjectDocument8 pagesHeart Disease Prediction Android ProjectnttznnjwjbNo ratings yet
- KC640 User Manual ENDocument6 pagesKC640 User Manual ENDavidNo ratings yet
- Jupyter Notebook Kernels - How To Add, Change, RemoveDocument8 pagesJupyter Notebook Kernels - How To Add, Change, Removeyou 'n meNo ratings yet
- Unit 2 Solid ModelingDocument26 pagesUnit 2 Solid ModelingMohammed Fakhruddin Hasan NizamiNo ratings yet