You might also like
- PlayStation 2 Architecture: Architecture of Consoles: A Practical Analysis, #12From EverandPlayStation 2 Architecture: Architecture of Consoles: A Practical Analysis, #12No ratings yet
- Hard Disk PPT Tamil.1Document19 pagesHard Disk PPT Tamil.1amuljune0% (3)
- PlayStation Architecture: Architecture of Consoles: A Practical Analysis, #6From EverandPlayStation Architecture: Architecture of Consoles: A Practical Analysis, #6No ratings yet
- Nintendo DS Architecture: Architecture of Consoles: A Practical Analysis, #14From EverandNintendo DS Architecture: Architecture of Consoles: A Practical Analysis, #14No ratings yet
- Text That Girl Cheat Sheet NewDocument25 pagesText That Girl Cheat Sheet NewfhgfghgfhNo ratings yet
- General Mathematics 2nd Quarter ExamDocument3 pagesGeneral Mathematics 2nd Quarter ExamDeped TambayanNo ratings yet
- Shear Wall Design PDFDocument9 pagesShear Wall Design PDFjk.dasgupta100% (2)
- Sega Saturn Architecture: Architecture of Consoles: A Practical Analysis, #5From EverandSega Saturn Architecture: Architecture of Consoles: A Practical Analysis, #5No ratings yet
- Mega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3From EverandMega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3No ratings yet
- Nintendo 64 Architecture: Architecture of Consoles: A Practical Analysis, #8From EverandNintendo 64 Architecture: Architecture of Consoles: A Practical Analysis, #8No ratings yet
- Pavement Design - (Rigid Flexible) DPWHDocument25 pagesPavement Design - (Rigid Flexible) DPWHrekcah ehtNo ratings yet
- Ejb Programe Run On JbossDocument14 pagesEjb Programe Run On JbosspujasaxenaNo ratings yet
- Ins200 Assignment Hazardous PlaceDocument10 pagesIns200 Assignment Hazardous PlaceNur Syafatin Natasya86% (7)
- Fixdisk Detail ConceptsDocument8 pagesFixdisk Detail ConceptsGaurang V LakhaniNo ratings yet
- C11 Disk Drive InterfacesDocument40 pagesC11 Disk Drive InterfacesAmir M. VillasNo ratings yet
- Hard Drive Technologies: © 2007 The Mcgraw-Hill Companies, Inc. All Rights ReservedDocument55 pagesHard Drive Technologies: © 2007 The Mcgraw-Hill Companies, Inc. All Rights ReservedAlana PetersonNo ratings yet
- Hard Drive TechnologyDocument27 pagesHard Drive TechnologyDebashish PalNo ratings yet
- DiskDocument21 pagesDiskErmin HamidovicNo ratings yet
- DiskDocument21 pagesDiskThiyaga RajanNo ratings yet
- Hard Disks: - Low-Level FormatDocument21 pagesHard Disks: - Low-Level Formatعبدالله النجارNo ratings yet
- DiskDocument21 pagesDiskNylma Mae BarceNo ratings yet
- Disksraid 09 PDFDocument44 pagesDisksraid 09 PDFPankaj BharangarNo ratings yet
- Hard DiskDocument3 pagesHard DiskZohaib Khan0% (1)
- Storage: Ratnadeep BhattacharyaDocument61 pagesStorage: Ratnadeep BhattacharyaRatnadeep BhattacharyaNo ratings yet
- MotherboardDocument8 pagesMotherboardSudarsan JaganathanNo ratings yet
- ATA (AT Attachment) : Refers To Any Hard Drive With A Built-InDocument32 pagesATA (AT Attachment) : Refers To Any Hard Drive With A Built-InNitin BirdiNo ratings yet
- Abcs of Disk Drives: Sudhanva GurumurthiDocument40 pagesAbcs of Disk Drives: Sudhanva GurumurthiSultan Salahuddin JokhioNo ratings yet
- 3 Arch and KernelsDocument88 pages3 Arch and KernelsAsabia OmoniyiNo ratings yet
- Lesson 3 ITS 204 Reviewer All About MotherboardsDocument5 pagesLesson 3 ITS 204 Reviewer All About MotherboardsEzzer DaveNo ratings yet
- Lec4 1Document33 pagesLec4 1ASHI KOTHARINo ratings yet
- Abcs of Disk Drives: Kelvin HazaziDocument40 pagesAbcs of Disk Drives: Kelvin HazaziKelvin HazaziNo ratings yet
- Computer Hardware PartsDocument106 pagesComputer Hardware PartsSai Harshitha PeddiNo ratings yet
- ECE/CS 250 Computer Architecture Summer 2021Document40 pagesECE/CS 250 Computer Architecture Summer 2021deepthi.mNo ratings yet
- Welcome To Our Presentation: Hard Disk Drive (HDD) Ofa Computer SystemDocument24 pagesWelcome To Our Presentation: Hard Disk Drive (HDD) Ofa Computer Systemrana.fitconsultancyNo ratings yet
- IT Chapter 1Document10 pagesIT Chapter 1Alice HovsepyanNo ratings yet
- Input-Output Basic (Simplified) I/O ArchitectureDocument3 pagesInput-Output Basic (Simplified) I/O ArchitecturexbabaxNo ratings yet
- (Black Meets Black: Older PC'S) : Notes On PC Assembly Make SAFETY Your First PriorityDocument8 pages(Black Meets Black: Older PC'S) : Notes On PC Assembly Make SAFETY Your First Prioritycyrene_20100% (2)
- Sqlrally Orlando Understanding Storage Systems and SQL ServerDocument38 pagesSqlrally Orlando Understanding Storage Systems and SQL ServerJeyakumar NarasingamNo ratings yet
- HardwareDocument152 pagesHardwareMegha SanghaviNo ratings yet
- Motherboard 2Document13 pagesMotherboard 2sklatzNo ratings yet
- U ProccessorsDocument487 pagesU ProccessorsAndrei Linca-Torje100% (1)
- Motherboard: - Chip SetDocument19 pagesMotherboard: - Chip SetAnkur SinghNo ratings yet
- William Stallings Computer Organization and Architecture 8 EditionDocument55 pagesWilliam Stallings Computer Organization and Architecture 8 EditionflowrentsiaNo ratings yet
- Hardrives: Supporting Hard DrivesDocument84 pagesHardrives: Supporting Hard DrivesJehu MwangiNo ratings yet
- 7 IoDocument57 pages7 IoSanu'Alvaro Abu-abu'sellaLuNo ratings yet
- Chapter 2 MotherboardDocument102 pagesChapter 2 MotherboardratZ_trgNo ratings yet
- Unit 2: Motherboard: Prepared By: Mohd Zuhaimi B ZolkifliDocument111 pagesUnit 2: Motherboard: Prepared By: Mohd Zuhaimi B ZolkifliZuhaimi ZulNo ratings yet
- MODULE5 Mass Storage StrucDocument24 pagesMODULE5 Mass Storage StrucGeetha ShyamsundarNo ratings yet
- Review Quiz 1Document160 pagesReview Quiz 1Luis SandovalNo ratings yet
- Hard Disk Drive: TrainerDocument19 pagesHard Disk Drive: TraineramuljuneNo ratings yet
- How IDE Controllers WorkDocument6 pagesHow IDE Controllers Workapi-19737301No ratings yet
- 07 Input OutputDocument63 pages07 Input OutputJuNaid QaimkhaniNo ratings yet
- 07 - Input OutputDocument62 pages07 - Input OutputAbdukadir AbdullahNo ratings yet
- Computer Hardware: - Zafrin Y. MemonDocument31 pagesComputer Hardware: - Zafrin Y. MemonzafrinmemonNo ratings yet
- 1 - Microcontroller VS Microprocontroller TechnologyDocument35 pages1 - Microcontroller VS Microprocontroller TechnologyVinnoth SrikumarNo ratings yet
- Internal Organization of A PC: MemoryDocument33 pagesInternal Organization of A PC: MemoryPrasath SanthanamNo ratings yet
- MotherboardDocument41 pagesMotherboardjoseph rey ybiosaNo ratings yet
- 04-Chap5-Internal MemoryDocument37 pages04-Chap5-Internal Memoryabdul shakoorNo ratings yet
- Multimedia Storage and RetrievalDocument52 pagesMultimedia Storage and RetrievalManasa GeervaniNo ratings yet
- Hardware Components & CommunicationsDocument21 pagesHardware Components & Communicationskiller3570No ratings yet
- Memory SystemDocument70 pagesMemory SystemritikNo ratings yet
- CSPC 36 3rd Unit 8 NitDocument28 pagesCSPC 36 3rd Unit 8 NitRashika KhannaNo ratings yet
- Hard Drive Types: HDD's and SSD'sDocument10 pagesHard Drive Types: HDD's and SSD'srohitsingh2909No ratings yet
- CH 08Document94 pagesCH 08hey yowNo ratings yet
- A - NotesDocument15 pagesA - NotesapoloNo ratings yet
- Hard DiskDocument41 pagesHard DiskNiti Patel67% (3)
- IT 34 Lateral Entry 1Document6 pagesIT 34 Lateral Entry 1pujasaxenaNo ratings yet
- Final Year Project On Inventory Manageme PDFDocument50 pagesFinal Year Project On Inventory Manageme PDFSunny SrivastavaNo ratings yet
- Approval Process 12-13-051011Document202 pagesApproval Process 12-13-051011Vijay BirariNo ratings yet
- TheUttarPradeshJudicialServiceRules2001 PDFDocument13 pagesTheUttarPradeshJudicialServiceRules2001 PDFpujasaxenaNo ratings yet
- Internet History and Growth: William F. Slater, III Chicago Chapter of The Internet Society September 2002Document50 pagesInternet History and Growth: William F. Slater, III Chicago Chapter of The Internet Society September 2002janga1988No ratings yet
- WorkDocument114 pagesWorkdipneet_saini27No ratings yet
- Puja ResumeDocument1 pagePuja ResumepujasaxenaNo ratings yet
- Solar Power Plant in Iit HyderabadDocument9 pagesSolar Power Plant in Iit HyderabadHimanshu VermaNo ratings yet
- CERES News Digest - Week 11, Vol.4, March 31-April 4Document6 pagesCERES News Digest - Week 11, Vol.4, March 31-April 4Center for Eurasian, Russian and East European StudiesNo ratings yet
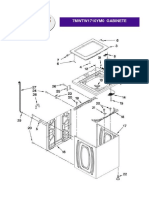
- 7MWTW1710YM0Document8 pages7MWTW1710YM0Izack-Dy JimZitNo ratings yet
- Vivado Power Analysis OptimizationDocument120 pagesVivado Power Analysis OptimizationBad BoyNo ratings yet
- Module 2 Lesson 2 Communication and TechnologyDocument7 pagesModule 2 Lesson 2 Communication and TechnologyClarence EscopeteNo ratings yet
- 04.CNOOC Engages With Canadian Stakeholders PDFDocument14 pages04.CNOOC Engages With Canadian Stakeholders PDFAdilNo ratings yet
- X606 PDFDocument1 pageX606 PDFDany OrioliNo ratings yet
- CV Najim Square Pharma 4 Years ExperienceDocument2 pagesCV Najim Square Pharma 4 Years ExperienceDelwarNo ratings yet
- Scheduled Events in MySQL Load CSV Fileto MysqltabDocument11 pagesScheduled Events in MySQL Load CSV Fileto Mysqltabboil35No ratings yet
- 3.1-7 Printer Deployment - Copy (Full Permission)Document18 pages3.1-7 Printer Deployment - Copy (Full Permission)Hanzel NietesNo ratings yet
- The Financing Cycle Summary, Case Study, AssignmentsDocument18 pagesThe Financing Cycle Summary, Case Study, AssignmentsbernadetteNo ratings yet
- Chinaware - Zen PDFDocument111 pagesChinaware - Zen PDFMixo LogiNo ratings yet
- Grade 5 Olympiad: Answer The QuestionsDocument14 pagesGrade 5 Olympiad: Answer The QuestionsVinieysha LoganathanNo ratings yet
- Keywords: Communication, Technology, Collaborative, Evaluative Learning, InnovativeDocument11 pagesKeywords: Communication, Technology, Collaborative, Evaluative Learning, InnovativeNnamani EmmanuelNo ratings yet
- Latifi LAMY Catalog 2013 PDFDocument76 pagesLatifi LAMY Catalog 2013 PDFWang LinusNo ratings yet
- 819-5917-April 2021-Domestic Warranty Policy ManualDocument46 pages819-5917-April 2021-Domestic Warranty Policy ManualDean KershnerNo ratings yet
- Wilo49608 Wilo Ge LeafletDocument46 pagesWilo49608 Wilo Ge LeafletJair Jimenez HerreraNo ratings yet
- CRM Module 1Document58 pagesCRM Module 1Dhrupal TripathiNo ratings yet
- IMO Special Areas Under MARPOLDocument2 pagesIMO Special Areas Under MARPOLRavi Viknesh100% (1)
- 25 - Marketing Channels - Value Networks.Document2 pages25 - Marketing Channels - Value Networks.zakavision100% (1)
- cv20672778 Prashanth - Sadak Operations-ManagerDocument4 pagescv20672778 Prashanth - Sadak Operations-ManagerBhasker NiftyNo ratings yet
- Note 2958296 Pre-Implementation Steps: Create Table TypeDocument3 pagesNote 2958296 Pre-Implementation Steps: Create Table Typevishnu900890No ratings yet
- Unit 8 - Week 7: Assignment 7Document3 pagesUnit 8 - Week 7: Assignment 7Nitin MoreNo ratings yet
- Netaji Subhas Open UniversityDocument4 pagesNetaji Subhas Open UniversityraydipanjanNo ratings yet
- How To Make Affidavit at Pune Collector OfficeDocument1 pageHow To Make Affidavit at Pune Collector Officejayram1961No ratings yet