You might also like
- Open-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsFrom EverandOpen-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsRating: 3 out of 5 stars3/5 (1)
- 1 2/21/2022 Esd Unit 1Document62 pages1 2/21/2022 Esd Unit 1Mohammad AshrafNo ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Chapter 1 - IntroductionDocument34 pagesChapter 1 - IntroductionSohaib ChoudharyNo ratings yet
- Embedded System IntroductionDocument42 pagesEmbedded System IntroductionHahahaNo ratings yet
- MSC - Microprocessors: Dr. Konstantinos Tatas Com - Tk@Fit - Ac.CyDocument92 pagesMSC - Microprocessors: Dr. Konstantinos Tatas Com - Tk@Fit - Ac.CyAhmed SaidNo ratings yet
- Chapter 1: Introduction: Jurusan Teknik Informatika UNTAG Surabaya 1Document39 pagesChapter 1: Introduction: Jurusan Teknik Informatika UNTAG Surabaya 1dayat_ridersNo ratings yet
- Embedded System In Industrial View: Industrial Embedded SystemsDocument36 pagesEmbedded System In Industrial View: Industrial Embedded SystemsPriya KosuriNo ratings yet
- Embedded Systems - CS 2364Document97 pagesEmbedded Systems - CS 2364S_Gunasekar100% (1)
- Embedded Systems Lecture 2: CPU Families, I/O Devices, and MemoriesDocument40 pagesEmbedded Systems Lecture 2: CPU Families, I/O Devices, and MemoriesSamuel AdamuNo ratings yet
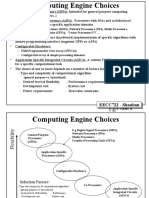
- EECC722 - ShaabanDocument101 pagesEECC722 - ShaabanAditya JagtapNo ratings yet
- Lecture-1 ARM Cortex M4-Based System PDFDocument36 pagesLecture-1 ARM Cortex M4-Based System PDFAnandNo ratings yet
- DSP Cores vs. ChipsDocument189 pagesDSP Cores vs. ChipsARAVINDNo ratings yet
- Embedded Systems Design (1)Document33 pagesEmbedded Systems Design (1)አምላኬ አባቴNo ratings yet
- Ico22 - 1 - Computer Abstraction and TechnologyDocument42 pagesIco22 - 1 - Computer Abstraction and Technology蔡炅宸No ratings yet
- Intro to Embedded SystemsDocument43 pagesIntro to Embedded SystemsVijendra PandeyNo ratings yet
- Embedded Systems Programming: Prof. Dr. Hassan AlansaryDocument20 pagesEmbedded Systems Programming: Prof. Dr. Hassan AlansaryAbdallah AdelNo ratings yet
- DSP and Multicore ProcessorsDocument12 pagesDSP and Multicore Processorsvvsulakhe6337No ratings yet
- Computer Abstractions and TechnologyDocument48 pagesComputer Abstractions and TechnologyDevipriya SozharajanNo ratings yet
- Frank Vahid/Tony Givargis: Part-1Document39 pagesFrank Vahid/Tony Givargis: Part-1madhuNo ratings yet
- Embedded Systems: Time: 2 HRS.) (Marks: 75Document18 pagesEmbedded Systems: Time: 2 HRS.) (Marks: 75Nilesh GuptaNo ratings yet
- Classification of Embedded Systems Three Types of Embedded Systems AreDocument24 pagesClassification of Embedded Systems Three Types of Embedded Systems Arekartika_krazeNo ratings yet
- UNIT 01 Inside The PC:Core ComponentsDocument45 pagesUNIT 01 Inside The PC:Core ComponentsAbbhinav JaiinNo ratings yet
- Architectures and Technologies for Embedded SystemsDocument18 pagesArchitectures and Technologies for Embedded SystemsbkdileepNo ratings yet
- Hydrabad PPT PDFDocument164 pagesHydrabad PPT PDFDSDNo ratings yet
- Syit Es CH2Document24 pagesSyit Es CH2truptiNo ratings yet
- Embedded SystemsDocument57 pagesEmbedded SystemsSyed ZNo ratings yet
- Design of Embedded SystemsDocument44 pagesDesign of Embedded SystemssivajiNo ratings yet
- Choosing the Right Processor for Embedded System DesignDocument45 pagesChoosing the Right Processor for Embedded System DesignINTTICNo ratings yet
- MCES-21CS43 Module-1 NotesDocument14 pagesMCES-21CS43 Module-1 NotesEdu techNo ratings yet
- Micro Controllers IDocument18 pagesMicro Controllers Ichatty85No ratings yet
- Architecture of SoCDocument25 pagesArchitecture of SoCsatyam jadhavNo ratings yet
- Computer Abstractions and Technology: Omputer Rganization and EsignDocument49 pagesComputer Abstractions and Technology: Omputer Rganization and EsignLailaGhazaliNo ratings yet
- ELEC 2142 (2016) Week 1Document40 pagesELEC 2142 (2016) Week 1David VangNo ratings yet
- 01 Lec - Intro - ESDocument23 pages01 Lec - Intro - ESArjun KelothuNo ratings yet
- Chapter1a Embedded System IntroDocument19 pagesChapter1a Embedded System IntroSorin NicolaNo ratings yet
- Introduction To Embedded Systems ByshibukvDocument36 pagesIntroduction To Embedded Systems ByshibukvNyein NyeinNo ratings yet
- Introduction To SoCDocument50 pagesIntroduction To SoCTan Chee YeongNo ratings yet
- ARM TutorialDocument25 pagesARM TutorialThi NguyenNo ratings yet
- Lecture 2 - Typical Embedded SystemDocument5 pagesLecture 2 - Typical Embedded SystemrhodonelduatinNo ratings yet
- Patterson6e MIPS Ch01 PPTDocument49 pagesPatterson6e MIPS Ch01 PPTalapabainviNo ratings yet
- Mr. A. B. Shinde: Assistant Professor, Electronics Engineering, PVPIT, BudhgaonDocument34 pagesMr. A. B. Shinde: Assistant Professor, Electronics Engineering, PVPIT, BudhgaonpremkumarNo ratings yet
- Altera Nios II Processor GuideDocument20 pagesAltera Nios II Processor Guidekdiv1174No ratings yet
- Embedded Systems: C.Sathyanathan J.Siddarth 9003841021Document22 pagesEmbedded Systems: C.Sathyanathan J.Siddarth 9003841021Srec SamuthayamNo ratings yet
- Beyond Ba22-De DatasheetDocument2 pagesBeyond Ba22-De DatasheetChronis KarpodinisNo ratings yet
- 14S4003 Introduction To Embedded System: Semester 1 2020/2021Document19 pages14S4003 Introduction To Embedded System: Semester 1 2020/2021Yohana Crisma LimbongNo ratings yet
- Computer Abstractions and TechnologyDocument49 pagesComputer Abstractions and TechnologyArvind RameshNo ratings yet
- Computer Abstractions and TechnologyDocument51 pagesComputer Abstractions and TechnologyMuhammad MuaviaNo ratings yet
- Reconfigurable ComputingDocument38 pagesReconfigurable ComputingHemant BhojwaniNo ratings yet
- Chapter 01Document50 pagesChapter 01nguyen hungNo ratings yet
- Verlogic2 Chapter1Document13 pagesVerlogic2 Chapter1Huyen PhanNo ratings yet
- MicroprocessorsDocument25 pagesMicroprocessorsKarneshwar SannamaniNo ratings yet
- Embedded and Real-Time Operating Systems: Course Code: 70439Document76 pagesEmbedded and Real-Time Operating Systems: Course Code: 70439SrikanthNo ratings yet
- Embedded System Life Cycle, GPIO and Intro To ArduinoDocument108 pagesEmbedded System Life Cycle, GPIO and Intro To ArduinoavogadroangsterNo ratings yet
- Lecture Note 02 - Microprocessor Concept Architectures and Its TrendsDocument82 pagesLecture Note 02 - Microprocessor Concept Architectures and Its TrendsPANDHU ARDI PRASETYONo ratings yet
- Lecture 2 - 2 - Introduction To Embedded SystemsDocument17 pagesLecture 2 - 2 - Introduction To Embedded Systemsnarin shirwanNo ratings yet
- Unit - I: Basic Structure of A Computer System Computer SystemDocument25 pagesUnit - I: Basic Structure of A Computer System Computer Systempuli sivaNo ratings yet
- ESD -DAY 2-PortalDocument35 pagesESD -DAY 2-PortaldraqulaincNo ratings yet
- Embedded system and Development overviewDocument38 pagesEmbedded system and Development overviewPRABHAKARAN.D MEC-AP/MCNo ratings yet
- Embedded Systems BY Varisa Sasibhushanarao (PH.D) Assistant Professor, Department OF Electronics and Communication Engineering, Rajiv Gandhi University of Knowledge Technologies - SrikakulamDocument34 pagesEmbedded Systems BY Varisa Sasibhushanarao (PH.D) Assistant Professor, Department OF Electronics and Communication Engineering, Rajiv Gandhi University of Knowledge Technologies - SrikakulamPandu KNo ratings yet
- PIC ASSEMBLY LANGUAGE LECTUREDocument65 pagesPIC ASSEMBLY LANGUAGE LECTURETarek Barhoum100% (2)
- PIC 16f877a Memory OrganizationDocument33 pagesPIC 16f877a Memory OrganizationTarek BarhoumNo ratings yet
- PIC16f877A Microcontrollers and Embedded SystemsDocument43 pagesPIC16f877A Microcontrollers and Embedded SystemsTarek BarhoumNo ratings yet
- Microcontrollers and Embedded SystemsDocument35 pagesMicrocontrollers and Embedded SystemsTarek BarhoumNo ratings yet
- Ai-Ml in 5G Challenge ReportDocument11 pagesAi-Ml in 5G Challenge ReportUsha ChandrakalaNo ratings yet
- Project Managemen 2 PDFDocument14 pagesProject Managemen 2 PDFMisha RanaNo ratings yet
- Construction Management LecturesDocument8 pagesConstruction Management LecturesJosua MenisNo ratings yet
- Physical Optics: Multiple Choice QuestionsDocument9 pagesPhysical Optics: Multiple Choice QuestionsHammadiqbal12No ratings yet
- Flange Leakag PEQ Allowable StressDocument1 pageFlange Leakag PEQ Allowable Stressazhagu duraiNo ratings yet
- Induction Cooker Circuit DesignDocument39 pagesInduction Cooker Circuit DesignMr. Pushparaj Ghodke74% (31)
- Experimental Phonetics 311Document7 pagesExperimental Phonetics 311Ebinabo EriakumaNo ratings yet
- Manual Horno 3DDocument11 pagesManual Horno 3DJose ZuñigaNo ratings yet
- Users Manual 3 994639Document140 pagesUsers Manual 3 994639Parul MehtaNo ratings yet
- Microsoft Excel Exam Assessment Questions: Important InstructionsDocument3 pagesMicrosoft Excel Exam Assessment Questions: Important InstructionsKaartiikBenNo ratings yet
- Service & Support: Communication Between SIMATIC S5 and Simatic S7 Over ProfibusDocument30 pagesService & Support: Communication Between SIMATIC S5 and Simatic S7 Over ProfibusMhd Samer AlHamwiNo ratings yet
- SST Programming Guide for Gen4 SystemsDocument8 pagesSST Programming Guide for Gen4 SystemsdmaslachNo ratings yet
- Test and MeasurementDocument23 pagesTest and Measurementcloudprintsph13No ratings yet
- ARDrone Developer GuideDocument113 pagesARDrone Developer GuideIzukaitz GardonyiNo ratings yet
- FCO560 Users Guide Issue 2aDocument63 pagesFCO560 Users Guide Issue 2aJames Mason100% (1)
- Standard Operating Procedure For Customer CreationDocument3 pagesStandard Operating Procedure For Customer CreationMRL AccountsNo ratings yet
- AltoQuadQuad-Dual v331 ReleaseNotesDocument8 pagesAltoQuadQuad-Dual v331 ReleaseNotespeichNo ratings yet
- Cockpit and Passenger Compartment Separation Solutions 1588230875Document14 pagesCockpit and Passenger Compartment Separation Solutions 1588230875rubenarisNo ratings yet
- How To Reset Canon MP198Document4 pagesHow To Reset Canon MP198Eko NoegNo ratings yet
- ZXUN USPP Load BalancingDocument69 pagesZXUN USPP Load BalancingTawhid AlamNo ratings yet
- What is an Operating SystemDocument46 pagesWhat is an Operating SystemomviskarNo ratings yet
- Metering SatamDocument3 pagesMetering SatamYohanes AzzisNo ratings yet
- 22 Simple Ways To Increase Instagram Engagement (Free Calculator)Document3 pages22 Simple Ways To Increase Instagram Engagement (Free Calculator)you forNo ratings yet
- Sugar Mommy PDF 3Document1 pageSugar Mommy PDF 3mudashiradebamiji100% (2)
- RPT InventoryDocument74 pagesRPT InventoryISAM AHMEDNo ratings yet
- Unit1 DBMSDocument64 pagesUnit1 DBMSRaj SuraseNo ratings yet
- CCTV Storage Space and Network Bandwidth CalculatorDocument1 pageCCTV Storage Space and Network Bandwidth CalculatorSales TransemNo ratings yet
- Entrepreneurship Pre-Test: Kyle's Typing Business ExpandsDocument3 pagesEntrepreneurship Pre-Test: Kyle's Typing Business ExpandsMutya Neri Cruz100% (1)
- LPC1788 User ManualDocument1,035 pagesLPC1788 User Manualamuzahid15No ratings yet
- BSBPMG540 Task 2 Knowledge Questions V1.1121-SV049116-MarianaVargasGarciaDocument5 pagesBSBPMG540 Task 2 Knowledge Questions V1.1121-SV049116-MarianaVargasGarciaRahmi Can ÖzmenNo ratings yet