You might also like
- Method of Statement For Pressure Test PDFDocument2 pagesMethod of Statement For Pressure Test PDFBen Lim0% (1)
- Acceptance Criteria For CSWIP 3.1Document19 pagesAcceptance Criteria For CSWIP 3.1Muhammed Abo-Fandood100% (5)
- Emceequicknotes 2009Document6 pagesEmceequicknotes 2009jeromebpalacio5058No ratings yet
- General Guidelines and MechanicsDocument2 pagesGeneral Guidelines and MechanicsMary Cris Go100% (1)
- Geo Paper 2 2019Document76 pagesGeo Paper 2 2019Venant Hakizimana100% (1)
- NCDC POW Revised March, 2018 BlankDocument13 pagesNCDC POW Revised March, 2018 BlankMarielle MenorNo ratings yet
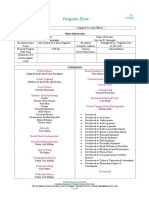
- First Part: Program FlowDocument2 pagesFirst Part: Program FlowHannah LedresNo ratings yet
- STB5100 Electric Wiring DiagramDocument10 pagesSTB5100 Electric Wiring Diagramsea13100% (2)
- Clo1-Mathematical Modelling - Translational Mechanical SystemDocument38 pagesClo1-Mathematical Modelling - Translational Mechanical SystemKasri AzizNo ratings yet
- Letter Requesting For A Recorded Message Cong JoeyDocument1 pageLetter Requesting For A Recorded Message Cong JoeyChristian DyNo ratings yet
- Session 1 - Introduction To JavaDocument36 pagesSession 1 - Introduction To Javat0eberriesNo ratings yet
- ScriptDocument2 pagesScriptLito ObstaculoNo ratings yet
- Vaa-Erd: Technological University of The PhilippinesDocument6 pagesVaa-Erd: Technological University of The PhilippinesMarvin Sarmiento TalimonganNo ratings yet
- Emcee SpeechDocument3 pagesEmcee SpeechMaryMayCariñoGontiñasNo ratings yet
- Theme: "Wetland and Biodiversity": Celebrating World Wetlands Day 2010 Hacienda Gracia Lubao, Pampanga February 1-2, 2019Document3 pagesTheme: "Wetland and Biodiversity": Celebrating World Wetlands Day 2010 Hacienda Gracia Lubao, Pampanga February 1-2, 2019Sonjai SalengaNo ratings yet
- Computer Literacy Proposal My Original CDocument8 pagesComputer Literacy Proposal My Original Cmehari kiros100% (1)
- NSTP Graduation SpeechDocument1 pageNSTP Graduation SpeechMae Anne De VeraNo ratings yet
- Programme For The Emcee.Document5 pagesProgramme For The Emcee.Nica Lorenzana De GuzmanNo ratings yet
- 4-Confluence of Multiple Disciplines, Classifictaion, Integration-08-Feb-2021Material I 08-Feb-2021 Mod1 Confluence ClassifictaionDocument4 pages4-Confluence of Multiple Disciplines, Classifictaion, Integration-08-Feb-2021Material I 08-Feb-2021 Mod1 Confluence ClassifictaionLikith MallipeddiNo ratings yet
- Dr. Ma. Florecilla C. Cinches Dr. Teresita T. TumaponDocument5 pagesDr. Ma. Florecilla C. Cinches Dr. Teresita T. TumaponTim ArroyoNo ratings yet
- DBM Regional Advisory No. 2021-018 - Submission of FY 2021 Mid-Year Agency Performance Review (APR) ReportDocument4 pagesDBM Regional Advisory No. 2021-018 - Submission of FY 2021 Mid-Year Agency Performance Review (APR) ReportBhem Fernandez Romero100% (1)
- Lesson Plan 2GSSDDocument4 pagesLesson Plan 2GSSDkiransreeNo ratings yet
- Module 1.1 - Introduction-ELECDocument17 pagesModule 1.1 - Introduction-ELECheromiki316100% (1)
- Sports Fest Emcee ScriptDocument2 pagesSports Fest Emcee ScriptRhea Bercasio-GarciaNo ratings yet
- Vespers Order of Service - Sample Presider Script PDFDocument6 pagesVespers Order of Service - Sample Presider Script PDFLeth JuanNo ratings yet
- Basic Operations and Components of A Computer SystemDocument18 pagesBasic Operations and Components of A Computer SystemAbena, Kianne C.No ratings yet
- Quiz Show Rules and RegulationsDocument4 pagesQuiz Show Rules and RegulationsMasarap Kahit Walang SauceNo ratings yet
- William Stallings Computer Organization and Architecture 8 EditionDocument18 pagesWilliam Stallings Computer Organization and Architecture 8 Editionbree789No ratings yet
- Retro Party ScriptDocument5 pagesRetro Party ScriptPHILL BITUINNo ratings yet
- What Is A Computer?Document7 pagesWhat Is A Computer?Stevenson CacNo ratings yet
- Welcoming SpeecDocument3 pagesWelcoming Speecramilo vinasNo ratings yet
- SJF Scheduling - SRTF - CPU SchedulingDocument9 pagesSJF Scheduling - SRTF - CPU SchedulingKushal Roy ChowdhuryNo ratings yet
- Emcee ScriptDocument1 pageEmcee ScriptWnhannan MohamadNo ratings yet
- ELC724318 - Install Computer System and NetworksDocument5 pagesELC724318 - Install Computer System and NetworksLorniloNo ratings yet
- Practicing The ECE Profession PDFDocument6 pagesPracticing The ECE Profession PDFRenesiy Marco NovillaNo ratings yet
- Ladies and Gentlemen, Welcome To Caloocan City Business High School Turn-Over and Mass Induction Ceremony 2019Document2 pagesLadies and Gentlemen, Welcome To Caloocan City Business High School Turn-Over and Mass Induction Ceremony 2019Rachel Jane FloresNo ratings yet
- The 7es Model of InstructionDocument13 pagesThe 7es Model of InstructionArmando VillagraciaNo ratings yet
- Emcee ScriptDocument1 pageEmcee ScriptRose Mia PalamanNo ratings yet
- Parts of A Computer With Their FunctionsDocument19 pagesParts of A Computer With Their FunctionsJaried SumbaNo ratings yet
- STU SigCaptX Guide PDFDocument12 pagesSTU SigCaptX Guide PDFCristian GrosaruNo ratings yet
- Business Meeting Script ExampleDocument13 pagesBusiness Meeting Script ExampleFarrah MahmoodNo ratings yet
- 07 Membership Upgrade and Benefits Presenter Almalarce For IIEE CRC Saudi ArabiaDocument44 pages07 Membership Upgrade and Benefits Presenter Almalarce For IIEE CRC Saudi ArabiaplaanitNo ratings yet
- Matlab Programming For EngineersDocument36 pagesMatlab Programming For EngineersEngr Nissar KakarNo ratings yet
- Script WebinarDocument7 pagesScript WebinarMaynard LontocNo ratings yet
- Introduction To ComputerDocument72 pagesIntroduction To Computerel hajj yusufuNo ratings yet
- Script - Welcome Sa QC Launch (REVISED-RMG)Document4 pagesScript - Welcome Sa QC Launch (REVISED-RMG)Raymund Magno GarlitosNo ratings yet
- Programme Sports FestDocument8 pagesProgramme Sports FestNC Tiger Driving School100% (1)
- Ttt-Proposal Writing WorkshopDocument92 pagesTtt-Proposal Writing WorkshopIbrahim Abubakar AlhajiNo ratings yet
- Script Superdupper Final..HahahaDocument8 pagesScript Superdupper Final..HahahaJade PaulinNo ratings yet
- ELC724321 - Maintain Computer System and Networks PDFDocument3 pagesELC724321 - Maintain Computer System and Networks PDFLorniloNo ratings yet
- CV Semti IT Analyst 1st 2nd Line SupportDocument3 pagesCV Semti IT Analyst 1st 2nd Line Supportfaber80100% (1)
- Jumaquio - Paquingan PROGRAM FLOWDocument2 pagesJumaquio - Paquingan PROGRAM FLOWkeziahNo ratings yet
- Service Parts List: 4.5" (115mm) ANGLE GRINDERDocument3 pagesService Parts List: 4.5" (115mm) ANGLE GRINDERAlvaro Fernando Reyes CastañedaNo ratings yet
- ODAC Championship Script (General For All Team Sports)Document2 pagesODAC Championship Script (General For All Team Sports)Dizon GembangNo ratings yet
- Room Watcher Personal Data SheetDocument3 pagesRoom Watcher Personal Data SheetGiovanni NaagNo ratings yet
- Pamantasan NG Lungsod NG Maynila: Internship Progress Report # 1Document2 pagesPamantasan NG Lungsod NG Maynila: Internship Progress Report # 1angie rosalesNo ratings yet
- Birthday Script For MCDocument3 pagesBirthday Script For MCenamarie.olivaresNo ratings yet
- Christmas Opening SpeechDocument2 pagesChristmas Opening SpeechJoey Joe100% (2)
- RTU MECHENGG Curriculum SheetDocument4 pagesRTU MECHENGG Curriculum SheetjoennelmayariNo ratings yet
- Block Diagram of Control System: R e N y UDocument20 pagesBlock Diagram of Control System: R e N y Uমেশকাতুল ইসলাম100% (1)
- Automatic Control System and Control LoopsDocument60 pagesAutomatic Control System and Control Loopsmoovendan pNo ratings yet
- Lecture (1) : Introduction To Control SystemsDocument27 pagesLecture (1) : Introduction To Control SystemsA .B. SolankiNo ratings yet
- Air Valve CatalogDocument58 pagesAir Valve CatalogJohn Holding100% (2)
- Hidraulic A 312Document22 pagesHidraulic A 312dzana90100% (1)
- Capacity of Parts To Lubricate - Mod. SamsonDocument2 pagesCapacity of Parts To Lubricate - Mod. SamsonbetobebetoNo ratings yet
- Approval Drawings: Ceiling Fan HeaterDocument4 pagesApproval Drawings: Ceiling Fan HeaterAlvaro FerroNo ratings yet
- C Type Build Manual 2017 RFDocument68 pagesC Type Build Manual 2017 RFJoakim EkmanNo ratings yet
- Question For EXP Loadcase On B31.3 CodeDocument4 pagesQuestion For EXP Loadcase On B31.3 CodeSharun SureshNo ratings yet
- Radiation Cooler Vendor ListDocument1 pageRadiation Cooler Vendor ListindraNo ratings yet
- Condensate Drain Calculation - Split Units PDFDocument1 pageCondensate Drain Calculation - Split Units PDFAltaf KhanNo ratings yet
- 01-SAMSS-043 2018 ASTM Carbon Steel and Low Alloy Pipes For On-Plot ApplicationsDocument18 pages01-SAMSS-043 2018 ASTM Carbon Steel and Low Alloy Pipes For On-Plot ApplicationsWHWEN100% (1)
- How To Develop SIF Proof TestsDocument12 pagesHow To Develop SIF Proof TestsIkhtiander IkhtianderNo ratings yet
- BMSY 460C Instruction ManualDocument41 pagesBMSY 460C Instruction ManualvijaykmjNo ratings yet
- Technical AssessmentDocument22 pagesTechnical AssessmentdennisjuntakNo ratings yet
- Program SEIKEN 2020 - REV.2Document3 pagesProgram SEIKEN 2020 - REV.2franzknievelNo ratings yet
- Pipelines InstallationDocument24 pagesPipelines Installationzabih Saka100% (2)
- ManualDocument4 pagesManualcristianNo ratings yet
- Pernos Avellanados (Countersunk Bolt)Document9 pagesPernos Avellanados (Countersunk Bolt)Eric ToroNo ratings yet
- Variable Speed DriveDocument16 pagesVariable Speed DriveAnonymous M0tjyWNo ratings yet
- H2O2 Soap: Agitator 2 Drum Pulper VatDocument1 pageH2O2 Soap: Agitator 2 Drum Pulper VatMatsumura SokonNo ratings yet
- EJMA-2008 - Standards of The Expansion Joint Manufacturers Association - 9th Edition PDFDocument238 pagesEJMA-2008 - Standards of The Expansion Joint Manufacturers Association - 9th Edition PDFJMNo ratings yet
- Honda Bf50dDocument167 pagesHonda Bf50dAbd OuNo ratings yet
- Bearing Specs TableDocument240 pagesBearing Specs TableJan Michael VecillesNo ratings yet
- Wear Introduction of WearDocument22 pagesWear Introduction of WearVinit ShrivastavaNo ratings yet
- Giant Bicycles Bike 2126Document1 pageGiant Bicycles Bike 2126Sandra BernalNo ratings yet
- Internal Erosion in Embankment Dams - Research Report On PDFDocument70 pagesInternal Erosion in Embankment Dams - Research Report On PDFflavbomNo ratings yet
- Computational Fluid Dynamics IDocument3 pagesComputational Fluid Dynamics Iapi-296698256No ratings yet
- Calculation - Loading PlatformDocument7 pagesCalculation - Loading PlatformDaniel SarmientoNo ratings yet
- Prs Qes 80 400-230v 50hz en WuxiDocument6 pagesPrs Qes 80 400-230v 50hz en WuxiDesign BookNo ratings yet