You might also like
- 1.1.1 Binary SystemsDocument23 pages1.1.1 Binary SystemsKhemou DjvickzNo ratings yet
- LIDAR Perception Challenges PDFDocument2 pagesLIDAR Perception Challenges PDFo penNo ratings yet
- 1.3.3 Input DevicesDocument21 pages1.3.3 Input DevicesSyed Muhammad MashhadiNo ratings yet
- Understanding Triangulation Laser Measurement 22122023 V1Document8 pagesUnderstanding Triangulation Laser Measurement 22122023 V1chloee1008No ratings yet
- Sensors and Signal ConditionersDocument72 pagesSensors and Signal ConditionersBandari MamathaNo ratings yet
- 1.3.3 Input DevicesDocument39 pages1.3.3 Input DevicessubikhanNo ratings yet
- Quadcopter Orientation SensorsDocument16 pagesQuadcopter Orientation SensorsantonNo ratings yet
- Co2 d30 Laser MarkerDocument8 pagesCo2 d30 Laser MarkerIksan MustofaNo ratings yet
- IR Sensor Circuit Diagram and Working Principle ExplainedDocument7 pagesIR Sensor Circuit Diagram and Working Principle ExplainedKirz SerranoNo ratings yet
- Types of Robot SensorsDocument8 pagesTypes of Robot Sensorsmd anik hasanNo ratings yet
- Infrared IR Sensor Circuit Diagram and Working PrincipleDocument18 pagesInfrared IR Sensor Circuit Diagram and Working PrincipleNehaCruiseNo ratings yet
- Leitz PMM-C Line: Version 2015-5Document12 pagesLeitz PMM-C Line: Version 2015-5kimikononNo ratings yet
- Reverse EngineeringDocument45 pagesReverse Engineeringranjeet kumarNo ratings yet
- Hikvision - Ds 2de7186 A - Data SheetDocument1 pageHikvision - Ds 2de7186 A - Data SheetNax ZoneNo ratings yet
- AHD One Cable Selection 2017 0815Document11 pagesAHD One Cable Selection 2017 0815johnsgdNo ratings yet
- 02 Sensors and Variables EstimationDocument57 pages02 Sensors and Variables EstimationHanael Ngadi TsoudoudouNo ratings yet
- Blind Spot DetectionDocument13 pagesBlind Spot DetectionSohirin AdnanNo ratings yet
- Lecture 3 - WSN For RoboticsDocument33 pagesLecture 3 - WSN For RoboticsDaniel KetemawNo ratings yet
- A Comparative Study On LIDAR and Ultrasonic Sensor For Obstacle Avoidance Robot CarDocument6 pagesA Comparative Study On LIDAR and Ultrasonic Sensor For Obstacle Avoidance Robot Carachinto tonmoyNo ratings yet
- Input & Output Devices - Complete ChapterDocument128 pagesInput & Output Devices - Complete ChapterRana AzanNo ratings yet
- Safari - Feb 4, 2024 at 11:38 PMDocument1 pageSafari - Feb 4, 2024 at 11:38 PMsyansyncNo ratings yet
- Sensors and Computing Hardware: Course 1, Module 2, Lesson 1Document17 pagesSensors and Computing Hardware: Course 1, Module 2, Lesson 1progisNo ratings yet
- Sensors and Computing Hardware: Course 1, Module 2, Lesson 1Document17 pagesSensors and Computing Hardware: Course 1, Module 2, Lesson 1Yash KalaNo ratings yet
- The Essential Guide to Choosing the Right 3D ScannerDocument13 pagesThe Essential Guide to Choosing the Right 3D ScannermakoyNo ratings yet
- Mitutoyo - Mikrometry Laserowe Laser Scan Micrometer - E13004 - 2016 ENDocument40 pagesMitutoyo - Mikrometry Laserowe Laser Scan Micrometer - E13004 - 2016 END.T.No ratings yet
- Mechatronics System Design ApplicationsDocument36 pagesMechatronics System Design ApplicationsKarthikeyan89No ratings yet
- 3-D Scanner: B.Tech-Mechatronics (5 SemesterDocument17 pages3-D Scanner: B.Tech-Mechatronics (5 Semestershekhar yadavNo ratings yet
- What Is An AutocollimatorDocument3 pagesWhat Is An Autocollimatoranurag6866No ratings yet
- How To Identify and Select Good Arduino Distance SensorsDocument15 pagesHow To Identify and Select Good Arduino Distance SensorsjackNo ratings yet
- SENSORS TRANSDUCERS AND MEMSDocument14 pagesSENSORS TRANSDUCERS AND MEMSSathiya PriyaNo ratings yet
- Dec50122-Embedded Robotic: Free Powerpoint TemplatesDocument13 pagesDec50122-Embedded Robotic: Free Powerpoint TemplatesBewNo ratings yet
- Instructions For Creating A 3D Laser Scanner Based On A CNC MachineDocument33 pagesInstructions For Creating A 3D Laser Scanner Based On A CNC MachineKamran ManafzadeNo ratings yet
- MODULE 10 - OTHER PRS Laser Systems - Taut WireDocument27 pagesMODULE 10 - OTHER PRS Laser Systems - Taut Wiregavin.vedder1980No ratings yet
- Smart Dust: K. Pister, J. Kahn, B. Boser (UCB) S. Morris (MLB)Document21 pagesSmart Dust: K. Pister, J. Kahn, B. Boser (UCB) S. Morris (MLB)Ashok SutharNo ratings yet
- LIDAR PRESENTATIONDocument16 pagesLIDAR PRESENTATIONfranchescamendez178No ratings yet
- DH-IPC-HDW8341X-3D: 3MP Dual-Lens People Counting AI Network CameraDocument3 pagesDH-IPC-HDW8341X-3D: 3MP Dual-Lens People Counting AI Network CameraRazvan FilipNo ratings yet
- LIT.9252 TH6x Seam Tracking 03-19 WebDocument16 pagesLIT.9252 TH6x Seam Tracking 03-19 Webbogew69052No ratings yet
- Image Sensors Chapter 05Document72 pagesImage Sensors Chapter 05Joe MullerNo ratings yet
- KGUARD CSP-3642-6 IR CameraDocument1 pageKGUARD CSP-3642-6 IR CamerashazaniNo ratings yet
- Winmate Barcode Reader User Guide - V1.2Document26 pagesWinmate Barcode Reader User Guide - V1.2Dinesh GodhaniNo ratings yet
- Department of Electronics and Communication EngineeringDocument20 pagesDepartment of Electronics and Communication EngineeringsreehariNo ratings yet
- Performing Project On RadarDocument17 pagesPerforming Project On RadarafshachowdhuryNo ratings yet
- Obstacle Detecting Robot Using Arduino and Sensor: A.Saraswathi, A.Ameer Abbas, S.Indu Mathi, A.EswaranDocument3 pagesObstacle Detecting Robot Using Arduino and Sensor: A.Saraswathi, A.Ameer Abbas, S.Indu Mathi, A.EswaranKiran GadakhNo ratings yet
- Rotary Encoder PDFDocument8 pagesRotary Encoder PDFKhaled RabeaNo ratings yet
- Sensors For A Robot: Based On Book by Fred MartinDocument84 pagesSensors For A Robot: Based On Book by Fred MartinsiveshvarNo ratings yet
- DH IPC HDW8341X 3D - Datasheet - 201902251Document3 pagesDH IPC HDW8341X 3D - Datasheet - 201902251Gabriel LópezNo ratings yet
- Unmanned Ground Combat Vehicle Surveillance & SecurityDocument5 pagesUnmanned Ground Combat Vehicle Surveillance & SecurityBj BaJwaNo ratings yet
- DH-IPC-HDBW8242E-Z4FR Datasheet 20190218 OkDocument3 pagesDH-IPC-HDBW8242E-Z4FR Datasheet 20190218 Okfany colinNo ratings yet
- Tps1200plus-Databasem AlkohlanyDocument16 pagesTps1200plus-Databasem AlkohlanyAyman Al-samawyNo ratings yet
- State Estimation without GPS or external camerasDocument14 pagesState Estimation without GPS or external camerasLeonardo KnuppNo ratings yet
- Basic Inro - RobotsDocument9 pagesBasic Inro - RobotsAwais khalidNo ratings yet
- DS-2DE7176/7174 Series: 1.3MP Network IR PTZ Dome CameraDocument1 pageDS-2DE7176/7174 Series: 1.3MP Network IR PTZ Dome CameraYair MendozaNo ratings yet
- Implementation of 3D Scanner Using IR Distance Sensor Ijariie8280Document6 pagesImplementation of 3D Scanner Using IR Distance Sensor Ijariie8280MERYEM LAHBOUBNo ratings yet
- Project ReportDocument13 pagesProject Reporttheoriginalhybrid9No ratings yet
- Direct Digital Radiography W13Document32 pagesDirect Digital Radiography W13HabiB-BoyGuysNo ratings yet
- D-IPC-HDW5541HP-AS-PV-2.8. - Data SheetDocument3 pagesD-IPC-HDW5541HP-AS-PV-2.8. - Data SheetAugusto MakarNo ratings yet
- 3D ScannerDocument27 pages3D ScannerMarea Samer YahiaNo ratings yet
- 022516-364C - Trimble X7 - DS - USL - 1020 - LRsec PDFDocument4 pages022516-364C - Trimble X7 - DS - USL - 1020 - LRsec PDFWilfredoUreñoNo ratings yet
- SANTRO Hatchback BrochureDocument10 pagesSANTRO Hatchback Brochureronak chandranNo ratings yet
- First American Grand Prix - The Savannah Auto Races, 1908-1911, The - Tanya A. BaileyDocument239 pagesFirst American Grand Prix - The Savannah Auto Races, 1908-1911, The - Tanya A. BaileyFilipeBouraNo ratings yet
- AzureFW-SpokeCommDocument6 pagesAzureFW-SpokeCommfethi ozaliciNo ratings yet
- 6G ReportDocument33 pages6G ReportJesin John LMC19MCA003No ratings yet
- Manual PDFDocument486 pagesManual PDFMin MinNo ratings yet
- Digilocker VacDocument5 pagesDigilocker Vacanshikasgh3012No ratings yet
- LabVIEW - FPGA Module User ManualDocument62 pagesLabVIEW - FPGA Module User ManualRajasekar PichaimuthuNo ratings yet
- Omniswitch 6600 Family Hardware Users Guide: Part No. 060181-10, Rev. G September 2006Document144 pagesOmniswitch 6600 Family Hardware Users Guide: Part No. 060181-10, Rev. G September 2006DAGNUXNo ratings yet
- Features: CC CC IN PeakDocument3 pagesFeatures: CC CC IN PeakRobson DiasNo ratings yet
- Project Manager O&G Subsea in Houston TX Resume Donald MarkeyDocument4 pagesProject Manager O&G Subsea in Houston TX Resume Donald MarkeyDonaldMarkeyNo ratings yet
- Zone List Overview (∗81 Menu ModeDocument1 pageZone List Overview (∗81 Menu ModejmurcelNo ratings yet
- 1.introductory Pages PDFDocument16 pages1.introductory Pages PDFthiemNo ratings yet
- Combined Production Order ProcessingDocument12 pagesCombined Production Order Processingsaps4hana ppNo ratings yet
- Turkstream Pipeline PrecommissioningDocument2 pagesTurkstream Pipeline PrecommissioningWayne BerreyNo ratings yet
- Key Plan:: North True NorthDocument1 pageKey Plan:: North True Northraj vaddiNo ratings yet
- Airline Benchmarking and Performance ImprovementDocument27 pagesAirline Benchmarking and Performance ImprovementJatin ParmarNo ratings yet
- ABS - Smartdust Network For Tactical Border Surveillance System To Detect, Classify and Track Enemy IntrusionDocument1 pageABS - Smartdust Network For Tactical Border Surveillance System To Detect, Classify and Track Enemy IntrusionRyan ZamoraNo ratings yet
- Oracle Apps Accounting Calendar SetupDocument3 pagesOracle Apps Accounting Calendar SetupRoopu PillariNo ratings yet
- Naveen Kumar GDocument2 pagesNaveen Kumar GRajeshkumar PothupalepuNo ratings yet
- Acoustic Emission Sensing in Wireless Sensor NetworksDocument143 pagesAcoustic Emission Sensing in Wireless Sensor NetworksakozyNo ratings yet
- BoostLi Energy Storage Module ESM-48100U2 User ManualDocument51 pagesBoostLi Energy Storage Module ESM-48100U2 User Manualsoulmuh75% (4)
- Final June 2019 15 05 2019Document13 pagesFinal June 2019 15 05 2019Anshuman Pathak GhazipurNo ratings yet
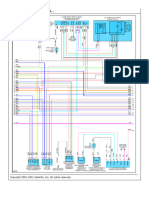
- Engine Controls Hybrid System Circuit D2Document1 pageEngine Controls Hybrid System Circuit D2FranciscoNo ratings yet
- How To Submit To D2LDocument1 pageHow To Submit To D2LArtem GovorovNo ratings yet
- PV Is Entering The AI Era: Special Edition Developed in Partnership With HuaweiDocument44 pagesPV Is Entering The AI Era: Special Edition Developed in Partnership With Huaweimarcoant2287No ratings yet
- GlobalizationDocument18 pagesGlobalizationAayushiNo ratings yet
- Variables and Data Types in CDocument4 pagesVariables and Data Types in C7mood 102No ratings yet
- Windows Share Point Services Administrator's GuideDocument382 pagesWindows Share Point Services Administrator's GuideMarvin AlexisNo ratings yet
- 01-2020 DL CNNDocument17 pages01-2020 DL CNNSayeed HabeebNo ratings yet
- Explanation About Photo CollageDocument2 pagesExplanation About Photo CollagePham Duc HienNo ratings yet