You might also like
- Practical Design of Experiments: DoE Made EasyFrom EverandPractical Design of Experiments: DoE Made EasyRating: 4.5 out of 5 stars4.5/5 (7)
- Introduction to Management Science TechniquesDocument211 pagesIntroduction to Management Science TechniquesrahuljiitNo ratings yet
- Galactic Handbook and Synchronized MeditationsDocument91 pagesGalactic Handbook and Synchronized Meditationslapiton100% (10)
- SPC英文版教材Document83 pagesSPC英文版教材bing cai100% (2)
- Linear Programming Basic Concepts and Graphical SolutionsDocument7 pagesLinear Programming Basic Concepts and Graphical Solutionsgtmani123No ratings yet
- St. Xavier's University KolkataDocument40 pagesSt. Xavier's University KolkataME 26 PRADEEP KUMARNo ratings yet
- Linear Programming I: Graphic Solution and FormulationDocument3 pagesLinear Programming I: Graphic Solution and Formulationtejashraj93No ratings yet
- Rohit Oberoi - General A - Assignment 1Document6 pagesRohit Oberoi - General A - Assignment 1Rohit OberoiNo ratings yet
- (PR4)Document7 pages(PR4)SoNamx TwoK-SFive SonAmxNo ratings yet
- Discuss The Methodology of Operations ResearchDocument5 pagesDiscuss The Methodology of Operations Researchankitoye0% (1)
- Chapter 2 LP-3Document69 pagesChapter 2 LP-3Mesfin MekuriaNo ratings yet
- Online Text Editor PDFDocument2 pagesOnline Text Editor PDFShreyash EkboteNo ratings yet
- Introduction to Linear Programming MethodsDocument31 pagesIntroduction to Linear Programming MethodsAyalew LakeNo ratings yet
- Chapter 2 LP-3Document68 pagesChapter 2 LP-3Ayalew Lake100% (1)
- Linear ProgrammingDocument30 pagesLinear Programmingyilma7gNo ratings yet
- Linear Programming Nonnegative VariablesDocument5 pagesLinear Programming Nonnegative VariableschxrlttxNo ratings yet
- QuantitativeDocument17 pagesQuantitativeJannatul FerdoushNo ratings yet
- Optimization methods for minimizing functionsDocument13 pagesOptimization methods for minimizing functionsDivyamNo ratings yet
- AOA 2021 SolutionDocument17 pagesAOA 2021 SolutionSachin SharmaNo ratings yet
- Theory: Assignment ProblemsDocument5 pagesTheory: Assignment Problemsnilkanth bhattNo ratings yet
- Maximize Profits with LPDocument4 pagesMaximize Profits with LPADEYANJU AKEEMNo ratings yet
- Linear Programming Problem: Basic RequirementsDocument5 pagesLinear Programming Problem: Basic RequirementsNusrat Jahan MoonNo ratings yet
- Linear Programming Model Formulation and Graphical SolutionDocument3 pagesLinear Programming Model Formulation and Graphical SolutionxyzNo ratings yet
- Linear ProgrammingDocument9 pagesLinear ProgrammingrahulrockonNo ratings yet
- Linear Programming ReviewerDocument4 pagesLinear Programming ReviewerKaila Mae Tan DuNo ratings yet
- LPPDocument23 pagesLPPmanojpatel51100% (2)
- LPP TheoryDocument17 pagesLPP Theorymandar1989No ratings yet
- WRPM Assessment AnsDocument4 pagesWRPM Assessment Ansbiramoabinet59No ratings yet
- Unit 2Document21 pagesUnit 2Rebecca SanchezNo ratings yet
- Linear Programming - Defined As The Problem of Maximizing or Minimizing A Linear Function Subject ToDocument6 pagesLinear Programming - Defined As The Problem of Maximizing or Minimizing A Linear Function Subject ToJohn Emerald GoloNo ratings yet
- OR Notes For MBADocument7 pagesOR Notes For MBAalakaNo ratings yet
- CH 2 LPPMDocument88 pagesCH 2 LPPMsemetegna she zemen 8ተኛው ሺ zemen ዘመን100% (1)
- STEPS TO SOLVE LINEAR PROGRAMMINGDocument3 pagesSTEPS TO SOLVE LINEAR PROGRAMMINGKushal DeyNo ratings yet
- Introduction To LPP: - The Most Important Function of Management Is Decision Making, A Large Number of DecisionDocument29 pagesIntroduction To LPP: - The Most Important Function of Management Is Decision Making, A Large Number of DecisionsitsumitNo ratings yet
- Linear Programming ProblemDocument83 pagesLinear Programming ProblemAbdi NegassaNo ratings yet
- Maximizing Profits with Linear ProgrammingDocument23 pagesMaximizing Profits with Linear ProgrammingAjay Vernekar100% (1)
- Linear Programming - The Graphical MethodDocument6 pagesLinear Programming - The Graphical MethodRenato B. AguilarNo ratings yet
- Mba 641 Chapter TwoDocument38 pagesMba 641 Chapter Twowondosen birhanuNo ratings yet
- OR Mod 2Document27 pagesOR Mod 2harishankarka28No ratings yet
- MB0032 Set-1Document9 pagesMB0032 Set-1Shakeel ShahNo ratings yet
- Linear ProgrammingDocument8 pagesLinear ProgrammingbeebeeNo ratings yet
- Optimization Problems ExplainedDocument16 pagesOptimization Problems ExplainedKhayRhen LatozaNo ratings yet
- SMU Assignment Solve Operation Research, Fall 2011Document11 pagesSMU Assignment Solve Operation Research, Fall 2011amiboi100% (1)
- OR Ch-2Document30 pagesOR Ch-2fitsebigNo ratings yet
- Linear Programming OptimizationDocument10 pagesLinear Programming OptimizationRaghav JakhetiyaNo ratings yet
- LP Problem Formulation Process:: Linear OptimizationDocument9 pagesLP Problem Formulation Process:: Linear OptimizationYusuf HusseinNo ratings yet
- Unit 4,5Document13 pagesUnit 4,5ggyutuygjNo ratings yet
- Linear Programming Chapter SummaryDocument7 pagesLinear Programming Chapter SummaryAmaia MartinicorenaNo ratings yet
- LPP-Linear Programming ProblemDocument10 pagesLPP-Linear Programming ProblemVasanth Kumar BonifaceNo ratings yet
- MB0048 - Operations ResearchDocument10 pagesMB0048 - Operations ResearchdeepmaniarNo ratings yet
- Optimization Models HUSTDocument24 pagesOptimization Models HUSTLan - GV trường TH Trác Văn Nguyễn Thị NgọcNo ratings yet
- Linear Programming - Graphical MethodDocument6 pagesLinear Programming - Graphical Methodashish kanwarNo ratings yet
- Decision ModellingDocument280 pagesDecision ModellingMohamed JamalNo ratings yet
- Week 3a - PPT 3 - AMG 211 (Linear Programming)Document17 pagesWeek 3a - PPT 3 - AMG 211 (Linear Programming)not funny didn't laughNo ratings yet
- TheoryDocument5 pagesTheorysonali guptaNo ratings yet
- Maths CH 3Document17 pagesMaths CH 3best OneNo ratings yet
- Op Tim IzationDocument4 pagesOp Tim Izationhashim_mokhtar9286No ratings yet
- Operations Research PDFDocument63 pagesOperations Research PDFHari ShankarNo ratings yet
- Lecture 2-Linear Programming With Graphical MethodDocument11 pagesLecture 2-Linear Programming With Graphical MethodSabbir Hossain MustakimNo ratings yet
- 2 LPM + SimplexDocument66 pages2 LPM + SimplexEndashaw DebruNo ratings yet
- Attendance5 1Document19 pagesAttendance5 1Endashaw DebruNo ratings yet
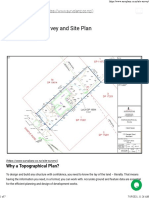
- Topographical Survey and Site Plan - SurvplanzDocument7 pagesTopographical Survey and Site Plan - SurvplanzEndashaw DebruNo ratings yet
- Solution of LPP by Graphical MethodDocument9 pagesSolution of LPP by Graphical MethodEndashaw DebruNo ratings yet
- Activity 2.1Document1 pageActivity 2.1Endashaw DebruNo ratings yet
- 2 LPM + SimplexDocument66 pages2 LPM + SimplexEndashaw DebruNo ratings yet
- CH-IV Planning and Decision MakingDocument36 pagesCH-IV Planning and Decision MakingEndashaw DebruNo ratings yet
- Geodesia Fisica Physical Geodesy From SaDocument35 pagesGeodesia Fisica Physical Geodesy From SaEndashaw DebruNo ratings yet
- Articulo 1 - ListoDocument12 pagesArticulo 1 - ListoJean BernalNo ratings yet
- A Compedium of Physical Geodesy: Lecture Notes in Earth Sciences January 1995Document68 pagesA Compedium of Physical Geodesy: Lecture Notes in Earth Sciences January 1995Endashaw DebruNo ratings yet
- Science of The Total Environment: Contents Lists Available atDocument18 pagesScience of The Total Environment: Contents Lists Available atEndashaw DebruNo ratings yet
- Evaluating Recent Global Geopotential Models for Turkish Rail ProjectDocument10 pagesEvaluating Recent Global Geopotential Models for Turkish Rail ProjectEndashaw DebruNo ratings yet
- Introduction to Physical GeodesyDocument53 pagesIntroduction to Physical GeodesyEndashaw Debru100% (1)
- Physical Geodesy - Petr VanicekDocument187 pagesPhysical Geodesy - Petr VanicekPepe FC100% (2)
- What Is GeodesyDocument4 pagesWhat Is GeodesyEndashaw DebruNo ratings yet
- 3.2 - DatumsDocument6 pages3.2 - DatumsEndashaw DebruNo ratings yet
- ISPRS Journal of Photogrammetry and Remote SensingDocument12 pagesISPRS Journal of Photogrammetry and Remote SensingEndashaw DebruNo ratings yet
- Transformations (3D - Position)Document5 pagesTransformations (3D - Position)Endashaw DebruNo ratings yet
- 3.7 Gravitational Potential, Mass Anomalies and The Geoid - Geosciences LibreTextsDocument6 pages3.7 Gravitational Potential, Mass Anomalies and The Geoid - Geosciences LibreTextsEndashaw DebruNo ratings yet
- Remote Sensing of Environment: Andrea Ciampalini, Federico Raspini, Daniela Lagomarsino, Filippo Catani, Nicola CasagliDocument14 pagesRemote Sensing of Environment: Andrea Ciampalini, Federico Raspini, Daniela Lagomarsino, Filippo Catani, Nicola CasagliEndashaw DebruNo ratings yet
- What Is GeodesyDocument4 pagesWhat Is GeodesyEndashaw DebruNo ratings yet
- Gravity For Geodesy II ApplicationsDocument20 pagesGravity For Geodesy II ApplicationsEndashaw DebruNo ratings yet
- Geometric Aspects of Mapping Coordinate TransformationsDocument1 pageGeometric Aspects of Mapping Coordinate TransformationsEndashaw DebruNo ratings yet
- Geomatic Survey - Ramboll UK LimitedDocument7 pagesGeomatic Survey - Ramboll UK LimitedEndashaw DebruNo ratings yet
- Fundamentals of Geodesy - XyhtDocument8 pagesFundamentals of Geodesy - XyhtEndashaw DebruNo ratings yet
- Geoid - The Contribution of Orbiting Satellites BritannicaDocument30 pagesGeoid - The Contribution of Orbiting Satellites BritannicaEndashaw DebruNo ratings yet
- Earth CoordinatesDocument5 pagesEarth CoordinatesEndashaw DebruNo ratings yet
- Metal Enameling: Arts & CommunicationDocument15 pagesMetal Enameling: Arts & CommunicationAnjali DavidNo ratings yet
- IGCSE Biology 4325 2H Mark SchemeDocument14 pagesIGCSE Biology 4325 2H Mark SchememuhajireenNo ratings yet
- Tables and Bar ChartsDocument7 pagesTables and Bar ChartsVictoria FedoseevaNo ratings yet
- GROHE Specification Sheet 19443000-1Document2 pagesGROHE Specification Sheet 19443000-1Fred PrzNo ratings yet
- Erotic MassageDocument113 pagesErotic MassageMahmoud El Mohamdy75% (4)
- Plasma ChemistryDocument6 pagesPlasma ChemistryArief RomadhonNo ratings yet
- Manual Hoist ProductsDocument40 pagesManual Hoist Productskavin bhagavathyNo ratings yet
- Course Progression Map For 2021 Commencing Students: E3001 Bachelor of Engineering (Honours) Common First YearDocument21 pagesCourse Progression Map For 2021 Commencing Students: E3001 Bachelor of Engineering (Honours) Common First YearNguyễn An KhoaNo ratings yet
- Studyguide TracksDocument75 pagesStudyguide TracksAnonymous FabB2WJl485% (13)
- IRRIGATION ENGINEERING MCQDocument40 pagesIRRIGATION ENGINEERING MCQpriya dharshini100% (1)
- Essay - DnaDocument2 pagesEssay - Dnaapi-243852896No ratings yet
- PSUTIL Documentation for Monitoring System ResourcesDocument77 pagesPSUTIL Documentation for Monitoring System ResourcesImam RiadiNo ratings yet
- Rules For The CertificationDocument84 pagesRules For The CertificationhdelriovNo ratings yet
- Let Us Discover: Hairdressing-Grade 11Document5 pagesLet Us Discover: Hairdressing-Grade 11cherry d.bandolaNo ratings yet
- Differential Equations CookbookDocument2 pagesDifferential Equations CookbookAugustinZNo ratings yet
- Comparative Study of Organic Solvents For Extraction of Copper From Ammoniacal Carbonate Solution Hu2010Document6 pagesComparative Study of Organic Solvents For Extraction of Copper From Ammoniacal Carbonate Solution Hu2010mtanaydinNo ratings yet
- z1875 Caton (BMJ) Electric Currents of The BrainDocument23 pagesz1875 Caton (BMJ) Electric Currents of The BrainUnholy VladNo ratings yet
- Gem EscortingDocument7 pagesGem Escortingsuman sutharNo ratings yet
- 11 Physics Test Paper Ch3 1Document4 pages11 Physics Test Paper Ch3 1Devendar SharmaNo ratings yet
- Legend of Nueva VizcayaDocument10 pagesLegend of Nueva VizcayaAndreanna Maria100% (1)
- Sampling and Field Testing at Wastewater Treatment FacilitiesDocument11 pagesSampling and Field Testing at Wastewater Treatment FacilitiesSundarapandiyan SundaramoorthyNo ratings yet
- Manufacturing Airbrushes Since 1904Document20 pagesManufacturing Airbrushes Since 1904Sa MiNo ratings yet
- EniSpA - The Corporate Strategy of An International Energy Major PDFDocument24 pagesEniSpA - The Corporate Strategy of An International Energy Major PDFAnonymous 9ZMbuR75% (4)
- Radiological Investigations: UltrasonographyDocument42 pagesRadiological Investigations: UltrasonographyDeeptanu GhoshNo ratings yet
- Girbau STI-54 STI-77 Parts ManualDocument74 pagesGirbau STI-54 STI-77 Parts Manualrpm14sheratonbsasNo ratings yet
- Violet Flame Clearing of The Heart ServiceDocument16 pagesViolet Flame Clearing of The Heart ServiceMySecret Gardenmdp82% (11)
- Philips HF C-Arm BrochureDocument2 pagesPhilips HF C-Arm Brochuregarysov50% (2)
- MD R2 Nastran Release GuideDocument276 pagesMD R2 Nastran Release GuideMSC Nastran BeginnerNo ratings yet