You might also like
- Maths Unit 2 ImpDocument6 pagesMaths Unit 2 Impvenkata karthikNo ratings yet
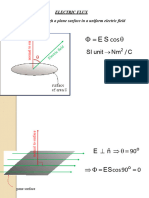
- ELECTRIC FLUX 1 Chapter1 04Document57 pagesELECTRIC FLUX 1 Chapter1 04Shubham TiwariNo ratings yet
- Gradient, Divergence and Curl in Vector CalculusDocument28 pagesGradient, Divergence and Curl in Vector CalculusRo RohadiNo ratings yet
- 5b. MA2001 - Vector Integral Calculus (Surface Integral) PDFDocument22 pages5b. MA2001 - Vector Integral Calculus (Surface Integral) PDFMatthew LauNo ratings yet
- The Curse of Dimensionality: Fraunhofer IPK Berlin Pascalstr. 8-9, 10587 Berlin, Germany E-MailDocument22 pagesThe Curse of Dimensionality: Fraunhofer IPK Berlin Pascalstr. 8-9, 10587 Berlin, Germany E-MailSrinivasaNo ratings yet
- Gauss's Law and ApplicationsDocument12 pagesGauss's Law and ApplicationsekkyNo ratings yet
- 1a - Calculus Review - Infinite SeriesDocument19 pages1a - Calculus Review - Infinite SeriesazabekNo ratings yet
- Analytic GeometryDocument53 pagesAnalytic GeometrySupriyo ChakrabortyNo ratings yet
- Chapter 5 - Strain TransformationDocument83 pagesChapter 5 - Strain TransformationLai Swee YongNo ratings yet
- Formula List-Math 2720Document1 pageFormula List-Math 2720Cikgu ChongNo ratings yet
- Advanced CAD-SurfacesDocument186 pagesAdvanced CAD-SurfacesBarış ÇayNo ratings yet
- Arc Length PDFDocument2 pagesArc Length PDFMR éxypnosNo ratings yet
- APhO 2017 Theory 1 SolutionDocument18 pagesAPhO 2017 Theory 1 SolutionmpecthNo ratings yet
- Wang,Kaixin (1)Document13 pagesWang,Kaixin (1)sergenNo ratings yet
- SESM3004 Fluid Mechanics: DR Anatoliy VorobevDocument16 pagesSESM3004 Fluid Mechanics: DR Anatoliy VorobevRN Builder IpohNo ratings yet
- AP AB ManualDocument53 pagesAP AB ManualStanleyNo ratings yet
- BS-VII MSc-IIIDocument64 pagesBS-VII MSc-IIIwajeehawisalNo ratings yet
- 2) - Gauss' Law and Applications: R Q Q 4 1 Q Q 4 1Document18 pages2) - Gauss' Law and Applications: R Q Q 4 1 Q Q 4 1Gillu SinghNo ratings yet
- Lecture 17Document20 pagesLecture 17Dande LionNo ratings yet
- Propagation of electromagnetic waves in 3DDocument20 pagesPropagation of electromagnetic waves in 3DDande LionNo ratings yet
- Dome SynchronisationDocument20 pagesDome Synchronisationmaurice falzonNo ratings yet
- Graphs of Some Functions: Geometrical Applications of Definite Integral Lesson 9 9.1. ParabolasDocument15 pagesGraphs of Some Functions: Geometrical Applications of Definite Integral Lesson 9 9.1. ParabolasAlzerusNo ratings yet
- 06 CH.6 Conic SectionsDocument21 pages06 CH.6 Conic SectionsAfrazia UmerNo ratings yet
- CIRCLE EQUATIONDocument35 pagesCIRCLE EQUATIONKulbir SinghNo ratings yet
- UntitledDocument73 pagesUntitledchandrakanth maheshNo ratings yet
- MO201Document88 pagesMO201nishaNo ratings yet
- PRECAL_LESSON 1Document6 pagesPRECAL_LESSON 1alayca cabatanaNo ratings yet
- Free Vibration Analysis of Conical Shells Via The Element-Free Kp-Ritz MethodDocument19 pagesFree Vibration Analysis of Conical Shells Via The Element-Free Kp-Ritz MethodjssrikantamurthyNo ratings yet
- 18MAT11 Important Problems PDFDocument6 pages18MAT11 Important Problems PDFRif Riz100% (5)
- Sankalp Sheet - 7 Lectures 11: ATOMIC STRUCTURE Schrödinger's Wave Equation, Plots of (Probability of Finding E), R, R, 4 - RDocument2 pagesSankalp Sheet - 7 Lectures 11: ATOMIC STRUCTURE Schrödinger's Wave Equation, Plots of (Probability of Finding E), R, R, 4 - RGcgNo ratings yet
- Rules For Making Root Locus Plots: Rule Name DescriptionDocument2 pagesRules For Making Root Locus Plots: Rule Name DescriptionJUAN DAVID BECERRA MOLANONo ratings yet
- Plastic-Deformation Analysis in Tube Bending: N.C. TangDocument9 pagesPlastic-Deformation Analysis in Tube Bending: N.C. Tangeko123No ratings yet
- Functions of Sev Var 21Document19 pagesFunctions of Sev Var 21Mohamed DORBANENo ratings yet
- Centroids & Centers of GravityDocument8 pagesCentroids & Centers of GravityElle HeartfiliaNo ratings yet
- EMT and Fiber Optics - 2021Document166 pagesEMT and Fiber Optics - 2021runnercode.803No ratings yet
- GraphsDocument7 pagesGraphsArin SinghNo ratings yet
- Cu 31924001522782Document148 pagesCu 31924001522782User 1No ratings yet
- Fluid Mechanics 3 - 4: Incompressible Potential FlowsDocument28 pagesFluid Mechanics 3 - 4: Incompressible Potential FlowsDrEmadEl-SaidNo ratings yet
- 1 CirclesDocument12 pages1 CirclesjackieshanthekingNo ratings yet
- List of Math Formulas Xii Class I TermDocument14 pagesList of Math Formulas Xii Class I Termbannetusharq338No ratings yet
- Principles of Constraint Programming Ch5-SliDocument39 pagesPrinciples of Constraint Programming Ch5-SligldstarNo ratings yet
- Evolution of Matter from Simple to ComplexDocument108 pagesEvolution of Matter from Simple to ComplexArshe OmaguingNo ratings yet
- Find Angle and Distance Between Skew LinesDocument5 pagesFind Angle and Distance Between Skew LinesRaghuveer ChandraNo ratings yet
- Awesome Formula SheetDocument12 pagesAwesome Formula Sheetsurendranath jadhavNo ratings yet
- Root Locus RulesDocument2 pagesRoot Locus RulesTehe SaglamNo ratings yet
- Fluid Dynamics FinalDocument330 pagesFluid Dynamics FinalabhishekNo ratings yet
- Quantum Theory of The Hydrogen AtomDocument72 pagesQuantum Theory of The Hydrogen AtomPallavi SinghNo ratings yet
- Mid Term Test - : SolutionsDocument11 pagesMid Term Test - : SolutionsJuju JantonNo ratings yet
- Cylindrical Coordinate System FDocument14 pagesCylindrical Coordinate System FRajeshNo ratings yet
- Homework SolutionDocument13 pagesHomework Solutionguadbe878No ratings yet
- Ch4 Basic Vortex DynamicsDocument25 pagesCh4 Basic Vortex Dynamicsd92543013100% (1)
- Fundamentals of Photonics: CH 1: Ray OpticsDocument51 pagesFundamentals of Photonics: CH 1: Ray OpticsYu Tak LeeNo ratings yet
- Lecture No.3 Elements of Three Dimensional Geometry Distance Formula in Three DimensionsDocument8 pagesLecture No.3 Elements of Three Dimensional Geometry Distance Formula in Three DimensionsTayyab HusaainNo ratings yet
- Investigations On Cylindrical Microphone Arrays 2012 - Ambisym - Corrected14032012Document4 pagesInvestigations On Cylindrical Microphone Arrays 2012 - Ambisym - Corrected14032012DizzixxNo ratings yet
- CHE4114 Symmetry L2Document15 pagesCHE4114 Symmetry L2zahara99121No ratings yet
- Laplace & Poisson EquationsDocument12 pagesLaplace & Poisson EquationsHaniya FathimaNo ratings yet
- Dav-Ger Exp Wave-Particle DualityDocument16 pagesDav-Ger Exp Wave-Particle DualityengshimaaNo ratings yet
- Contemporary Pre Calculus Textbook PDFDocument1,095 pagesContemporary Pre Calculus Textbook PDFchenzhehuahotmail.com100% (5)
- L10 DynamicDocument22 pagesL10 DynamicApple ForScaleNo ratings yet
- L11Image TransformationDocument23 pagesL11Image TransformationApple ForScaleNo ratings yet
- Understanding Image Brightness and RadiometryDocument14 pagesUnderstanding Image Brightness and RadiometryApple ForScaleNo ratings yet
- L8 Fundamental of Imgae FormationDocument27 pagesL8 Fundamental of Imgae FormationApple ForScaleNo ratings yet
- L7.Image GeometryDocument47 pagesL7.Image GeometryApple ForScaleNo ratings yet
- L1-L3 Computer VisionDocument15 pagesL1-L3 Computer VisionApple ForScaleNo ratings yet
- CourseHandout - Computer Vision CS4158Document9 pagesCourseHandout - Computer Vision CS4158Apple ForScaleNo ratings yet
- Cetirizine TabletDocument2 pagesCetirizine Tabletgrace_febiantyNo ratings yet
- Data Communication: Lecturer: Tamanna Haque NipaDocument20 pagesData Communication: Lecturer: Tamanna Haque NipaAlokTripathiNo ratings yet
- PLC Based Solar Panel With Tilting Arrangement: April 2016Document9 pagesPLC Based Solar Panel With Tilting Arrangement: April 2016Paul TodericNo ratings yet
- Sizechange Calculator V 0.6Document1 pageSizechange Calculator V 0.6Arthur Dutra ReccoNo ratings yet
- Confined Space Safety GuideDocument6 pagesConfined Space Safety GuiderigelNo ratings yet
- TFR ExperimentDocument25 pagesTFR ExperimentSiti Norbaya100% (1)
- GPIB Communication and Hardware SpecificationsDocument5 pagesGPIB Communication and Hardware Specificationsshofika SelvarajNo ratings yet
- Determination of Mechanical Properties For Cement-Treated Aggregate BaseDocument54 pagesDetermination of Mechanical Properties For Cement-Treated Aggregate BaseMarloNo ratings yet
- Manual Tupia MAKITA 2301Document16 pagesManual Tupia MAKITA 2301proftononNo ratings yet
- Class XII Monthly Test Revision on d-Block ElementsDocument6 pagesClass XII Monthly Test Revision on d-Block ElementsANUBHAV YADAVNo ratings yet
- MVB-UART DatasheetDocument24 pagesMVB-UART DatasheetmrezafarahrazNo ratings yet
- Hydrometallurgical Extraction ProcessesDocument41 pagesHydrometallurgical Extraction ProcessesRizan Saputra117No ratings yet
- 3 D Via Composer Error LogDocument9 pages3 D Via Composer Error LogNilesh A. KhedekarNo ratings yet
- Engineering Graphics Exam Drawing ProblemsDocument2 pagesEngineering Graphics Exam Drawing ProblemsSalim Saifudeen SaifudeenNo ratings yet
- 2 Infiltration SystemsDocument63 pages2 Infiltration SystemsBURHAANN RUBANINo ratings yet
- GRE Math 강좌 Set 1Document25 pagesGRE Math 강좌 Set 1Hee_Eun_Jang_6656100% (1)
- Identity MineralDocument5 pagesIdentity MineralOl SreylinNo ratings yet
- 01 To UTBK Full Version (SAINTEK) - Bahasa InggrisDocument8 pages01 To UTBK Full Version (SAINTEK) - Bahasa Inggrissepia wulandariNo ratings yet
- GATE Preparation Tips and Study PlanDocument3 pagesGATE Preparation Tips and Study PlanManish KushwahaNo ratings yet
- Python Coding ClubDocument36 pagesPython Coding ClubBlue GirlNo ratings yet
- Quality and Statistical Quality ControlDocument36 pagesQuality and Statistical Quality ControlAnkit SrivastavaNo ratings yet
- Water Softening and Demineralization: Pengolahan Air Dan Limbah Industri DTK 2019Document97 pagesWater Softening and Demineralization: Pengolahan Air Dan Limbah Industri DTK 2019Aldi RahmatNo ratings yet
- Optical and Near-Infrared Spectroscopy of The Black Hole Transient 4U 1543-47 During Its 2021 Ultra-Luminous StateDocument12 pagesOptical and Near-Infrared Spectroscopy of The Black Hole Transient 4U 1543-47 During Its 2021 Ultra-Luminous StateAndrea HermosaNo ratings yet
- Introduction To Structural AnalysisDocument15 pagesIntroduction To Structural AnalysisShereen RodrigoNo ratings yet
- Eurocode Assessment For BridgesDocument12 pagesEurocode Assessment For BridgesrenandNo ratings yet
- BS Iso 12817-2013Document28 pagesBS Iso 12817-2013Ігор БадюкевичNo ratings yet
- Aerodynamics and Aircraft Design SoftwareDocument13 pagesAerodynamics and Aircraft Design SoftwareAnonymous 1rLNlqUNo ratings yet
- Two-Way Anova InteractionDocument9 pagesTwo-Way Anova InteractionImane ChatouiNo ratings yet