You might also like
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64From EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No ratings yet
- Cosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121From EverandCosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121No ratings yet
- WINSEM2017-18 - EEE4027 - ETH - TT424 - VL2017185001605 - Reference Material I - Robot KinematicsDocument42 pagesWINSEM2017-18 - EEE4027 - ETH - TT424 - VL2017185001605 - Reference Material I - Robot KinematicsNishant KamalNo ratings yet
- Mekatronika Xiv (Ok)Document74 pagesMekatronika Xiv (Ok)Agus IkiNo ratings yet
- Robot Arm KinematicsDocument13 pagesRobot Arm KinematicsMohit SanandiyaNo ratings yet
- Unit 3: Robot Kinematics: Position AnalysisDocument54 pagesUnit 3: Robot Kinematics: Position AnalysisPRINCE RAJNo ratings yet
- Module 4 - Lecture PPT 1Document35 pagesModule 4 - Lecture PPT 1Saksham Rathi 19BEC1209No ratings yet
- Chapter 2 - Robot KinematicsDocument35 pagesChapter 2 - Robot KinematicsRaman KumarNo ratings yet
- Robot Kinematics LECTURE 1Document36 pagesRobot Kinematics LECTURE 1Samuel AdenijiNo ratings yet
- Zah4 Rac4 PDFDocument35 pagesZah4 Rac4 PDFZaheer AhamedNo ratings yet
- Lec2 Forward KinematicsDocument22 pagesLec2 Forward KinematicsbalkyderNo ratings yet
- ME 4135 Robot Matrices L3Document55 pagesME 4135 Robot Matrices L3Leonardo SibaraniNo ratings yet
- Lecture 5Document10 pagesLecture 5Daniel PaggiattoNo ratings yet
- Kinematics: Amirkabir University of Technology Computer Engineering & Information Technology DepartmentDocument47 pagesKinematics: Amirkabir University of Technology Computer Engineering & Information Technology DepartmentAIrobotNo ratings yet
- CH01 - Kinematics of A ParticleDocument80 pagesCH01 - Kinematics of A ParticleToby IsabiNo ratings yet
- 0251a035cda10-1 - Kinematics TheoryDocument67 pages0251a035cda10-1 - Kinematics Theorycharan dheepNo ratings yet
- 2012-1807. Kinematics Robot ManipulatorsDocument39 pages2012-1807. Kinematics Robot Manipulatorssudhanshu22kumar22No ratings yet
- An Introduction To Robot Kinematics: Renata MelamudDocument42 pagesAn Introduction To Robot Kinematics: Renata MelamudpoojaNo ratings yet
- An Introduction To Robot KinematicsDocument42 pagesAn Introduction To Robot KinematicsHisyam Abdul AzizNo ratings yet
- Lecturer 7: Camera Calibration: Dandhi Kuswardhana, PH.D: EL462/ Visi KomputerDocument41 pagesLecturer 7: Camera Calibration: Dandhi Kuswardhana, PH.D: EL462/ Visi KomputerHilal IsmailNo ratings yet
- Robot Kinematics - TransformationDocument57 pagesRobot Kinematics - TransformationHoney RathoreNo ratings yet
- Chapter 6 - 6 Robot TechnologyDocument71 pagesChapter 6 - 6 Robot TechnologyHEMANTCHANDRANo ratings yet
- 53 - 36765 - ME594 - 2014 - 1 - 2 - 1 - Homogeneous TransformationDocument21 pages53 - 36765 - ME594 - 2014 - 1 - 2 - 1 - Homogeneous TransformationHariharanNo ratings yet
- Three-Dimensional TransformationDocument46 pagesThree-Dimensional Transformationreem goNo ratings yet
- Robot Movement in SpaceDocument11 pagesRobot Movement in Spacekanuni41No ratings yet
- Kinematic Analysis of Stanford ArmDocument31 pagesKinematic Analysis of Stanford ArmabhishekNo ratings yet
- Cook 18 Va SesionDocument8 pagesCook 18 Va SesionAlejandro MalvaezNo ratings yet
- Transformasi Koordinat RobotDocument42 pagesTransformasi Koordinat RobotRama Gian HendralokaNo ratings yet
- 3D TransformationDocument41 pages3D TransformationmidhunaNo ratings yet
- Chapter 2 Spatial Descriptions and TransformationsDocument99 pagesChapter 2 Spatial Descriptions and TransformationsKeith wongNo ratings yet
- UNITII of Computer VisionDocument99 pagesUNITII of Computer VisionAvadhraj VermaNo ratings yet
- Jacobians:: Velocities and Static ForceDocument30 pagesJacobians:: Velocities and Static ForceKo PyaeNo ratings yet
- Robot Modeling: 3/11/2020 Robotics (EP-5532) 1Document64 pagesRobot Modeling: 3/11/2020 Robotics (EP-5532) 1goitom01No ratings yet
- CNC II Robot Technology 5 - KinematicsDocument42 pagesCNC II Robot Technology 5 - KinematicschikamelsaNo ratings yet
- Three Dimensional Modeling TransformationsDocument35 pagesThree Dimensional Modeling Transformationsمصطفى غالب جونيNo ratings yet
- Lec3 Forward KinematicsDocument18 pagesLec3 Forward KinematicsbalkyderNo ratings yet
- 5 TransformationsDocument66 pages5 TransformationsPratik MalviyaNo ratings yet
- Robot KinematicsDocument44 pagesRobot KinematicsKannaneight BalaNo ratings yet
- Coordinate Systems: MW MW MW MW MWDocument4 pagesCoordinate Systems: MW MW MW MW MWSuresh NatarajanNo ratings yet
- DynamicsDocument41 pagesDynamicsHùng TrầnNo ratings yet
- Robot Dynamics PDFDocument56 pagesRobot Dynamics PDFPuru GaurNo ratings yet
- Harmonic Oscillator PDFDocument8 pagesHarmonic Oscillator PDFŘoul ŤapanNo ratings yet
- 2D Transformations: Computer GraphicsDocument25 pages2D Transformations: Computer Graphicssmile067No ratings yet
- CH 4 Force System ResultantsDocument20 pagesCH 4 Force System ResultantsSteven ColeyNo ratings yet
- CAED KJHA 2d TransformationDocument114 pagesCAED KJHA 2d TransformationAnu SinghNo ratings yet
- An Introduction To Robot Kinematics: Renata MelamudDocument42 pagesAn Introduction To Robot Kinematics: Renata MelamudCristina ResceanuNo ratings yet
- Robot Forward InverseDocument41 pagesRobot Forward Inversemeen87No ratings yet
- Introduction To ROBOTICS: Robot Kinematics IIDocument46 pagesIntroduction To ROBOTICS: Robot Kinematics IIsureshbtNo ratings yet
- Jacobians-Differential KinematicsDocument62 pagesJacobians-Differential KinematicsChay Tick FeiNo ratings yet
- 3-D Transformations: Figure 5.33 Geometric 3-D TransformationDocument7 pages3-D Transformations: Figure 5.33 Geometric 3-D TransformationGaytri DhingraNo ratings yet
- LN 3 Motion in 2DDocument40 pagesLN 3 Motion in 2DPraveen SNo ratings yet
- 11 - Kinematics-01 - TheoryDocument19 pages11 - Kinematics-01 - TheoryRaju SinghNo ratings yet
- 03 2D-3D GeometryDocument77 pages03 2D-3D GeometryTuseeq RazaNo ratings yet
- Lect3 04022011 PDFDocument89 pagesLect3 04022011 PDFHoney JanguNo ratings yet
- Kinematics: Describe The Dynamics:study The Statitcs: Objects inDocument6 pagesKinematics: Describe The Dynamics:study The Statitcs: Objects innoNo ratings yet
- Chapter 5: Transformations With Matrices: Xy X' Y'Document15 pagesChapter 5: Transformations With Matrices: Xy X' Y'Oliver LeeNo ratings yet
- Spatial Descriptions and Transformation: (Chapter 2)Document59 pagesSpatial Descriptions and Transformation: (Chapter 2)Tooba Sami ArifeenNo ratings yet
- Physics KinematicsDocument80 pagesPhysics KinematicspremsempireNo ratings yet
- Computer Graphics 2D Affine TransformationDocument16 pagesComputer Graphics 2D Affine TransformationabbaqnadeemNo ratings yet
- Introduction To RoboticsDocument60 pagesIntroduction To RoboticsJOEL STEPHEN 19BEE0262No ratings yet
- Home Automation Using Chatbot and Voice AssistantDocument5 pagesHome Automation Using Chatbot and Voice AssistantJOEL STEPHEN 19BEE0262No ratings yet
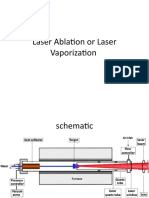
- Laser Ablation or Laser VaporizationDocument4 pagesLaser Ablation or Laser VaporizationJOEL STEPHEN 19BEE0262No ratings yet
- WINSEM2022-23 EEE1018 TH VL2022230503359 ReferenceMaterialI ThuFeb0200 00 00IST2023 CNTbasicsDocument28 pagesWINSEM2022-23 EEE1018 TH VL2022230503359 ReferenceMaterialI ThuFeb0200 00 00IST2023 CNTbasicsJOEL STEPHEN 19BEE0262No ratings yet
- WINSEM2022-23 EEE1018 TH VL2022230503359 ReferenceMaterialI MonFeb1300 00 00IST2023 ElectronmicrosDocument23 pagesWINSEM2022-23 EEE1018 TH VL2022230503359 ReferenceMaterialI MonFeb1300 00 00IST2023 ElectronmicrosJOEL STEPHEN 19BEE0262No ratings yet
- LECTURE 6 Scanning Probe Microscopy (AFM)Document17 pagesLECTURE 6 Scanning Probe Microscopy (AFM)JOEL STEPHEN 19BEE0262No ratings yet
- Ion ImplantationDocument4 pagesIon ImplantationJOEL STEPHEN 19BEE0262No ratings yet
- WINSEM2022-23 EEE1018 TH VL2022230503359 ReferenceMaterialI SatFeb0400 00 00IST2023 CVD-CoMoCAT-HIPCO-catalysttypesDocument21 pagesWINSEM2022-23 EEE1018 TH VL2022230503359 ReferenceMaterialI SatFeb0400 00 00IST2023 CVD-CoMoCAT-HIPCO-catalysttypesJOEL STEPHEN 19BEE0262No ratings yet
- 10.213 Chemical Engineering Thermodynamics Spring 2002 Problem Set DDocument2 pages10.213 Chemical Engineering Thermodynamics Spring 2002 Problem Set DPM SHNo ratings yet
- 1966 Some Nonlinear Studies On Liquid Sloshing AbramsonDocument42 pages1966 Some Nonlinear Studies On Liquid Sloshing AbramsonAnirudh SabooNo ratings yet
- Review of Tribological Characteristics of Modified PEEK CompositesDocument6 pagesReview of Tribological Characteristics of Modified PEEK CompositesVIVA-TECH IJRINo ratings yet
- Electrostatics DPPDocument39 pagesElectrostatics DPPdbhardwaj86No ratings yet
- Turbo-Brayton Subcooler: For Liquefied Natural Gas (LNG) Boil-Off ReliquefactionDocument2 pagesTurbo-Brayton Subcooler: For Liquefied Natural Gas (LNG) Boil-Off ReliquefactionLakshmanan SreenivasanNo ratings yet
- SPM Trial 2013 Physics Qa Pahang PDFDocument90 pagesSPM Trial 2013 Physics Qa Pahang PDFLojk LeongNo ratings yet
- Alexander Binzel Schweisstechnik GMBH & Co. KG P.O. Box 10 01 53 D-35331 Gießen Phone: +49 (0) 64 08 / 59-0 Fax: +49 (0) 64 08 / 59-191Document8 pagesAlexander Binzel Schweisstechnik GMBH & Co. KG P.O. Box 10 01 53 D-35331 Gießen Phone: +49 (0) 64 08 / 59-0 Fax: +49 (0) 64 08 / 59-191Arda YazıcıNo ratings yet
- Master Jee Classes: Kukatpally, HyderabadDocument42 pagesMaster Jee Classes: Kukatpally, HyderabadVLSISD23 KORRA NIKHILNo ratings yet
- Planar Kinematics of A Rigid Body - 1Document26 pagesPlanar Kinematics of A Rigid Body - 1Isaac ItodoNo ratings yet
- Practical 4 PhysicsDocument11 pagesPractical 4 PhysicsSpeed ZonesNo ratings yet
- CAD LAB 6 RLC CompletedDocument9 pagesCAD LAB 6 RLC Completed2022ee363No ratings yet
- Capacitor Solution For Bi-Xenon Complete DIY: Home Forums Tuning & Tech Lighting ForumDocument16 pagesCapacitor Solution For Bi-Xenon Complete DIY: Home Forums Tuning & Tech Lighting ForumrubiogomesNo ratings yet
- LP CF DN39XB EU - enDocument9 pagesLP CF DN39XB EU - enit4728No ratings yet
- Power System Analysis and Design 6th Edition Glover Test BankDocument14 pagesPower System Analysis and Design 6th Edition Glover Test BankMatthewGreenefgjtb100% (22)
- CascadaServMan RODocument18 pagesCascadaServMan ROSiddarth100% (1)
- SRM Material PDFDocument290 pagesSRM Material PDFSri Sathwik PadalaNo ratings yet
- Wiring Unit WU-3A: User's ManualDocument24 pagesWiring Unit WU-3A: User's ManualMarcos Peñaranda TintayaNo ratings yet
- Increasing Water Evaporation Rate by Magnetic Field: September 2013Document9 pagesIncreasing Water Evaporation Rate by Magnetic Field: September 2013Moon SunNo ratings yet
- Grundfos Packaged Solutions: Grundfos Americas Brookshire, TX 77423 WWW - Grundfos.usDocument8 pagesGrundfos Packaged Solutions: Grundfos Americas Brookshire, TX 77423 WWW - Grundfos.usJhon Jairo Arango MarquezNo ratings yet
- SOM Project Diploma CLGDocument9 pagesSOM Project Diploma CLGJoshua KondkarNo ratings yet
- Pec Eval Exam 3Document29 pagesPec Eval Exam 3Joel JusayNo ratings yet
- Periodic Table of ElectronegativityDocument1 pagePeriodic Table of ElectronegativitycountdankNo ratings yet
- Plasma TechnologyDocument27 pagesPlasma TechnologyAtul Mittal100% (2)
- Appendix A. Thermodynamic Parameters PDFDocument10 pagesAppendix A. Thermodynamic Parameters PDFMawar Rahmah AnggrainiNo ratings yet
- DINテストDocument6 pagesDINテストSAMRAT SILNo ratings yet
- O2 PST - OxygenDocument12 pagesO2 PST - OxygenM.K.KARTHIKEYANNo ratings yet
- Chem1012 CH04 PowerPointDocument28 pagesChem1012 CH04 PowerPointIsrael HaileNo ratings yet
- UFT250-12 Physical Specification: SpecificationsDocument2 pagesUFT250-12 Physical Specification: SpecificationsHuber CallataNo ratings yet
- Film Characteristic CurvesDocument7 pagesFilm Characteristic CurvesvinaNo ratings yet
- Roborock S7MaxV Ultra CE User ManualDocument17 pagesRoborock S7MaxV Ultra CE User Manualmorsmordre05No ratings yet