You might also like
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Chapter 1 (Assembly)Document32 pagesChapter 1 (Assembly)haroonhaniNo ratings yet
- Microprocessor Lec No.1Document26 pagesMicroprocessor Lec No.1bashirahmed bashirahmedNo ratings yet
- Microcomputer and System BUSDocument25 pagesMicrocomputer and System BUSRocky Samrat100% (1)
- Unit-VI Introduction To Computer ArchitectureDocument24 pagesUnit-VI Introduction To Computer ArchitecturerajdattaNo ratings yet
- Ecpc-308 15Document140 pagesEcpc-308 15chinusood08No ratings yet
- Chapter 2 - Hardware Architecture and InterfacingDocument24 pagesChapter 2 - Hardware Architecture and InterfacingroshanNo ratings yet
- 4 - Clock, Instruction Rep, CycleDocument29 pages4 - Clock, Instruction Rep, CycleHuma IqrarNo ratings yet
- 3-Module 1-04-Aug-2021material II 04-Aug-2021 Unit 1 Presentation 2Document32 pages3-Module 1-04-Aug-2021material II 04-Aug-2021 Unit 1 Presentation 2jeevaaNo ratings yet
- William Stallings Computer Organization and Architecture 8 EditionDocument59 pagesWilliam Stallings Computer Organization and Architecture 8 EditionjumarNo ratings yet
- Co-2 - CoaDocument46 pagesCo-2 - CoaDAVU REVANTH NAGNo ratings yet
- Coa 21.7.18Document365 pagesCoa 21.7.18Chetann DongarsaneNo ratings yet
- Cod Unit 2Document44 pagesCod Unit 2anilNo ratings yet
- Intro To Microcomputers: Block Diagram of A Typical MicrocomputerDocument6 pagesIntro To Microcomputers: Block Diagram of A Typical MicrocomputerShaheer TariqNo ratings yet
- COD Unit 2 PDFDocument49 pagesCOD Unit 2 PDFYash Gupta MauryaNo ratings yet
- BFM3333 Course: Microcontroller SystemDocument33 pagesBFM3333 Course: Microcontroller SystemMostafa AbdulmalekNo ratings yet
- Introduction To Microcontrollers: ECE473/573 Microprocessor System Design, Dr. Shiue 1Document14 pagesIntroduction To Microcontrollers: ECE473/573 Microprocessor System Design, Dr. Shiue 1zaheer_ahamed2000No ratings yet
- What Is RegisterDocument2 pagesWhat Is RegisterHaris AkramNo ratings yet
- Lec 1 Introduction To MiocroprocessorDocument21 pagesLec 1 Introduction To Miocroprocessor21201151No ratings yet
- Lec03 - Processor Structure and FunctionDocument55 pagesLec03 - Processor Structure and FunctionDavid WongNo ratings yet
- Following Is The List of Some of The Most Common Registers Used in A Basic ComputerDocument12 pagesFollowing Is The List of Some of The Most Common Registers Used in A Basic Computerrajesh5500No ratings yet
- Basic Structure of Computer ArchitectureDocument53 pagesBasic Structure of Computer Architecturenikhilmalagi0% (1)
- 3.1 Components of Central Processing UnitDocument15 pages3.1 Components of Central Processing Unithazardahmed132No ratings yet
- Chapter 2Document37 pagesChapter 2johnNo ratings yet
- Introduction To Mechatronics: Microcontrollers and MicroprocessorsDocument12 pagesIntroduction To Mechatronics: Microcontrollers and MicroprocessorsAmanuel tadiwosNo ratings yet
- The Central Processing UnitDocument4 pagesThe Central Processing UnitRafena MustaphaNo ratings yet
- Register SymbolDocument5 pagesRegister SymbolAdnan AliNo ratings yet
- Presentation 1Document33 pagesPresentation 1Fredy F RNo ratings yet
- MPMC IDocument109 pagesMPMC Ishivank mishraNo ratings yet
- CENG 365 Microprocessor UENR Unit 1Document65 pagesCENG 365 Microprocessor UENR Unit 1Blessing CheremehNo ratings yet
- Chapter 4 Processor - 2014Document71 pagesChapter 4 Processor - 2014world channelNo ratings yet
- Lec 2Document21 pagesLec 2Prateek GoyalNo ratings yet
- CPU RegistersDocument7 pagesCPU Registersandreaxxx1023No ratings yet
- Basic Computer Organization and DesignDocument20 pagesBasic Computer Organization and DesignMag Creation100% (1)
- 18Csc203J:Computer Organization and ArchitectureDocument56 pages18Csc203J:Computer Organization and ArchitectureSENTHIL RNo ratings yet
- First Year CH 3Document10 pagesFirst Year CH 3PISD DohaNo ratings yet
- Coa 5Document37 pagesCoa 5pahujahimankNo ratings yet
- Microprocessor: Mbeya University of Science and Technology Department of Electronics and Telecommunication EngineeringDocument30 pagesMicroprocessor: Mbeya University of Science and Technology Department of Electronics and Telecommunication EngineeringEM NemiNo ratings yet
- Unit 01: BEE-15ADocument22 pagesUnit 01: BEE-15APrashant SinghNo ratings yet
- Intro To MPDocument22 pagesIntro To MP211902020No ratings yet
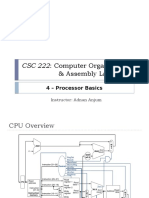
- CSC 222: Computer Organization: & Assembly LanguageDocument22 pagesCSC 222: Computer Organization: & Assembly Languageذیشان چودھریNo ratings yet
- 03-Top Level View of Computer Function and Interconnection-Update-2022!09!21Document73 pages03-Top Level View of Computer Function and Interconnection-Update-2022!09!21Haikal GustiansyahNo ratings yet
- Microprocessors & InterfacingDocument255 pagesMicroprocessors & InterfacingSasi BhushanNo ratings yet
- Ch03 OperationDocument57 pagesCh03 OperationHASHIR KHANNo ratings yet
- Computer Architecture: Ancy Jerald I ST MSC, 2 Sem Dept of Physics ST Xavier'S College ThumbaDocument40 pagesComputer Architecture: Ancy Jerald I ST MSC, 2 Sem Dept of Physics ST Xavier'S College ThumbaFredy F RNo ratings yet
- 2 Central Processing Unit PDFDocument68 pages2 Central Processing Unit PDFمعتز العجيليNo ratings yet
- Lecture Note 292311150242100Document101 pagesLecture Note 292311150242100ETCi-101Monalisa RayNo ratings yet
- Coa 2nd LessonDocument17 pagesCoa 2nd LessonMukeshNo ratings yet
- E 4160 Introduction To MicroprocessorDocument39 pagesE 4160 Introduction To MicroprocessorSyaz ZanaNo ratings yet
- Chap1 Program TranslationDocument43 pagesChap1 Program TranslationBachiNo ratings yet
- Chapter 3CEDocument19 pagesChapter 3CEMohammedNo ratings yet
- Computing Systems OrganizationDocument22 pagesComputing Systems Organizationifti_scriNo ratings yet
- Ict L3Document71 pagesIct L3Asra KhalidNo ratings yet
- Cscoarppt003 PDFDocument22 pagesCscoarppt003 PDFRe ErNo ratings yet
- Control UnitDocument16 pagesControl UnitReena ExpNo ratings yet
- Ae 773 Applied MechatronicsDocument73 pagesAe 773 Applied Mechatronicsarun_21861208No ratings yet
- Digital Electronics Digital Circuit Arithmetic Bitwise Logical Integer Binary Numbers Central Processing UnitDocument1 pageDigital Electronics Digital Circuit Arithmetic Bitwise Logical Integer Binary Numbers Central Processing UnitPatuan TampuolonNo ratings yet
- COA1Document56 pagesCOA1mayur jagdaleNo ratings yet
- ch3 Computer ArchitectureDocument31 pagesch3 Computer ArchitectureMahesh BasnetNo ratings yet
- CO Unit 1Document43 pagesCO Unit 1Dinkesh JainNo ratings yet
- Technology of MindDocument104 pagesTechnology of MindTechnical BotNo ratings yet
- CP600 Webinar Trends, Alarms and Recipes Rev0Document28 pagesCP600 Webinar Trends, Alarms and Recipes Rev0Fabio Passos GuimaraesNo ratings yet
- Figure 1. The Anatomy of A Scroll BarDocument9 pagesFigure 1. The Anatomy of A Scroll Barboopathi2k3No ratings yet
- Actividad 3 Chat Trabajando SokcetsDocument12 pagesActividad 3 Chat Trabajando Sokcetsedwacademy academiaNo ratings yet
- ViewSonic CDE8620 86 - 4K Wireless Presentation Display (WPD)Document2 pagesViewSonic CDE8620 86 - 4K Wireless Presentation Display (WPD)Henky WijayaNo ratings yet
- Lab Assignment Subject: CryptographyDocument11 pagesLab Assignment Subject: CryptographyriyaNo ratings yet
- SmartFadeML v3.0.1 User Manual RevADocument104 pagesSmartFadeML v3.0.1 User Manual RevAxeporodNo ratings yet
- Nmap Cheat Sheet 2023Document11 pagesNmap Cheat Sheet 2023ketix20201No ratings yet
- Universal Gate - NOR: © 2014 Project Lead The Way, Inc. Digital ElectronicsDocument15 pagesUniversal Gate - NOR: © 2014 Project Lead The Way, Inc. Digital ElectronicseNo ratings yet
- Chapter 8 B GrooverDocument18 pagesChapter 8 B GrooverRizwanNadeemNo ratings yet
- Smart Bag AbstractDocument3 pagesSmart Bag Abstractparidhi kaushikNo ratings yet
- Module 1Document136 pagesModule 1Neha VenugopalNo ratings yet
- CS8691 Unit1 ARTIFICIAL INTELLIGENCE Regulation 2017Document88 pagesCS8691 Unit1 ARTIFICIAL INTELLIGENCE Regulation 2017JEYANTHI maryNo ratings yet
- Bit Plane Slicing and Bit Plane CompressionDocument5 pagesBit Plane Slicing and Bit Plane CompressionSharmila ArunNo ratings yet
- Core Java Course - ReportDocument31 pagesCore Java Course - ReportSubhransu Swain100% (1)
- C Language 2018Document6 pagesC Language 2018asmitNo ratings yet
- SINAMICS Bausteine Fuer TIA Portal S7 1200 1500 07 2021 ENDocument228 pagesSINAMICS Bausteine Fuer TIA Portal S7 1200 1500 07 2021 ENLuis Fernando PaniaguaNo ratings yet
- CH - 1 Getting Started With PythonDocument30 pagesCH - 1 Getting Started With PythonHiromi MinatozakiNo ratings yet
- Static Electricity Dryer Lightning Bolt AtomsDocument10 pagesStatic Electricity Dryer Lightning Bolt AtomsRavi_VNo ratings yet
- Snowflake DBA SQL ScriptsDocument10 pagesSnowflake DBA SQL ScriptsprasemiloNo ratings yet
- Select Assigned Questions: Class Roll No Univ. Rollno. Name AssignedDocument4 pagesSelect Assigned Questions: Class Roll No Univ. Rollno. Name AssignedDeepam AsnaniNo ratings yet
- SEPM Unit3Document11 pagesSEPM Unit3SandyNo ratings yet
- CompDocument45 pagesCompvinayak.singh.220414No ratings yet
- Functional Test Plan TemplateDocument8 pagesFunctional Test Plan TemplateshabiumerNo ratings yet
- Fix Operation Failed With Error 0x0000011B (Windows Cannot Connect To The Printer) PASTI BISAAAADocument15 pagesFix Operation Failed With Error 0x0000011B (Windows Cannot Connect To The Printer) PASTI BISAAAAZhakaria Berta PentakostantaNo ratings yet
- StreamCaster 4200 SC4200 Enhanced Plus DatasheetDocument2 pagesStreamCaster 4200 SC4200 Enhanced Plus DatasheetEvgeniiNo ratings yet
- Career Objective: Embedded Professional (ECEP) at Emertxe Information TechnologiesDocument2 pagesCareer Objective: Embedded Professional (ECEP) at Emertxe Information TechnologiesSanthosh SanthuNo ratings yet
- Practical 6Document19 pagesPractical 6Yogyta SinghNo ratings yet
- DJ 500Document4 pagesDJ 500victor maguerdawaNo ratings yet
- More About SQL in Action - CourseraDocument1 pageMore About SQL in Action - CourseraNhi LeNo ratings yet