You might also like
- Introduction To The 68Hc12 MicrocontrollerDocument28 pagesIntroduction To The 68Hc12 Microcontrollerahetdhaezh100% (2)
- Microcontroller Architecture and Memories 1Document52 pagesMicrocontroller Architecture and Memories 1Hazem AbusalemNo ratings yet
- Microcontroller Vs Microcomputer: Key DifferencesDocument40 pagesMicrocontroller Vs Microcomputer: Key DifferencesNgaa SiemensNo ratings yet
- 57 Ma NotesDocument21 pages57 Ma NotesKajal GoudNo ratings yet
- Mca PPT - New1Document86 pagesMca PPT - New1Ashwini MateNo ratings yet
- Unit 1Document6 pagesUnit 1Sonu zehen001No ratings yet
- Unit 4Document85 pagesUnit 4Chadaram JagadishNo ratings yet
- MicrocontrollersDocument38 pagesMicrocontrollersShashwath kumarNo ratings yet
- MCA Sessional1 2023 24Document87 pagesMCA Sessional1 2023 24Jayraj SONINo ratings yet
- Microprocessor Lecture 1Document18 pagesMicroprocessor Lecture 1ojasbhosale07No ratings yet
- مسيطرات كاملDocument101 pagesمسيطرات كاملahmed aliraqiNo ratings yet
- 8085 Complete Note PDFDocument54 pages8085 Complete Note PDFBipin GhimireNo ratings yet
- Introduction to 8086 MicroprocessorDocument10 pagesIntroduction to 8086 Microprocessorm .doskiNo ratings yet
- Introduction To Microprocessor and Microcomputer ArchitectureDocument6 pagesIntroduction To Microprocessor and Microcomputer Architecturesri vatsaNo ratings yet
- Microprocessor 8085 ArchitectureDocument8 pagesMicroprocessor 8085 ArchitectureHarjot KaurNo ratings yet
- CH-6 Basics of MicroprocessorsDocument38 pagesCH-6 Basics of MicroprocessorsbelaynehNo ratings yet
- COA Unit 1Document25 pagesCOA Unit 1Shivam KumarNo ratings yet
- Lec - 1 - Lec - 2Document30 pagesLec - 1 - Lec - 2Mehedi Hasan EmonNo ratings yet
- Unit - 2 COADocument23 pagesUnit - 2 COAArun KrishNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Microcontrollerpresentation 141213101338 Conversion Gate01Document41 pagesMicrocontrollerpresentation 141213101338 Conversion Gate01priyalNo ratings yet
- Microprocessor Architecture and Programming with 8085Document56 pagesMicroprocessor Architecture and Programming with 8085sanjoy banerjeeNo ratings yet
- Microprocessor and Assembly LanguageDocument32 pagesMicroprocessor and Assembly Languagemehr un nisaNo ratings yet
- Lecture-1 (Introduction, Hardwired Logic) : MPI Unit 1Document34 pagesLecture-1 (Introduction, Hardwired Logic) : MPI Unit 1Tushar VermaNo ratings yet
- Microprocesser 8085Document8 pagesMicroprocesser 8085Nilesh PatilNo ratings yet
- Introduction to Peripherals and Interfacing LectureDocument23 pagesIntroduction to Peripherals and Interfacing Lectureabu sayedNo ratings yet
- Microcontrollers vs MicroprocessorsDocument20 pagesMicrocontrollers vs MicroprocessorsGucciNo ratings yet
- Microprocessor Fundamentals Questions and AnswersDocument90 pagesMicroprocessor Fundamentals Questions and AnswersANIRUDDHA PAULNo ratings yet
- Hett206 Hph215 Lecture 2Document44 pagesHett206 Hph215 Lecture 2Joshua DomaNo ratings yet
- Lecture 1Document17 pagesLecture 1Naveed IqbalNo ratings yet
- Microprocessor Lec No.1Document26 pagesMicroprocessor Lec No.1bashirahmed bashirahmedNo ratings yet
- Introduction To 8085Document139 pagesIntroduction To 8085eldho k josephNo ratings yet
- LAB02Document23 pagesLAB02زياد عبدالله عبدالحميد100% (1)
- Introduction to Microprocessor in 40 CharactersDocument15 pagesIntroduction to Microprocessor in 40 Characterskalash satypalNo ratings yet
- Computer System OrganizationDocument126 pagesComputer System Organizationbiswadeepbasak0212No ratings yet
- SEC1310Document169 pagesSEC1310Su YeeNo ratings yet
- Microcontrollers LectureDocument13 pagesMicrocontrollers LectureIrvine ChibayaNo ratings yet
- TOPIC - 1 MicroprocessorDocument38 pagesTOPIC - 1 MicroprocessorPrevenaManiamNo ratings yet
- CS113 Computer Architecture Utilise Moodle for Course MaterialDocument24 pagesCS113 Computer Architecture Utilise Moodle for Course MaterialJaycob PageNo ratings yet
- MPMC NotesDocument122 pagesMPMC NotesRohan HotaNo ratings yet
- Microprocessor question bank solutionDocument12 pagesMicroprocessor question bank solutionKrishilNo ratings yet
- Presentaion 6 Microcontroller and MicroprocessorDocument27 pagesPresentaion 6 Microcontroller and MicroprocessorwabdushukurNo ratings yet
- MP Manual 2Document73 pagesMP Manual 2Subir ShresthaNo ratings yet
- Microcontroller Viva Questions and AnswersDocument5 pagesMicrocontroller Viva Questions and Answerspankaj yadav100% (2)
- 2nd CHAPTER MechatronicsDocument50 pages2nd CHAPTER MechatronicspremscrebdNo ratings yet
- Microprocessor and ControllerDocument18 pagesMicroprocessor and ControllerSai Murali SirapuNo ratings yet
- Embedded SystemsDocument136 pagesEmbedded Systemsjapheth louie m. gofredoNo ratings yet
- Coa CT 1 QBDocument43 pagesCoa CT 1 QBNilesh bibhutiNo ratings yet
- Module 3 CoaDocument17 pagesModule 3 CoaGourab DashNo ratings yet
- The Von Neumann Computer ModelDocument11 pagesThe Von Neumann Computer ModelJerome ScottNo ratings yet
- Microprocessor FINALDocument8 pagesMicroprocessor FINALbocemay268No ratings yet
- Microprocessor Systems ExplainedDocument82 pagesMicroprocessor Systems ExplainedEnesVSNo ratings yet
- Computer Orgn 230428 235533Document10 pagesComputer Orgn 230428 235533Arathi SuryaramananNo ratings yet
- Microprocessor and Peripherals Interfacing Notes: Course Code: ECC501 Class: TE-EXTC Mumbai UniversityDocument10 pagesMicroprocessor and Peripherals Interfacing Notes: Course Code: ECC501 Class: TE-EXTC Mumbai UniversityAnikhet MulkyNo ratings yet
- (RB) COA - Notes UNIT-1Document20 pages(RB) COA - Notes UNIT-1aryanraj22760No ratings yet
- Introduction to MicroprocessorsDocument21 pagesIntroduction to MicroprocessorsMohit D MoreNo ratings yet
- Scheme of Work Ss2 First Term: Week Topic Central Processing Unit (CPU)Document13 pagesScheme of Work Ss2 First Term: Week Topic Central Processing Unit (CPU)Daniel ataikimNo ratings yet
- Chapter 3CEDocument19 pagesChapter 3CEMohammedNo ratings yet
- UNIT-I: Introduction To Microprocessors: Microprocessor and MicrocontrollersDocument14 pagesUNIT-I: Introduction To Microprocessors: Microprocessor and MicrocontrollersAtif HussainNo ratings yet
- How to Clean Gas Stove BurnerDocument1 pageHow to Clean Gas Stove Burnerdanilopangatungan8No ratings yet
- Demonstration On How To Operate A BlenderDocument24 pagesDemonstration On How To Operate A Blenderdanilopangatungan8No ratings yet
- Actuators and Drive SystemDocument58 pagesActuators and Drive Systemdanilopangatungan8No ratings yet
- Block Diagram For Alcohol DispenserDocument1 pageBlock Diagram For Alcohol Dispenserdanilopangatungan8No ratings yet
- Octal To BinaryDocument21 pagesOctal To Binarydanilopangatungan8No ratings yet
- Types of Logic CircuitsDocument11 pagesTypes of Logic Circuitsdanilopangatungan8No ratings yet
- How Main Memory Is Useful in Computer System? Explain The Memory Address Map of RAM and ROMDocument12 pagesHow Main Memory Is Useful in Computer System? Explain The Memory Address Map of RAM and ROMSai Ram100% (1)
- Introduction to Java Programming LanguageDocument247 pagesIntroduction to Java Programming LanguageAnil Kumar PalvaiNo ratings yet
- B A T A A N: Colegio de San Juan de LetranDocument2 pagesB A T A A N: Colegio de San Juan de LetranMyles Ninon LazoNo ratings yet
- Section 6 Host Link CommandsDocument35 pagesSection 6 Host Link CommandsvitexNo ratings yet
- QS Comput SO PDFDocument64 pagesQS Comput SO PDFsramsahaNo ratings yet
- CBC - 2D Digital Animation NC IIIDocument72 pagesCBC - 2D Digital Animation NC IIIKarl Jc P. Bongcasan50% (4)
- Handouts (PM, ISAD, MIT)Document26 pagesHandouts (PM, ISAD, MIT)Hazeleen BrionesNo ratings yet
- Computer Aided Process Planning (Capp)Document21 pagesComputer Aided Process Planning (Capp)raviNo ratings yet
- Concrete Slab Design Using Mathcad PDFDocument7 pagesConcrete Slab Design Using Mathcad PDFDiaconu SofiaNo ratings yet
- Classroom Design StandardsDocument28 pagesClassroom Design StandardsKosygin LeishangthemNo ratings yet
- L01computersystemservicing 180706084428Document26 pagesL01computersystemservicing 180706084428Janine B. JavierNo ratings yet
- DISTRIBUTED COMPUTING LAB Final CopyDocument15 pagesDISTRIBUTED COMPUTING LAB Final CopyLevin WasikeNo ratings yet
- Introduction To Information TechnologyDocument4 pagesIntroduction To Information TechnologynabyomNo ratings yet
- Basic Computer Operation: Advance Information and Communication TechnologyDocument45 pagesBasic Computer Operation: Advance Information and Communication TechnologyChadweck FidelinoNo ratings yet
- As 1101-6 Process Measurement & Control SymbolsDocument54 pagesAs 1101-6 Process Measurement & Control SymbolspvdangNo ratings yet
- Defectomat® DS 2.815Document12 pagesDefectomat® DS 2.815Khaled OuniciNo ratings yet
- Dominion - A Novel in The X-Universe by Darren Steel AstlesDocument191 pagesDominion - A Novel in The X-Universe by Darren Steel AstlesRoccoSuasitoNo ratings yet
- ITE 131 Course GuideDocument11 pagesITE 131 Course GuideJeffrey MondejarNo ratings yet
- Introduction to Computers: A Guide to the Evolution, Components, Uses and AcquisitionDocument21 pagesIntroduction to Computers: A Guide to the Evolution, Components, Uses and AcquisitionMaria ManziNo ratings yet
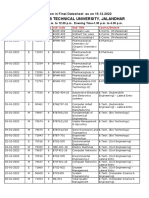
- Ik Gujral Punjab Technical University, Jalandhar: New Addition in Final Datesheet As On 15.12.2022Document7 pagesIk Gujral Punjab Technical University, Jalandhar: New Addition in Final Datesheet As On 15.12.2022Student FourteenNo ratings yet
- Intregated English Listening Book 2Document68 pagesIntregated English Listening Book 2RiesNo ratings yet
- Presentation 1 - Introdution To ComputerDocument72 pagesPresentation 1 - Introdution To ComputerRyan NguyaNo ratings yet
- Coding For Everyone Beginner Guide ExportDocument59 pagesCoding For Everyone Beginner Guide ExportLuismar Carrillo AlvarezNo ratings yet
- Applying Scratch Programming To Facilitate Teaching in K 12 ClassroomsDocument9 pagesApplying Scratch Programming To Facilitate Teaching in K 12 ClassroomslucasNo ratings yet
- Nepal Higher Seconday School Rathnanagar 2, Tandi, Chitwan Second Terminal Examination - 2073 (Mangshir)Document2 pagesNepal Higher Seconday School Rathnanagar 2, Tandi, Chitwan Second Terminal Examination - 2073 (Mangshir)Nishad MallaNo ratings yet
- Choice Board-Course 2 Synch 1 - End-Of-Session TaskDocument2 pagesChoice Board-Course 2 Synch 1 - End-Of-Session TaskLawrence Corpus AducaNo ratings yet
- ICT-CSS 11 - Q1 - W2 - Mod2Document21 pagesICT-CSS 11 - Q1 - W2 - Mod2Albino LarozaNo ratings yet
- Courier Management SystemDocument5 pagesCourier Management SystemMontoshDeyNo ratings yet
- Kartu Soal 40,41,42Document4 pagesKartu Soal 40,41,42newmanhdNo ratings yet
- Using computers and the internetDocument3 pagesUsing computers and the internetPrathamesh SamrutNo ratings yet