You might also like
- Open World First B2 Students BookDocument257 pagesOpen World First B2 Students BookTuan Anh Bui88% (8)
- 3.mathematical Modeling of Mechanical Systems and Electrical SystemsDocument49 pages3.mathematical Modeling of Mechanical Systems and Electrical SystemsMikiNo ratings yet
- CS - Chapter 7Document50 pagesCS - Chapter 7Mynam MeghanaNo ratings yet
- 91lecture3 SSModelDocument49 pages91lecture3 SSModelzoom meetingNo ratings yet
- Prestige Institute of Engineering & Science Indore (M.P.)Document3 pagesPrestige Institute of Engineering & Science Indore (M.P.)SagarManjrekarNo ratings yet
- Linear Analysis 3 03 2017Document25 pagesLinear Analysis 3 03 2017Rangan SrinivasanNo ratings yet
- EP 5511 - Lecture 08Document23 pagesEP 5511 - Lecture 08Solomon Tadesse AthlawNo ratings yet
- State Space For Dynamic SystemDocument44 pagesState Space For Dynamic SystemThafer MajeedNo ratings yet
- Control Systems-2011: Group Home PageDocument15 pagesControl Systems-2011: Group Home Pagemeenachintan3438No ratings yet
- Control Theory - Digital Control SystemDocument8 pagesControl Theory - Digital Control System1realestabassNo ratings yet
- PQI 5780 - Chemical Processes Control I: T T T T T T TDocument102 pagesPQI 5780 - Chemical Processes Control I: T T T T T T Twa_moreiraNo ratings yet
- Control System PPKDocument42 pagesControl System PPKP Praveen KumarNo ratings yet
- State Space RepresentationDocument19 pagesState Space Representationjiraya chiNo ratings yet
- State Variable Analysis 1 FinalDocument75 pagesState Variable Analysis 1 Finalprabhabathi deviNo ratings yet
- CHAPTER 4 State Space Analysis and Desig PDFDocument43 pagesCHAPTER 4 State Space Analysis and Desig PDFbimam brefNo ratings yet
- MSC Lecture06Document28 pagesMSC Lecture06Arpan GayenNo ratings yet
- E707 - Modern Control-2Document73 pagesE707 - Modern Control-2Raji Bello UmarNo ratings yet
- Asynchronous Sequential Circuits: E&CE223 Digital Circuits and SystemsDocument45 pagesAsynchronous Sequential Circuits: E&CE223 Digital Circuits and SystemskirthicaNo ratings yet
- Asynchronous Sequential Circuits: E&CE223 Digital Circuits and SystemsDocument45 pagesAsynchronous Sequential Circuits: E&CE223 Digital Circuits and Systemskirthica100% (1)
- Non-Linear Systems: Phase Plane AnalysisDocument60 pagesNon-Linear Systems: Phase Plane Analysisvenkat rajNo ratings yet
- Process Control 5Document21 pagesProcess Control 5Mohamad AbdelkaderNo ratings yet
- Chapter 04 Systems of ODEs. Phase Plane. Qualitative MethodsDocument6 pagesChapter 04 Systems of ODEs. Phase Plane. Qualitative MethodsSider HsiaoNo ratings yet
- E707 - Modern ControlDocument86 pagesE707 - Modern ControlRaji Bello UmarNo ratings yet
- 8-Lecture 39 TF To SS and SS To TF ConversionDocument18 pages8-Lecture 39 TF To SS and SS To TF ConversionHamza KhanNo ratings yet
- ST 11 StateSpaceDocument6 pagesST 11 StateSpacePlayNo ratings yet
- Dynamic Model Analysis of A DC Motor in MATLABDocument21 pagesDynamic Model Analysis of A DC Motor in MATLABWildan MumtazNo ratings yet
- Eee 2502 Control Engineering Notes 2015Document55 pagesEee 2502 Control Engineering Notes 2015powertechenteprisesNo ratings yet
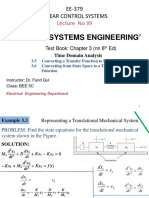
- "Control Systems Engineering": Text Book: Chapter 3 (NN 6 Ed)Document18 pages"Control Systems Engineering": Text Book: Chapter 3 (NN 6 Ed)umair khalilNo ratings yet
- "Control Systems Engineering": Text Book: Chapter 3 (NN 6 Ed)Document18 pages"Control Systems Engineering": Text Book: Chapter 3 (NN 6 Ed)umair khalilNo ratings yet
- Chapter 5 - State Space RepresentationDocument37 pagesChapter 5 - State Space Representationvenosyah devanNo ratings yet
- Dynamics of Systems Phase Plane Analysis For Nonlinear SystemsDocument25 pagesDynamics of Systems Phase Plane Analysis For Nonlinear SystemsDerry RenaldyNo ratings yet
- 7-Lecture 38 State Space RepresentationDocument16 pages7-Lecture 38 State Space RepresentationHamza KhanNo ratings yet
- Chapter 3Document39 pagesChapter 3Nashit AhmedNo ratings yet
- Modern Control: Dr.-Ing. Erwin Sitompul President UniversityDocument21 pagesModern Control: Dr.-Ing. Erwin Sitompul President UniversityIan John MontalboNo ratings yet
- Me302 Fluid Mechanics Ii: Rectangular Coordinate SystemDocument8 pagesMe302 Fluid Mechanics Ii: Rectangular Coordinate SystemAli DoğruNo ratings yet
- Unit-I-Ii PPT2Document128 pagesUnit-I-Ii PPT2arnav gedamNo ratings yet
- Modelling of Control Systems: State-Variable RepresentationDocument13 pagesModelling of Control Systems: State-Variable RepresentationYusuf CosToNo ratings yet
- Objectives:: The State EquationsDocument12 pagesObjectives:: The State EquationsHasan AljabaliNo ratings yet
- Spline Method of InterpolationDocument7 pagesSpline Method of InterpolationNadineNo ratings yet
- Jacobimethod 160325165743 PDFDocument20 pagesJacobimethod 160325165743 PDFFaisal RafiqueNo ratings yet
- Eee 407 Control Engineering IIDocument39 pagesEee 407 Control Engineering IIIbrahim Dalafika AbdullahiNo ratings yet
- Chapter 4 Controllability and ObservabilityDocument24 pagesChapter 4 Controllability and ObservabilityYucheng XiangNo ratings yet
- Objectives:: The State EquationsDocument12 pagesObjectives:: The State Equationsahmed_nassef2004No ratings yet
- "Control Systems Engineering": Text Book: Chapter 3 (NN 6 Ed)Document17 pages"Control Systems Engineering": Text Book: Chapter 3 (NN 6 Ed)umair khalilNo ratings yet
- State Space Analysis and DesignDocument43 pagesState Space Analysis and DesignHassanein Al-hadadNo ratings yet
- P436 Lect 16Document21 pagesP436 Lect 16Zhenhua HuangNo ratings yet
- Structural Dynamics NotesDocument61 pagesStructural Dynamics Noteskpsd58625No ratings yet
- State Space Analysis by Dr. FidaDocument44 pagesState Space Analysis by Dr. FidaAyesha TehreemNo ratings yet
- 10 Wave Equations 20 Sept 2016Document36 pages10 Wave Equations 20 Sept 2016Faisal Khotibul AmriNo ratings yet
- Pattern Recognition and Machine Learning: Fuzzy Sets in Pattern Recognition Debrup Chakraborty CinvestavDocument15 pagesPattern Recognition and Machine Learning: Fuzzy Sets in Pattern Recognition Debrup Chakraborty CinvestavAvishek ChandraNo ratings yet
- Multi Degree of Freedom Systems - 1Document46 pagesMulti Degree of Freedom Systems - 1soqhNo ratings yet
- State Space AnalysisDocument89 pagesState Space Analysissongzheng chenNo ratings yet
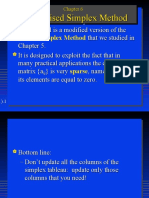
- The Revised Simplex Method The Revised Simplex MethodDocument26 pagesThe Revised Simplex Method The Revised Simplex MethodAmisha Ashish PatelNo ratings yet
- EE 312 Lecture 3Document15 pagesEE 312 Lecture 3دكتور كونوهاNo ratings yet
- Seetb255 Csexp8Document10 pagesSeetb255 Csexp8TEETB252Srushti ChoudhariNo ratings yet
- Lecture 6: More Matlab Functions, Transformations: Professor Erik Cheever Course Web PageDocument26 pagesLecture 6: More Matlab Functions, Transformations: Professor Erik Cheever Course Web PageAldo RodNo ratings yet
- Control Eng IIIDocument66 pagesControl Eng IIIeuticusNo ratings yet
- Kalman Filtering Practical Work: Last Name: First Name: GroupDocument9 pagesKalman Filtering Practical Work: Last Name: First Name: GroupFabricio VilcacundoNo ratings yet
- Behaviour of Nonlinear SystemsDocument11 pagesBehaviour of Nonlinear SystemsCheenu SinghNo ratings yet
- ESC201T L34 KmapDocument33 pagesESC201T L34 KmapRachit MahajanNo ratings yet
- Template For Project Writing (Fen, Fuo)Document10 pagesTemplate For Project Writing (Fen, Fuo)Mustapha AbdullahiNo ratings yet
- SOLAR CERTIFICATION-WPS OfficeDocument2 pagesSOLAR CERTIFICATION-WPS OfficeMustapha AbdullahiNo ratings yet
- SSRN Id2772630 Tjeuuhgyfguh7776445Document6 pagesSSRN Id2772630 Tjeuuhgyfguh7776445Mustapha AbdullahiNo ratings yet
- UJET20200827185558-An Assessment of Distribution Transformers Performance Within Kaduna Metropolis, NigeriaDocument17 pagesUJET20200827185558-An Assessment of Distribution Transformers Performance Within Kaduna Metropolis, NigeriaMustapha AbdullahiNo ratings yet
- Engineering Management For Undergraduates in EngineeringDocument28 pagesEngineering Management For Undergraduates in EngineeringMustapha AbdullahiNo ratings yet
- AutoCad 2012 ReadmeDocument2 pagesAutoCad 2012 Readmema_basith50% (2)
- QQQQ PDFDocument484 pagesQQQQ PDFSagor Saha100% (1)
- Barotac Nuevo POP PDFDocument10 pagesBarotac Nuevo POP PDFJason Barrios PortadaNo ratings yet
- Physiology 102Document5 pagesPhysiology 102Javed AkhlaqNo ratings yet
- Bba-Mq Tias 2023-24Document2 pagesBba-Mq Tias 2023-24Chris PresleyNo ratings yet
- Sample From Cambridge AssessmentDocument2 pagesSample From Cambridge AssessmentVinicius GomesNo ratings yet
- Nursing Education Field TripDocument5 pagesNursing Education Field TripIshika Roy67% (3)
- Mad-Lib ExerciseDocument2 pagesMad-Lib Exercisejbk23100% (2)
- CostcoDocument12 pagesCostcoThảo Nguyên PhạmNo ratings yet
- Management Information SystemDocument65 pagesManagement Information SystemMuhammad FaizanNo ratings yet
- 2003 Wiley Periodicals, Inc.: Max VisserDocument10 pages2003 Wiley Periodicals, Inc.: Max VisserMariano DomanicoNo ratings yet
- Social Studies Lesson Plan 3Document4 pagesSocial Studies Lesson Plan 3api-260708940No ratings yet
- XDocument2 pagesXSophiaFrancescaEspinosaNo ratings yet
- Competency Based Learning Materials: Housekeeping NciiDocument54 pagesCompetency Based Learning Materials: Housekeeping NciiNickolodian AsuncionNo ratings yet
- Yogesh Kadam (ABC)Document5 pagesYogesh Kadam (ABC)vipin HNo ratings yet
- Stats 2B03 Test #1 (Version 4) October 26th, 2009Document7 pagesStats 2B03 Test #1 (Version 4) October 26th, 2009examkillerNo ratings yet
- 2 - ARM Cotex-M3 - IntroductionDocument124 pages2 - ARM Cotex-M3 - IntroductionNghĩa VũNo ratings yet
- Rexroth 4we10 Data Sheet PDFDocument10 pagesRexroth 4we10 Data Sheet PDFSIVARAMANJAGANATHANNo ratings yet
- Type Italian Characters - Online Italian KeyboardDocument3 pagesType Italian Characters - Online Italian KeyboardGabriel PereiraNo ratings yet
- Gamla Stan PDFDocument4 pagesGamla Stan PDFAlexandra FricosuNo ratings yet
- Fleet Management 101 Training Part 1:: Presenters Gary Hatfield, Mercury Associates William Gookin, Mercury AssociatesDocument22 pagesFleet Management 101 Training Part 1:: Presenters Gary Hatfield, Mercury Associates William Gookin, Mercury AssociatesAdolphe Hotereshi100% (1)
- Multiple Choice Questions: This Activity Contains 15 QuestionsDocument4 pagesMultiple Choice Questions: This Activity Contains 15 QuestionsRaman Kulkarni100% (1)
- Admissions: Application ProceduresDocument13 pagesAdmissions: Application Proceduresisber7abdoNo ratings yet
- KV Admission EnclosureDocument1 pageKV Admission EnclosureLaishram PilotNo ratings yet
- Introduction To Montenegrin LanguageDocument15 pagesIntroduction To Montenegrin LanguageSanja MacutNo ratings yet
- Passive Voice PDFDocument5 pagesPassive Voice PDFJohan FloresNo ratings yet
- CHAPTER 5 Work MeasurementDocument24 pagesCHAPTER 5 Work MeasurementAiman SupniNo ratings yet
- Questão 13: Technology Anticipates Fast-Food Customers' OrdersDocument3 pagesQuestão 13: Technology Anticipates Fast-Food Customers' OrdersOziel LeiteNo ratings yet
- Eligibility Conditions: Advertisement For Regular Commission in Pakistan Army Through 136 Pma Long CourseDocument5 pagesEligibility Conditions: Advertisement For Regular Commission in Pakistan Army Through 136 Pma Long CourseHusnain IshtiaqNo ratings yet