You might also like
- Coen507 Control Engineering III-1Document28 pagesCoen507 Control Engineering III-1Mustapha AbdullahiNo ratings yet
- EP 5511 - Lecture 08Document23 pagesEP 5511 - Lecture 08Solomon Tadesse AthlawNo ratings yet
- State Space Modeling FundamentalsDocument19 pagesState Space Modeling Fundamentalsjiraya chiNo ratings yet
- Prestige Institute of Engineering & Science Indore (M.P.)Document3 pagesPrestige Institute of Engineering & Science Indore (M.P.)SagarManjrekarNo ratings yet
- 91lecture3 SSModelDocument49 pages91lecture3 SSModelzoom meetingNo ratings yet
- Asynchronous Sequential Circuits: E&CE223 Digital Circuits and SystemsDocument45 pagesAsynchronous Sequential Circuits: E&CE223 Digital Circuits and Systemskirthica100% (1)
- Asynchronous Sequential Circuits: E&CE223 Digital Circuits and SystemsDocument45 pagesAsynchronous Sequential Circuits: E&CE223 Digital Circuits and SystemskirthicaNo ratings yet
- PQI 5780 - Chemical Processes Control I: T T T T T T TDocument102 pagesPQI 5780 - Chemical Processes Control I: T T T T T T Twa_moreiraNo ratings yet
- Linear Analysis 3 03 2017Document25 pagesLinear Analysis 3 03 2017Rangan SrinivasanNo ratings yet
- ECE 3512 Lecture 38: State Space Representations and SolutionsDocument12 pagesECE 3512 Lecture 38: State Space Representations and Solutionsahmed_nassef2004No ratings yet
- Objectives:: The State EquationsDocument12 pagesObjectives:: The State EquationsHasan AljabaliNo ratings yet
- Unit1 PDFDocument72 pagesUnit1 PDFRiddhijit ChattopadhyayNo ratings yet
- ST 11 StateSpaceDocument6 pagesST 11 StateSpacePlayNo ratings yet
- Unit-I-Ii PPT2Document128 pagesUnit-I-Ii PPT2arnav gedamNo ratings yet
- Process Control 5Document21 pagesProcess Control 5Mohamad AbdelkaderNo ratings yet
- State Space Modeling LectureDocument19 pagesState Space Modeling LectureAum4Eng HelpNo ratings yet
- Control Systems-2011: Group Home PageDocument15 pagesControl Systems-2011: Group Home Pagemeenachintan3438No ratings yet
- Control Theory - Digital Control SystemDocument8 pagesControl Theory - Digital Control System1realestabassNo ratings yet
- Control System PPKDocument42 pagesControl System PPKP Praveen KumarNo ratings yet
- State Space For Dynamic SystemDocument44 pagesState Space For Dynamic SystemThafer MajeedNo ratings yet
- MSC Lecture07Document22 pagesMSC Lecture07Abhishek AlderNo ratings yet
- Tutorial 3 LDSDocument3 pagesTutorial 3 LDSshivendra.singh.vermaNo ratings yet
- IC6601 UwDocument67 pagesIC6601 UwRajeevSangamNo ratings yet
- Lecture 8: Synchronous Digital Systems: DOC112: Computer Hardware Lecture 8 1Document6 pagesLecture 8: Synchronous Digital Systems: DOC112: Computer Hardware Lecture 8 1rinobiNo ratings yet
- MSC Lecture06Document28 pagesMSC Lecture06Arpan GayenNo ratings yet
- MSC Lecture07Document22 pagesMSC Lecture07BHAVNA AGARWALNo ratings yet
- Chapter 4 SlidesDocument40 pagesChapter 4 Slideskwaleed717No ratings yet
- DESIGNING SYNCHRONOUS COUNTERSDocument31 pagesDESIGNING SYNCHRONOUS COUNTERSAbdul RafayNo ratings yet
- Structural Dynamics NotesDocument61 pagesStructural Dynamics Noteskpsd58625No ratings yet
- Tutorial 1Document3 pagesTutorial 1shivendra.singh.vermaNo ratings yet
- Mathematical Modeling of Mechanical and Electrical SystemsDocument49 pagesMathematical Modeling of Mechanical and Electrical SystemsMikiNo ratings yet
- Modelling Simulation 04Document23 pagesModelling Simulation 04fahmiNo ratings yet
- Dynamic Model Analysis of A DC Motor in MATLABDocument21 pagesDynamic Model Analysis of A DC Motor in MATLABWildan MumtazNo ratings yet
- Lecture NotesDocument40 pagesLecture NotesSaurabh ChaubeyNo ratings yet
- Non-Linear Systems: Phase Plane AnalysisDocument60 pagesNon-Linear Systems: Phase Plane Analysisvenkat rajNo ratings yet
- Digital Control - Part Ii: Mieec, Deec, FeupDocument49 pagesDigital Control - Part Ii: Mieec, Deec, FeupDdnunodd NndanielnnNo ratings yet
- CE304-Unit 5-Lect1-Jumah2018Document10 pagesCE304-Unit 5-Lect1-Jumah2018محمد بركاتNo ratings yet
- TE 303 Lecture 02Document32 pagesTE 303 Lecture 02Muhammad HamzaNo ratings yet
- Chapter 04 Systems of ODEs. Phase Plane. Qualitative MethodsDocument6 pagesChapter 04 Systems of ODEs. Phase Plane. Qualitative MethodsSider HsiaoNo ratings yet
- State Space Analysis by Dr. FidaDocument44 pagesState Space Analysis by Dr. FidaAyesha TehreemNo ratings yet
- EE 301 Notes - Chapter 3 - Part 1Document17 pagesEE 301 Notes - Chapter 3 - Part 1farouq_razzaz2574No ratings yet
- PCE6101 Linear Systems Theory: (Controllability and Observability)Document33 pagesPCE6101 Linear Systems Theory: (Controllability and Observability)Birhex FeyeNo ratings yet
- Equivalent Dynamical Equations: Du CX Bu Ax X 0Document7 pagesEquivalent Dynamical Equations: Du CX Bu Ax X 0Anonymous PXyfxQlxrNo ratings yet
- Chapter 4 Controllability and ObservabilityDocument24 pagesChapter 4 Controllability and ObservabilityYucheng XiangNo ratings yet
- Lect19 Sequential Logic Part-2Document21 pagesLect19 Sequential Logic Part-2ramulakshmanan12No ratings yet
- State Variable Analysis ExplainedDocument75 pagesState Variable Analysis Explainedprabhabathi deviNo ratings yet
- Advance Control Lab Manual State Space ExperimentsDocument42 pagesAdvance Control Lab Manual State Space ExperimentsIshwari GhuleNo ratings yet
- Tut 5Document4 pagesTut 5Aakriti VermaNo ratings yet
- Controlability & StabilityDocument6 pagesControlability & StabilityRehman SaleemNo ratings yet
- Control Systems and Engineering Lesson 3Document46 pagesControl Systems and Engineering Lesson 3EdrielleNo ratings yet
- Inno2024 Emt4203 Control II Notes r5Document63 pagesInno2024 Emt4203 Control II Notes r5kabuej3No ratings yet
- cs2 PDFDocument84 pagescs2 PDFAjayNo ratings yet
- Modern Control: Dr.-Ing. Erwin Sitompul President UniversityDocument21 pagesModern Control: Dr.-Ing. Erwin Sitompul President UniversityIan John MontalboNo ratings yet
- Chapter 2Document16 pagesChapter 2eng.rayan1996No ratings yet
- Introduction To State Space Analysis - GATE Study Material in PDFDocument9 pagesIntroduction To State Space Analysis - GATE Study Material in PDFnidhi tripathiNo ratings yet
- TranformationDocument18 pagesTranformationkeerthiNo ratings yet
- Behaviour of Nonlinear SystemsDocument11 pagesBehaviour of Nonlinear SystemsCheenu SinghNo ratings yet
- Controllability Examples: Dr. Matthew Turner January 24, 2018Document3 pagesControllability Examples: Dr. Matthew Turner January 24, 2018JL TenorioNo ratings yet
- Game Engine Programming 2 Week 7 Module 2Document11 pagesGame Engine Programming 2 Week 7 Module 2Dean LevyNo ratings yet
- Tables of Lommel's Functions of Two Pure Imaginary Variables: Mathematical Tables SeriesFrom EverandTables of Lommel's Functions of Two Pure Imaginary Variables: Mathematical Tables SeriesNo ratings yet
- Heat Transfer PDFDocument145 pagesHeat Transfer PDFNikhilNo ratings yet
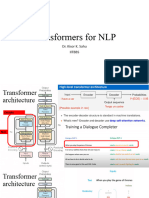
- Transformers For NLPDocument42 pagesTransformers For NLPMynam MeghanaNo ratings yet
- SCE Additional ProblemsDocument2 pagesSCE Additional ProblemsMynam MeghanaNo ratings yet
- Linked List: Joy MukherjeeDocument21 pagesLinked List: Joy MukherjeeMynam MeghanaNo ratings yet
- Thermodynamics PDFDocument202 pagesThermodynamics PDFLawNo ratings yet
- Viashwanath GBM Basin October 2018Document6 pagesViashwanath GBM Basin October 2018Mynam MeghanaNo ratings yet
- CS Chapter 8Document113 pagesCS Chapter 8Mynam MeghanaNo ratings yet
- Axiomatic Solutions To Transboundary River ConflictsDocument3 pagesAxiomatic Solutions To Transboundary River ConflictsMynam MeghanaNo ratings yet
- The Politicization of Water - Transboundary Water-Conflict in TheDocument90 pagesThe Politicization of Water - Transboundary Water-Conflict in TheMynam MeghanaNo ratings yet
- Chapter Three: Ac-Dc Conversion: Controlled RectificationsDocument88 pagesChapter Three: Ac-Dc Conversion: Controlled Rectificationsyemane gebremichalNo ratings yet
- Hall Effect Transducers and Applications Under 40 CharactersDocument16 pagesHall Effect Transducers and Applications Under 40 CharactersMynam MeghanaNo ratings yet
- Assignment TX LineDocument3 pagesAssignment TX LineMynam Meghana0% (1)
- Gestalt Problem SolvingDocument5 pagesGestalt Problem Solvingafaravani100% (10)
- Acf 20 With TablesDocument42 pagesAcf 20 With TablesIlya BortnilikNo ratings yet
- Gyro Position Control - Student ManualDocument55 pagesGyro Position Control - Student ManualBruno Martins Leite0% (1)
- Mathematical Modeling Techniques in Control SystemsDocument20 pagesMathematical Modeling Techniques in Control SystemsMouadh WahraniNo ratings yet
- Introduction To SimulinkDocument123 pagesIntroduction To SimulinkCristhianCoyoNo ratings yet
- State and State SpaceDocument76 pagesState and State Spacesohaib389892No ratings yet
- Controller Design of Inverted Pendulum Using Pole Placement and LQRDocument7 pagesController Design of Inverted Pendulum Using Pole Placement and LQRInternational Journal of Research in Engineering and Technology100% (1)
- Chapter 5 Alternative Representation in State SpaceDocument13 pagesChapter 5 Alternative Representation in State SpaceRakhmeen gulNo ratings yet
- Control Engineering III Techniques and ApplicationsDocument32 pagesControl Engineering III Techniques and Applicationseuticus100% (1)
- Circuit Analysis II Using MATLAB & SimulationDocument678 pagesCircuit Analysis II Using MATLAB & SimulationRana Abhishek Singh Kadgi100% (10)
- Autopilot Design Based On Robust LQR ApproachDocument5 pagesAutopilot Design Based On Robust LQR ApproachTry SusantoNo ratings yet
- Caltech technical report on flat systems and trajectory generationDocument79 pagesCaltech technical report on flat systems and trajectory generation李默然No ratings yet
- Artemis User GuideDocument132 pagesArtemis User GuideGokul KalyanNo ratings yet
- MEC522Document7 pagesMEC522Faiz IzzuddinNo ratings yet
- PowesSystemStability - Lecture Five - PPTDocument68 pagesPowesSystemStability - Lecture Five - PPTchalaNo ratings yet
- Control Theory PDFDocument86 pagesControl Theory PDFapi-3755845100% (1)
- Modern Control Theory and Power ElectronicsDocument34 pagesModern Control Theory and Power ElectronicsHarshal VaidyaNo ratings yet
- CSSP 5Document6 pagesCSSP 5MongiBESBESNo ratings yet
- Automatic Control For Mechanical EngineersDocument176 pagesAutomatic Control For Mechanical EngineersJuanV VeraNo ratings yet
- Introduction To Linear and Nonlinear ObserversDocument51 pagesIntroduction To Linear and Nonlinear ObserversBarış ÖzNo ratings yet
- (Control and Dynamic Systems 71) C.T. Leondes (Eds.) - Discrete-Time-Control System Analysis and Design-Elsevier, Academic Press (1995)Document363 pages(Control and Dynamic Systems 71) C.T. Leondes (Eds.) - Discrete-Time-Control System Analysis and Design-Elsevier, Academic Press (1995)Rishabh KaliaNo ratings yet
- Matrix Analysis For Scientists and Engineers by Alan J LaubDocument172 pagesMatrix Analysis For Scientists and Engineers by Alan J LaubJulio Cesar Barraza Bernaola91% (11)
- LMI-Based Robust Controllers For DC-DC Cascade Boost ConvertersDocument10 pagesLMI-Based Robust Controllers For DC-DC Cascade Boost ConvertersAmiir AmirNo ratings yet
- rr320201 Analysis of Linear SystemsDocument11 pagesrr320201 Analysis of Linear SystemsSRINIVASA RAO GANTANo ratings yet
- Book Review of Modern Signals and SystemsDocument3 pagesBook Review of Modern Signals and SystemsKelvinNo ratings yet
- Advanced Control Systems 2020-2021 Iv-Group Ii Mallikarjuna Reddy.MDocument21 pagesAdvanced Control Systems 2020-2021 Iv-Group Ii Mallikarjuna Reddy.Mveera maddipatiNo ratings yet
- Problem 1 - Speaker Model (20pts) : Figure 1: Simplified Loudspeaker System (Cross Section)Document2 pagesProblem 1 - Speaker Model (20pts) : Figure 1: Simplified Loudspeaker System (Cross Section)JhalaNo ratings yet
- Finding Deadlocks of Event-B Models by Constraint Solving: Stefan Hallerstede, Michael LeuschelDocument6 pagesFinding Deadlocks of Event-B Models by Constraint Solving: Stefan Hallerstede, Michael LeuschelhonganhleNo ratings yet
- R7220402 Control SystemsDocument1 pageR7220402 Control SystemssivabharathamurthyNo ratings yet