You might also like
- UCSB Ladder Inspection Form2 02042014 REVDocument2 pagesUCSB Ladder Inspection Form2 02042014 REVabu7omar-1No ratings yet
- Statically Determinate Plane TrussDocument56 pagesStatically Determinate Plane Trussஅருண்ராஜ் கிருஷ்ணன்சாமிNo ratings yet
- Chapter 6 Rigid Frame AnalysisDocument68 pagesChapter 6 Rigid Frame AnalysisPijuddin BhaniNo ratings yet
- How To Build A Payment Integration With ATG CommerceDocument5 pagesHow To Build A Payment Integration With ATG CommerceVishnu Vardhan100% (1)
- Structural AnalysisDocument146 pagesStructural AnalysisNadish PandeyNo ratings yet
- Design of Compression MembersDocument56 pagesDesign of Compression Memberstshepo hlakudiNo ratings yet
- Chapter7 Approximate Analysis of Stitically Deteminate StructureDocument42 pagesChapter7 Approximate Analysis of Stitically Deteminate StructureChime MornNo ratings yet
- Steel Deck Institute Diaphragm Design Manual Second EditionDocument279 pagesSteel Deck Institute Diaphragm Design Manual Second EditionGeoffre14No ratings yet
- Portal Frames ConstructionDocument47 pagesPortal Frames ConstructionYashi GuptaNo ratings yet
- Basic Theory of Structures: The Commonwealth and International Library: Mechanical Engineering DivisionFrom EverandBasic Theory of Structures: The Commonwealth and International Library: Mechanical Engineering DivisionRating: 4 out of 5 stars4/5 (4)
- Steel Buildings: Ferenc PappDocument29 pagesSteel Buildings: Ferenc PappThinn Thida HtayNo ratings yet
- Steel Members DesignDocument195 pagesSteel Members DesignStephen JamesNo ratings yet
- 11KV Capacitor Bank - SPECDocument7 pages11KV Capacitor Bank - SPECNasaii RayNo ratings yet
- MSX Basic ManualDocument105 pagesMSX Basic Manualelastomania67% (3)
- Stability of Structures: Principles and ApplicationsFrom EverandStability of Structures: Principles and ApplicationsRating: 4 out of 5 stars4/5 (4)
- Design of Compression Members PDFDocument56 pagesDesign of Compression Members PDFCanehurri HayesNo ratings yet
- TakeoffDocument298 pagesTakeoffFredMesquitaNo ratings yet
- Types of Structural FormsDocument21 pagesTypes of Structural FormsCorwyn Byrne88% (8)
- Analysis of Buildings For Gravity LoadsDocument10 pagesAnalysis of Buildings For Gravity LoadsPrashant SunagarNo ratings yet
- Chapter 5-Prestressed Concrete DesignDocument51 pagesChapter 5-Prestressed Concrete DesignAzrai AzizNo ratings yet
- Matrix Methods of Structural Analysis: Pergamon International Library of Science, Technology, Engineering and Social StudiesFrom EverandMatrix Methods of Structural Analysis: Pergamon International Library of Science, Technology, Engineering and Social StudiesRating: 4.5 out of 5 stars4.5/5 (3)
- Lesson 1 Eim 10Document17 pagesLesson 1 Eim 10stfup zeliaNo ratings yet
- LIPOMDDocument288 pagesLIPOMDKarlaMoránNo ratings yet
- Steel Chap5 Ultimate Limit StateDocument35 pagesSteel Chap5 Ultimate Limit StateMesfin Derbew86% (7)
- Truss Design PDFDocument131 pagesTruss Design PDFmsiddiq1No ratings yet
- BLEVEDocument1 pageBLEVEFerdinand Jude DcunhaNo ratings yet
- PurlinDocument19 pagesPurlinLia Ame100% (2)
- B0193ax3 - An-Integrated Control Block Descriptions (Vol 3) - (MSG - VLV)Document813 pagesB0193ax3 - An-Integrated Control Block Descriptions (Vol 3) - (MSG - VLV)zamNo ratings yet
- Design of Steel Structures, Prof. Dr. A. VarmaDocument178 pagesDesign of Steel Structures, Prof. Dr. A. Varmajohugh90100% (4)
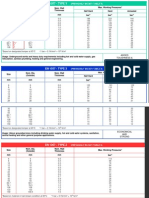
- BS en 1057 - Copper Pipework TablesDocument2 pagesBS en 1057 - Copper Pipework TablespaulnwhiteNo ratings yet
- IATA Guidance Material For SAFDocument37 pagesIATA Guidance Material For SAFUpendra Subedi100% (1)
- Buloane de Ancoraj PDFDocument29 pagesBuloane de Ancoraj PDFAndrei Cretu100% (1)
- Focke-Wulf FW 190Document30 pagesFocke-Wulf FW 190Eric T Holmes100% (2)
- CE382 Ch7 11Document42 pagesCE382 Ch7 11XXXFFXXXNo ratings yet
- Design and Detailing of Seismic Connections For Braced Frame StructuresDocument19 pagesDesign and Detailing of Seismic Connections For Braced Frame StructuresDavid SantiagoNo ratings yet
- Joints in Steel Structures Based On Eurocode 3Document17 pagesJoints in Steel Structures Based On Eurocode 3uhu_plus6482No ratings yet
- Built Up MembersDocument6 pagesBuilt Up Membersalberto rosadoNo ratings yet
- Shayanfar Rezaeian 2Document10 pagesShayanfar Rezaeian 2MizanuddinSitompulNo ratings yet
- MECH100 Lecture Chapter 4Document42 pagesMECH100 Lecture Chapter 4Kristina PonceNo ratings yet
- Simple Shear ConnectionsDocument44 pagesSimple Shear ConnectionsAdam JonesNo ratings yet
- Mini Project Mechanic StaticDocument16 pagesMini Project Mechanic StaticFatimah Nik Mazlan0% (1)
- Simple Braced Non-Sway Multi-Storey BuildingsDocument24 pagesSimple Braced Non-Sway Multi-Storey BuildingsElena RoșogaNo ratings yet
- 416 - Steel Members Design PDFDocument195 pages416 - Steel Members Design PDFdinoNo ratings yet
- Chapter 5: Steel: FEMA 356Document10 pagesChapter 5: Steel: FEMA 356mrea130No ratings yet
- FB-Multipier - Extended Validation SetDocument37 pagesFB-Multipier - Extended Validation SetAleksiey PellicciaNo ratings yet
- 小论文 - The Performance Comparison of Oxford and Triangle Flexure BearingsDocument8 pages小论文 - The Performance Comparison of Oxford and Triangle Flexure Bearings侯涛No ratings yet
- Distribution of Strains and Stresses Across A Cross-Section and General Design EquationsDocument13 pagesDistribution of Strains and Stresses Across A Cross-Section and General Design EquationskingNo ratings yet
- AD 283 - The Use of Discontinuous Columns in Simple ConstructionDocument3 pagesAD 283 - The Use of Discontinuous Columns in Simple Constructionsymon ellimacNo ratings yet
- AD 288 Discontinuous Columns in Simple Construction Beam-Column ConnectionDocument3 pagesAD 288 Discontinuous Columns in Simple Construction Beam-Column ConnectionMarco GomesNo ratings yet
- CHAPTER 2 Structural AnalysisDocument35 pagesCHAPTER 2 Structural AnalysisSky FireNo ratings yet
- Screenshot 2024-03-06 at 10.37.34 in The MorningDocument50 pagesScreenshot 2024-03-06 at 10.37.34 in The Morninglengchhanun893No ratings yet
- Lecture1 CSE 411Document62 pagesLecture1 CSE 411Sharon NaisoiNo ratings yet
- CE 3132 Module 05 - Analysis of Statically Determinate Structures (Part 1)Document8 pagesCE 3132 Module 05 - Analysis of Statically Determinate Structures (Part 1)FedieTabaquiraoNo ratings yet
- SBE SS5 SecureDocument131 pagesSBE SS5 SecureSergio ValeNo ratings yet
- Cen 304 Module 5 C Beams StabilityDocument49 pagesCen 304 Module 5 C Beams StabilityMica VerayeNo ratings yet
- Domes: 1. SIRI - 10091AA008 2.LOUKYA-10091AA026 3.MANISHA-10091AA034Document44 pagesDomes: 1. SIRI - 10091AA008 2.LOUKYA-10091AA026 3.MANISHA-10091AA034Samreen KhanNo ratings yet
- L5 - Shafts and Shaft ComponentsDocument29 pagesL5 - Shafts and Shaft ComponentsInsightful TutorsNo ratings yet
- 11 - Chapter 3 PDFDocument20 pages11 - Chapter 3 PDFFahad khNo ratings yet
- TrussesDocument52 pagesTrussesnurfathirahrosmanNo ratings yet
- Compression Members Under Axial LoadsDocument11 pagesCompression Members Under Axial LoadsPhil Wilsons MorenoNo ratings yet
- Steel Structures - Chapter 4Document13 pagesSteel Structures - Chapter 4abadittadesseNo ratings yet
- 14-2 Low-Rise FrameDocument23 pages14-2 Low-Rise FrameMohamed EssamNo ratings yet
- Report Example ColumnDocument46 pagesReport Example ColumnvirgoknNo ratings yet
- Chapter Five Buckling of Compression MembersDocument18 pagesChapter Five Buckling of Compression MembersYalem MesfinNo ratings yet
- Lec-1b - Types of StructuresDocument23 pagesLec-1b - Types of StructuresNouman AhmadNo ratings yet
- Building Technology (Construction) - V: T. Y. B. Arch. Sem. - V 2020-2021Document28 pagesBuilding Technology (Construction) - V: T. Y. B. Arch. Sem. - V 2020-2021Shad FarasNo ratings yet
- Chapter 1 - Introduction To Structural EngineeringDocument48 pagesChapter 1 - Introduction To Structural Engineeringiconoclasta100% (1)
- Two Mark Advanced Steel DesignDocument5 pagesTwo Mark Advanced Steel DesignSuthakar DuraisamyNo ratings yet
- Engineering Mechanics Module 2Document32 pagesEngineering Mechanics Module 2Abigail SiatrezNo ratings yet
- Chapter 5 Post-Tensioned SlabDocument19 pagesChapter 5 Post-Tensioned SlabSharan BvpNo ratings yet
- Finite Element Modeling of Concrete Masonry-Infilled (El-Dakhakhni, Et Al. 2008)Document15 pagesFinite Element Modeling of Concrete Masonry-Infilled (El-Dakhakhni, Et Al. 2008)Jose ManuelNo ratings yet
- Finite Element Modeling of Reinforced Concrete Beams Strengthened With FRP LaminatesDocument16 pagesFinite Element Modeling of Reinforced Concrete Beams Strengthened With FRP Laminatessvchaudhari100% (1)
- Updated Gantt and TimetableDocument3 pagesUpdated Gantt and TimetableRichelle PatricioNo ratings yet
- Plot-DrawingsDocument5 pagesPlot-DrawingsRichelle PatricioNo ratings yet
- Cen 401 Soil CompactionDocument97 pagesCen 401 Soil CompactionRichelle PatricioNo ratings yet
- Construction Occupational Health and Safety PolicyDocument5 pagesConstruction Occupational Health and Safety PolicyRichelle PatricioNo ratings yet
- Proctor Test MaterialsDocument16 pagesProctor Test MaterialsRichelle PatricioNo ratings yet
- Construction Site PremisesDocument84 pagesConstruction Site PremisesRichelle PatricioNo ratings yet
- Information Strategy Planning in Construction Framework and ProcessesDocument7 pagesInformation Strategy Planning in Construction Framework and ProcessesRichelle PatricioNo ratings yet
- Auckland Uni International Formblock TestDocument30 pagesAuckland Uni International Formblock TestNoe LandaverdeNo ratings yet
- Mapúa Institute of Technology: Guidelines For Writing Thesis / Practicum or Research ReportDocument11 pagesMapúa Institute of Technology: Guidelines For Writing Thesis / Practicum or Research ReportDozdi100% (1)
- Gujarat Technological University: % WeightageDocument4 pagesGujarat Technological University: % WeightageEr Samkit ShahNo ratings yet
- HoneypotsDocument17 pagesHoneypotsNipun VermaNo ratings yet
- Q-Cut 225C.pdsDocument1 pageQ-Cut 225C.pdstribolasNo ratings yet
- Catalog Dilos/FulosDocument102 pagesCatalog Dilos/FulosKostas TressosNo ratings yet
- AMP Slides Lecture17Document16 pagesAMP Slides Lecture17Foley OmoniyiNo ratings yet
- Tranferencia de MasDocument78 pagesTranferencia de MasdatinjacabNo ratings yet
- Commissioning GuideDocument2 pagesCommissioning GuideOreolNo ratings yet
- 00 Imper - Book PDFDocument144 pages00 Imper - Book PDFGiovanni LerasNo ratings yet
- Distance Rate Time Word Problems PDFDocument4 pagesDistance Rate Time Word Problems PDFwasabi999No ratings yet
- Activate AluminaDocument3 pagesActivate AluminaNazar AhmedNo ratings yet
- Why MastercamDocument30 pagesWhy MastercamMarius CucuietNo ratings yet
- Preparing Adobe PDF Files For High-Resolution Printing: Today's Prepress Workflow Works, But It Doesn't Really FlowDocument0 pagesPreparing Adobe PDF Files For High-Resolution Printing: Today's Prepress Workflow Works, But It Doesn't Really FlowSyed ShahNo ratings yet
- Dynamic Modelling and Optimized Model Predictive Control Strategies For The ORCDocument24 pagesDynamic Modelling and Optimized Model Predictive Control Strategies For The ORCYodha YudhistraNo ratings yet
- Effects of Load CyclingDocument7 pagesEffects of Load CyclingArighi Denny SaputraNo ratings yet
- InstructionsDocument18 pagesInstructionsSamuelNo ratings yet