You might also like
- CAM USMENI ISPIT Pitanja I Odgovori Vojo VišekrunaDocument9 pagesCAM USMENI ISPIT Pitanja I Odgovori Vojo VišekrunaTony GrayNo ratings yet
- Internet Ska - CNC Tehnologija U Drvnoj IndustrijiDocument49 pagesInternet Ska - CNC Tehnologija U Drvnoj IndustrijiMarko ŠapinaNo ratings yet
- CAD CAM OdgovoriDocument6 pagesCAD CAM Odgovorisiljeg.petarNo ratings yet
- Automatsko Programiranje - Dijagram TokaDocument5 pagesAutomatsko Programiranje - Dijagram TokaZijad HalilovicNo ratings yet
- Projektovanje TP Za CNC StrojeveDocument17 pagesProjektovanje TP Za CNC StrojeveramadanNo ratings yet
- CNC OsnoveDocument20 pagesCNC Osnovemecanica2000No ratings yet
- Programiranje CNC MašinaDocument14 pagesProgramiranje CNC MašinaAdnan BrkicNo ratings yet
- Automatsko Programiranje CNC StrojevaDocument7 pagesAutomatsko Programiranje CNC StrojevaM HasanovicNo ratings yet
- Pokretanje EMCO Concept Mill 450 PDFDocument31 pagesPokretanje EMCO Concept Mill 450 PDFdjuka65No ratings yet
- Definicija Fleksibilne ProizvodnjeDocument1 pageDefinicija Fleksibilne ProizvodnjeImšićMuradifNo ratings yet
- 50 CNC Tokarenje - Osnovni Semonar Sinumerik 840Document80 pages50 CNC Tokarenje - Osnovni Semonar Sinumerik 840figaro1234100% (2)
- AutoCAD Drawing ObjectsDocument34 pagesAutoCAD Drawing ObjectsKristijan JurčevićNo ratings yet
- Edin Trening Soldworks 2014Document6 pagesEdin Trening Soldworks 2014eibrahimovicNo ratings yet
- Pitanja I Odgovori Za Kolokvij Iz Proizvodnih TehnologijaDocument13 pagesPitanja I Odgovori Za Kolokvij Iz Proizvodnih TehnologijaIvor HorvatićNo ratings yet
- Razlike Između Klasičnih I CNC Alatnih StrojevaDocument2 pagesRazlike Između Klasičnih I CNC Alatnih StrojevaMesud BiogradlijaNo ratings yet
- Upravljanje Alatnog StrojaDocument106 pagesUpravljanje Alatnog StrojaHBracing1No ratings yet
- ACAD2008Document142 pagesACAD2008Hadzic Hanka100% (1)
- Priprema Za ProgramiranjeDocument38 pagesPriprema Za ProgramiranjeLachieDNo ratings yet
- QFD-upute Za RadDocument22 pagesQFD-upute Za RadIva M.No ratings yet
- Fleksibilni Proizvodni SustaviDocument10 pagesFleksibilni Proizvodni SustaviTony GrayNo ratings yet
- CAM - GT-ukratko+primjeriDocument73 pagesCAM - GT-ukratko+primjeriFranjo DominkovićNo ratings yet
- Seminarski Rad PatternDocument19 pagesSeminarski Rad PatternNikolaDjordjevic100% (1)
- Specijalisticki RadDocument49 pagesSpecijalisticki Radzolja2100% (1)
- QFD Metoda Luca 1Document17 pagesQFD Metoda Luca 1Znatizelja2013No ratings yet
- MonitoriDocument14 pagesMonitoriNezirevic MehmedNo ratings yet
- Obradni Sistemi 1 Za UsmeniDocument36 pagesObradni Sistemi 1 Za UsmeninimaksNo ratings yet
- Pitanja OdgovoriDocument7 pagesPitanja OdgovoriDomagojNo ratings yet
- Osnove Izrade Tehnickoga Crteza Primjenom Racunala Anka Ozana CavlovicDocument125 pagesOsnove Izrade Tehnickoga Crteza Primjenom Racunala Anka Ozana Cavlovicelma spahicNo ratings yet
- ASIMO - Seminarski RadDocument24 pagesASIMO - Seminarski RadJosip LjubićNo ratings yet
- Magistarski v7.1Document77 pagesMagistarski v7.1Sara TokicNo ratings yet
- 3 CAD Mold Dizajn (1) .PDF SOLIDWORKSDocument55 pages3 CAD Mold Dizajn (1) .PDF SOLIDWORKSLunyna100% (1)
- SolidCAM TokarenjeDocument18 pagesSolidCAM TokarenjeAlma DerviševićNo ratings yet
- 3d PrinterDocument17 pages3d PrinterMateaJosipovicNo ratings yet
- CNC Alatne MasineDocument26 pagesCNC Alatne MasineNikola NesicNo ratings yet
- 1 1 Posluzivanje CNC StrojevaDocument6 pages1 1 Posluzivanje CNC StrojevaDubravko KernNo ratings yet
- AutoCAD 2000 Osnove - Pog 01 PDFDocument20 pagesAutoCAD 2000 Osnove - Pog 01 PDFDuško NikolićNo ratings yet
- Sheet Metal SolidWorksDocument32 pagesSheet Metal SolidWorksqwertz_mNo ratings yet
- Dnevnik Rada PraksaDocument15 pagesDnevnik Rada PraksaJelenaNo ratings yet
- 10 Fanuc 21 - GlodanjeDocument53 pages10 Fanuc 21 - GlodanjeKrsmanovic Zoran0% (1)
- AutoCad Zadatak - 1Document11 pagesAutoCad Zadatak - 1Amer ZećoNo ratings yet
- Paralelni Algoritmi I Strukture PodatakaDocument30 pagesParalelni Algoritmi I Strukture PodatakaErnad BekticNo ratings yet
- Nastavni Plan I Program - CNC OperaterDocument84 pagesNastavni Plan I Program - CNC OperaterchobanzgNo ratings yet
- MK - p02 - Nosivi Dijelovi MK Metalne Konstrukcije Postolja Kućišta - WEBDocument19 pagesMK - p02 - Nosivi Dijelovi MK Metalne Konstrukcije Postolja Kućišta - WEBBojan MrvosNo ratings yet
- NC I CNC Programiranje U APT-uDocument25 pagesNC I CNC Programiranje U APT-uAzur AvdicNo ratings yet
- Dizajn Mehatroničkih SistemaDocument61 pagesDizajn Mehatroničkih SistemaLejla LMNo ratings yet
- SolidWorks - Vjezba 0r7Document8 pagesSolidWorks - Vjezba 0r7Nejra DedajićNo ratings yet
- Brizganje-Seminarski OsmanagicDocument19 pagesBrizganje-Seminarski OsmanagicADNAN REDZICNo ratings yet
- CAD CAM OdgovoriDocument7 pagesCAD CAM OdgovoriAnto KestenNo ratings yet
- 4 Upravljanje CNCDocument41 pages4 Upravljanje CNCTony GrayNo ratings yet
- Seminarski Rad Iz Cad CamDocument46 pagesSeminarski Rad Iz Cad CamAmir-Jasmina SalihovićNo ratings yet
- SEMINARSKI RAD - Tehnologija Obrade RezanjemDocument17 pagesSEMINARSKI RAD - Tehnologija Obrade RezanjemMirza Durakovic100% (1)
- PPR Sinutrain ShopmillDocument33 pagesPPR Sinutrain ShopmillAzra SarićNo ratings yet
- Osnove CNC U Preradi DrvetaDocument41 pagesOsnove CNC U Preradi DrvetaBljana100% (1)
- CNC ObradaDocument16 pagesCNC ObradaPetkovic100% (1)
- Maturski Ana TDocument28 pagesMaturski Ana TAnna KvesiićNo ratings yet
- Seminarski Rad CNCDocument13 pagesSeminarski Rad CNCthevucko10No ratings yet
- Odgovori CNCDocument19 pagesOdgovori CNCDario SlatkiNo ratings yet
- Osnove CNC Tehnike U Proizvodnom Procesu Obrade DrvaDocument55 pagesOsnove CNC Tehnike U Proizvodnom Procesu Obrade Drvamladen381100% (1)
- Direktno I Distribuirano Numeričko Upravljanje: Seminarski RadDocument17 pagesDirektno I Distribuirano Numeričko Upravljanje: Seminarski RadlelixNo ratings yet
- CNC Proces Ima Pet Osnovnih KorakaDocument10 pagesCNC Proces Ima Pet Osnovnih Korakalokid0907No ratings yet
- Raspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDocument2 pagesRaspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDaniel VuletaNo ratings yet
- Rezultati Pismenog Nuas2Document1 pageRezultati Pismenog Nuas2Daniel VuletaNo ratings yet
- S PDS 1Document1 pageS PDS 1Daniel VuletaNo ratings yet
- Pravilnik o Geotehničkim Istraživanjima I Ispitivanjima Te Organizaciji I Sadržaju Misija Geotehničkog Inženjerstva 60-09Document11 pagesPravilnik o Geotehničkim Istraživanjima I Ispitivanjima Te Organizaciji I Sadržaju Misija Geotehničkog Inženjerstva 60-09Nedžad RibićNo ratings yet
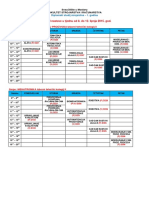
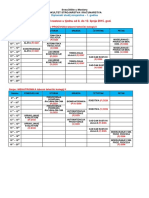
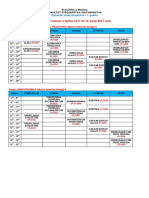
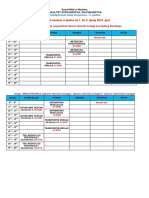
- Raspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. God.: Diplomski Studij Strojarstva - 2. GodinaDocument2 pagesRaspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. God.: Diplomski Studij Strojarstva - 2. GodinaDaniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 1. Do 5. Lipnja 2015. God.: Diplomski Studij Strojarstva - 2. GodinaDocument2 pagesRaspored Nastave U Tjednu Od 1. Do 5. Lipnja 2015. God.: Diplomski Studij Strojarstva - 2. GodinaDaniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDocument2 pagesRaspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDaniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDocument2 pagesRaspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDaniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 1. Do 5. Lipnja 2015. GodDocument2 pagesRaspored Nastave U Tjednu Od 1. Do 5. Lipnja 2015. GodDaniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 1. Do 5. Lipnja 2015. God.: Diplomski Studij Strojarstva - 2. GodinaDocument2 pagesRaspored Nastave U Tjednu Od 1. Do 5. Lipnja 2015. God.: Diplomski Studij Strojarstva - 2. GodinaDaniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. God.: Diplomski Studij Strojarstva - 2. GodinaDocument2 pagesRaspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. God.: Diplomski Studij Strojarstva - 2. GodinaDaniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDocument2 pagesRaspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDaniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 1. Do 5. Lipnja 2015. GodDocument2 pagesRaspored Nastave U Tjednu Od 1. Do 5. Lipnja 2015. GodDaniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDocument2 pagesRaspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDaniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDocument2 pagesRaspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDaniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. God.: Diplomski Studij Strojarstva - 2. GodinaDocument2 pagesRaspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. God.: Diplomski Studij Strojarstva - 2. GodinaDaniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDocument2 pagesRaspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDaniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDocument2 pagesRaspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDaniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 1. Do 5. Lipnja 2015. GodDocument2 pagesRaspored Nastave U Tjednu Od 1. Do 5. Lipnja 2015. GodDaniel VuletaNo ratings yet
- S PDS 3Document2 pagesS PDS 3Daniel VuletaNo ratings yet
- TehnickocrtanjeDocument33 pagesTehnickocrtanjeHari KarabegovićNo ratings yet
- 01-24 Uvod U TermodinamikuDocument24 pages01-24 Uvod U TermodinamikubazenicNo ratings yet
- Raspored Nastave U Tjednu Od 1. Do 5. Lipnja 2015. God.: Diplomski Studij Strojarstva - 2. GodinaDocument2 pagesRaspored Nastave U Tjednu Od 1. Do 5. Lipnja 2015. God.: Diplomski Studij Strojarstva - 2. GodinaDaniel VuletaNo ratings yet
- S PDS 2Document1 pageS PDS 2Daniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDocument2 pagesRaspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDaniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDocument2 pagesRaspored Nastave U Tjednu Od 8. Do 12. Lipnja 2015. GodDaniel VuletaNo ratings yet
- S PDS 1Document1 pageS PDS 1Daniel VuletaNo ratings yet
- Raspored Nastave U Tjednu Od 1. Do 5. Lipnja 2015. GodDocument2 pagesRaspored Nastave U Tjednu Od 1. Do 5. Lipnja 2015. GodDaniel VuletaNo ratings yet
- Promjena Smjera Vrtnje Grebenastom SklopkomDocument2 pagesPromjena Smjera Vrtnje Grebenastom SklopkomDaniel VuletaNo ratings yet
- Rezultati Pismenog Nuas2Document1 pageRezultati Pismenog Nuas2Daniel VuletaNo ratings yet