You might also like
- Solution Manual For Open Channel Hydraulics - Osman AkanDocument7 pagesSolution Manual For Open Channel Hydraulics - Osman AkanLINA GINED GONZALEZ MUNOZ100% (3)
- Solution Manual of Solid State Physics, Charles Kittles PDFDocument64 pagesSolution Manual of Solid State Physics, Charles Kittles PDFYeo Jun Yi100% (1)
- (Solutions) Kittel - Introduction To Solid State Physics 8Th EditionDocument60 pages(Solutions) Kittel - Introduction To Solid State Physics 8Th EditionCody Foster0% (1)
- Solution Chapter 6Document26 pagesSolution Chapter 6Cara WhiteNo ratings yet
- Power System Analysis II: Instructor: E-Mail: Office PhoneDocument66 pagesPower System Analysis II: Instructor: E-Mail: Office PhoneSelah TalepNo ratings yet
- SM - Lecture - 6 Simple Bending Theory and Beam DeflectionDocument7 pagesSM - Lecture - 6 Simple Bending Theory and Beam Deflectionsmok38442No ratings yet
- Classical Lamination TheoryDocument5 pagesClassical Lamination TheoryAlfonso FernandezNo ratings yet
- 06 PlateTheory 03 BendingTwistingDocument5 pages06 PlateTheory 03 BendingTwistingIrtiza ZafarNo ratings yet
- Sample Problems From Solving Dynamics Problems in Mathcad: by Brian D. Harper Ohio State UniversityDocument9 pagesSample Problems From Solving Dynamics Problems in Mathcad: by Brian D. Harper Ohio State UniversityMario Jucharo LaymeNo ratings yet
- Tugas Mekban HaekalDocument7 pagesTugas Mekban HaekalHaekal EmilchuzaemiNo ratings yet
- Variation PlatesDocument8 pagesVariation Platesdebanik13498No ratings yet
- Yield CriterionDocument36 pagesYield CriterionravindrababugNo ratings yet
- CH6 PDFDocument34 pagesCH6 PDFteknikpembakaran2013No ratings yet
- Mechanics Formula SheetDocument5 pagesMechanics Formula SheetWong Jian MingNo ratings yet
- Multiaxial HCF ModelsDocument14 pagesMultiaxial HCF ModelsAris VasileiouNo ratings yet
- Deflection and Buckling of LaminatesDocument33 pagesDeflection and Buckling of LaminatesfayuangNo ratings yet
- Yield LocusDocument36 pagesYield Locusshanthakumar100% (1)
- Introduction To Solid State Physics - Kittel, Charles - 8ed Solucionario PDFDocument61 pagesIntroduction To Solid State Physics - Kittel, Charles - 8ed Solucionario PDFmanuelomar87No ratings yet
- Selfstudys Com FileDocument126 pagesSelfstudys Com Fileat6485409No ratings yet
- Fundamental Mechanics of Materials EquationsDocument5 pagesFundamental Mechanics of Materials EquationsOmr'GzmnNo ratings yet
- Kuat GeserDocument29 pagesKuat GeserAgusSetiawanSugaNo ratings yet
- Mechanics of Solids Week 8 LecturesDocument17 pagesMechanics of Solids Week 8 LecturesFlynn GouldNo ratings yet
- Problema Statica 5Document2 pagesProblema Statica 5Cipar ClauNo ratings yet
- Aerodynamics 3Document10 pagesAerodynamics 3Ranjan Kumar SinghNo ratings yet
- CentroidDocument46 pagesCentroidkiranphd100% (2)
- 5.8.1 Governing Equations of Equilibrium of Composite LaminatesDocument11 pages5.8.1 Governing Equations of Equilibrium of Composite LaminatesStefano CanestrelliNo ratings yet
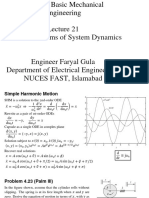
- Lecture 21Document12 pagesLecture 21I190845 Samana NayyabNo ratings yet
- FEM July 2022 Assignment No 1Document3 pagesFEM July 2022 Assignment No 1Siddharth KumarNo ratings yet
- Linear Motion Inverted Pendulum: Derivation of The State-Space ModelDocument8 pagesLinear Motion Inverted Pendulum: Derivation of The State-Space ModelAvinash DoddaNo ratings yet
- References: 10m/s 60cm 60cmDocument9 pagesReferences: 10m/s 60cm 60cmAliOucharNo ratings yet
- Strovink) : Solution To Final Examination Problem 1. A. Problem 2Document3 pagesStrovink) : Solution To Final Examination Problem 1. A. Problem 2Debiprasad PattnaikNo ratings yet
- 08 Plasticity 02 Stress AnalysisDocument7 pages08 Plasticity 02 Stress AnalysisAvijit DeyNo ratings yet
- Shaft Design Considerations: S. Waldman MECH 323Document11 pagesShaft Design Considerations: S. Waldman MECH 323Gaurav AgarwalNo ratings yet
- SSM Chapter 01Document16 pagesSSM Chapter 01Jao Wei KuangNo ratings yet
- Flow Over Immersed BodiesDocument72 pagesFlow Over Immersed BodiesAnggraita Eka Dani100% (1)
- Engineering Science - Dynamic Engineering SystemsDocument13 pagesEngineering Science - Dynamic Engineering SystemsSteven Goddard100% (1)
- Fox - Solucionário Cap 06Document161 pagesFox - Solucionário Cap 06Camila FerreiraNo ratings yet
- Review of Dynamics and Mechanisms of Machinery: MECH 103Document92 pagesReview of Dynamics and Mechanisms of Machinery: MECH 103Sunilkumar ReddyNo ratings yet
- Axisymmetric ProblemsDocument41 pagesAxisymmetric ProblemsAVINASH CHAVANNo ratings yet
- A Study On Weibull Distribution For Estimating The ParametersDocument8 pagesA Study On Weibull Distribution For Estimating The ParametersIrvanal HaqNo ratings yet
- AE 321 - Solution of Homework #4: 1. First construct Mohr's circle. At stresses at the given element are σDocument8 pagesAE 321 - Solution of Homework #4: 1. First construct Mohr's circle. At stresses at the given element are σArthur DingNo ratings yet
- Logical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeFrom EverandLogical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeNo ratings yet
- Application of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsFrom EverandApplication of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Factoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)From EverandFactoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)No ratings yet
- Transformation of Axes (Geometry) Mathematics Question BankFrom EverandTransformation of Axes (Geometry) Mathematics Question BankRating: 3 out of 5 stars3/5 (1)
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Problems in Quantum Mechanics: Third EditionFrom EverandProblems in Quantum Mechanics: Third EditionRating: 3 out of 5 stars3/5 (2)
- Instructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYFrom EverandInstructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYNo ratings yet
- Caisson 2Document11 pagesCaisson 2Supritha KNo ratings yet
- Patent International PaperDocument9 pagesPatent International PaperAjay TiwariNo ratings yet
- Chapter 3 (Slope Deflection)Document47 pagesChapter 3 (Slope Deflection)Kiran Koraddi100% (1)
- TMG-F 92Document524 pagesTMG-F 92Ένκινουαν Κόγκ ΑδάμουNo ratings yet
- Steam TrapsDocument27 pagesSteam Trapszula74No ratings yet
- Chemical EquilibriumDocument29 pagesChemical EquilibriumAjay ChoudharyNo ratings yet
- CPLRDocument2 pagesCPLRsofyanshahNo ratings yet
- Fisher Albrecht Yen Klingerman Mcnamee 1974Document98 pagesFisher Albrecht Yen Klingerman Mcnamee 1974Eric NolascoNo ratings yet
- IPICC-CK19-PWHT 2-Reviewed by MajidDocument4 pagesIPICC-CK19-PWHT 2-Reviewed by Majidaras osmanNo ratings yet
- Buoyancy Calculation Report: Tanap Trans Anatolian Natural Gas Pipeline ProjectDocument31 pagesBuoyancy Calculation Report: Tanap Trans Anatolian Natural Gas Pipeline ProjectbabuNo ratings yet
- Role of Repulsive Forces in Determining The Equilibrium Structure of Simple LiquidsDocument12 pagesRole of Repulsive Forces in Determining The Equilibrium Structure of Simple LiquidsPranavKherdekarNo ratings yet
- Model 35 Viscometer ManualDocument44 pagesModel 35 Viscometer Manualharshpatel18100% (2)
- Problemset1a AnswersDocument4 pagesProblemset1a AnswersMheira VillahermosaNo ratings yet
- Buffers and Salts Hydrolysis: 3-1. Preparation of Ammonium BufferDocument3 pagesBuffers and Salts Hydrolysis: 3-1. Preparation of Ammonium BufferaisarachemNo ratings yet
- Open ChannelDocument116 pagesOpen ChannelBřõwń Mäņ100% (1)
- Energetics - CN - STDT8Document2 pagesEnergetics - CN - STDT8NkemziNo ratings yet
- Resistance Coefficient KDocument14 pagesResistance Coefficient KNestor S. ReEyesNo ratings yet
- Organic Transistors OFTFDocument30 pagesOrganic Transistors OFTFIsrati ValeriuNo ratings yet
- 2508 - 2016 - 3rd Riv - Reff2022Document12 pages2508 - 2016 - 3rd Riv - Reff2022Deepak100% (1)
- Sheet Piling DesignDocument30 pagesSheet Piling Designchaichan100% (4)
- Organic Solar CellsDocument21 pagesOrganic Solar CellsTôn Vương NguyễnNo ratings yet
- Klueberoil 4 UH1-15 029029 PI GB enDocument2 pagesKlueberoil 4 UH1-15 029029 PI GB enMuhammad SaputraNo ratings yet
- Sections - SHS - Hot Formed (BS EN 10219-1997)Document8 pagesSections - SHS - Hot Formed (BS EN 10219-1997)Bradley GoldenNo ratings yet
- Flow Simulation of A DN100 Globe Valve Performance Report Generated Using SimulationHub's Autonomous Valve CFD AppDocument19 pagesFlow Simulation of A DN100 Globe Valve Performance Report Generated Using SimulationHub's Autonomous Valve CFD AppSneha ShettyNo ratings yet
- FullDocument909 pagesFullVIMALKAUMAR0% (1)
- WeldingDocument24 pagesWeldingbhushan wandreNo ratings yet
- Seismic Design and Performance Evaluation of Typical Lightweight and Heavyweight RC Girder Bridges With Friction Pendulum Bearing in IndonesiaDocument17 pagesSeismic Design and Performance Evaluation of Typical Lightweight and Heavyweight RC Girder Bridges With Friction Pendulum Bearing in IndonesiaBridge&StructureNo ratings yet
- Detection of Ski Slopes in Vibration SpectrumsDocument7 pagesDetection of Ski Slopes in Vibration SpectrumsjeyaselvanmNo ratings yet
- Emerson ProspektDocument32 pagesEmerson ProspektDejan CekovskiNo ratings yet
- Poster ScheduleDocument1 pagePoster ScheduleMuhammad ThurisinaNo ratings yet